看了B站up主DR_CAN讲的卡尔曼滤波(链接)。up讲的非常好,强烈推荐,看完终于明白了卡尔曼滤波的奥秘。下面是我对其中内容的注解,或者说自己的理解。大部分推导省略了,但保留了算法的思想脉络。
引入
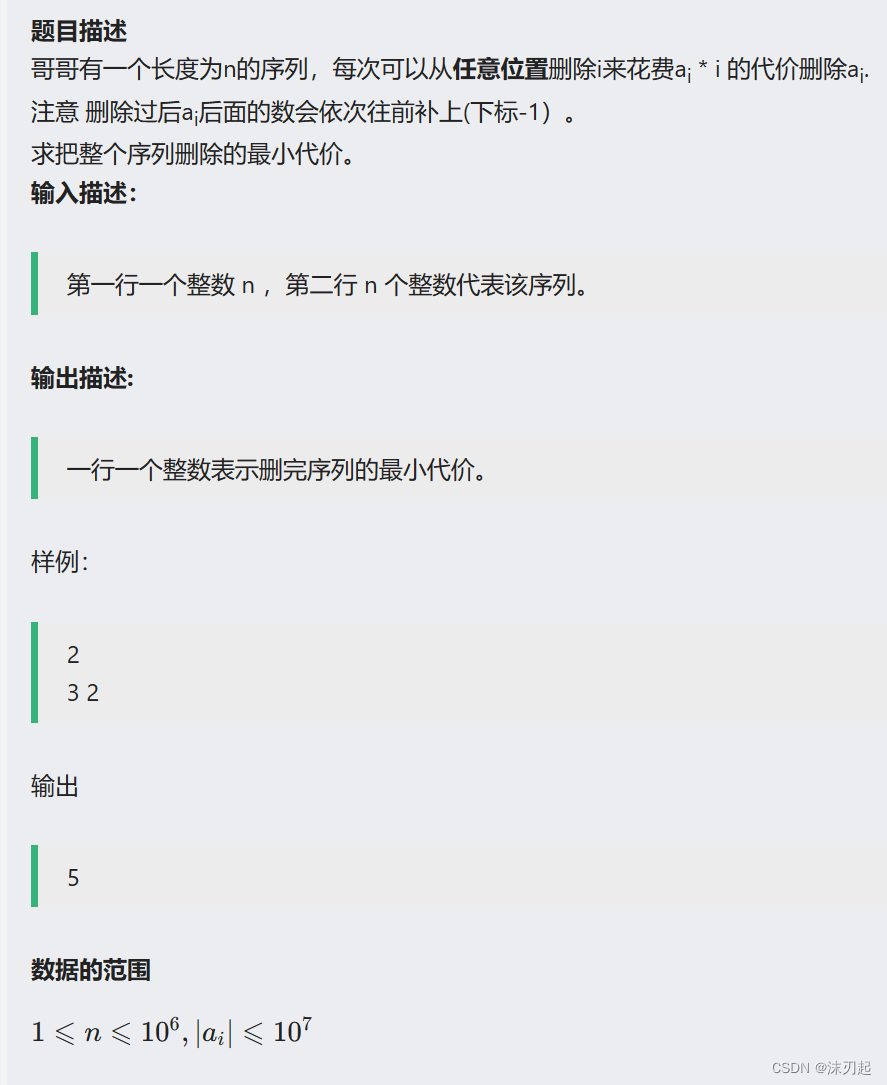
首先看算法是干什么的。
我们假设一种场景,雷达跟踪飞机的运动。我们在各个离散的时间点测量飞机的位置。我们假设知道了飞机在时刻的位置
,要预测它在
时刻的位置
。为什么要预测呢,因为方便我们对它进行跟踪。我们有两种办法得到位置
。
- 我们通过某种经验假设认为飞机符合某种运动规律,比如匀加速运动,也就是说,我们可以建立某种运动模型。这样,假设模型是完美的,那么根据
,我们就可以算出
时刻的位置
。然而,模型里面存在一定的不确定性,里面存在随机的因素,这样,我们就不能准确得到位置
。
- 我们可以直接测量
。然而,测量也存在随机的因素,不能准确测量,因此,
可以看到,我们可以得到真实位置的两个估计,一个是通过运动模型计算出来,一个是测量出来的。而二者都不等于真实位置,而是存在一定的误差。我们接下来的任务是,根据这两个估计来进行某种运算,得到一个最终的、更准确的估计值。
一个最直接的思路是对二者取平均。但是,假设我们知道,我们测量的准确度高于模型的准确度,那么,我们更应该相信测量的值,反之同理。也就是说,我们需要一个加权平均,如下:
转换一下得到:
(1)
那么问题就成了如何选择G,使得我们的估计效果最好,或者说在某种意义下最优。这正是卡尔曼滤波所要完成的任务。
状态空间方程
(一)假设k时刻的状态与k-1时刻的状态
、k-1时刻的控制量
存在如下关系:
(2)
其中,状态就是我们关注的变量,如上面的飞机位置。由于存在多个状态变量,因此它一般是一个向量。控制量则是外界施加的某种作用量,是一个确定的量。A和B都是矩阵。而是过程噪声,用于刻画模型的不确定性。它是一个随机过程,或者说对某个确定的k,它是一个随机变量。
(二)假设k时刻的测量值与k时刻的状态的关系如下:
(3)
其中,是测量噪声,用于刻画测量的不确定性。
估计过程
(一)我们先根据式(2)求出的一个估计:
