首先,智能车的遥控器启动之后,要解除驻车挡位(尾灯不亮红色才可以),然后右上角的那个拨杆是喇叭,对应的左上角的那个拨杆是控制挡位的,包括前进档,后退档。假如是前进,往上拨,这个挡杆的正下方的挡杆应该位于下方,然后拨动右边的挡杆向上拨,此时车子为前进。反之为后退。
1、直接新建一个终端运行roscore
roscore2、打开激光雷达
进入lslidarC16_ws文件夹,打开一个终端
source ~/.bashrc
roslaunch lslidar_c16_decoder lslidar_c16.launch第二行打开的过程如遇问题可以采用tab的方式
3、打开usb摄像头
新建一个终端
roslaunch usb_cam usb_cam-test.launch