我们省去了过程噪声,因为它是个随机变量,我们没办法知道它的准确值,所以不考虑它。
称为先验估计,可以理解为一种初步的估计。需要注意的是,
上面也有一个尖尖,它也是一个估计值,因为真实值是永远不知道的。
(二)根据式(3)求出的另一个估计:
这里也省去了测量噪声。
(三)接下来根据式(1),做加权平均:
通常,我们会做个变量代换,令,得到:
其中,称为卡尔曼增益,其实它就是一个权重,用于控制我们对于模型估计量和测量估计量之间的倾向程度。
称为后验估计,也就是我们依据测量值做的进一步估计,是最终的估计值。
卡尔曼增益
接下来,就是要找到一个合适的。我们自然希望
使得估计误差最小,即
最接近于
。估计误差为:
注意,是一个零均值的随机变量,它的方差越小,它就越接近0,
就越接近于
。由于
实际上是一个向量,所以我们的目标就是使得
的协方差矩阵的迹最小,也就是各个方差之和最小。
接下来,先求出的协方差矩阵
,这个过程就不写了,DR_CAN的视频里给出了详细的推导。
的公式看着很复杂,其实涉及到的无非是线性代数和概率论的一些基本知识。
如下:
(4)
其中,是先验估计误差
的协方差矩阵,后面会推导;R是测量噪声
的协方差矩阵,是已知的。
接下来求的迹,并对
求导,令导数=0,就得到最优的
:
(5)
误差的协方差矩阵
式(5)中,目前还不知道。可以求出,
其中,Q是过程噪声的协方差矩阵,也是已知的。
可见,我们还需要求出,用于下一次计算
。我们把式(5)带入到式(4)中,就可以求出:
总体算法流程
于是,我们得到了总的算法流程。
(1)计算先验估计
(2)计算先验误差的协方差矩阵
(3)计算卡尔曼增益
(4)计算后验估计
(5)更新误差协方差矩阵
以上5步不断进行迭代,就是我们根据先验估计和测量值计算后验估计值,来逼近真实值的过程。
在迭代刚开始,需要初始的状态和误差协方差矩阵
。可以以0时刻的测量值作为初始状态。



![【Azure】Azure成本管理:规划、监控、计算和优化成本 [文末送书]](https://img-blog.csdnimg.cn/80bd63a6318e4b308149d39d16a53c0e.jpeg)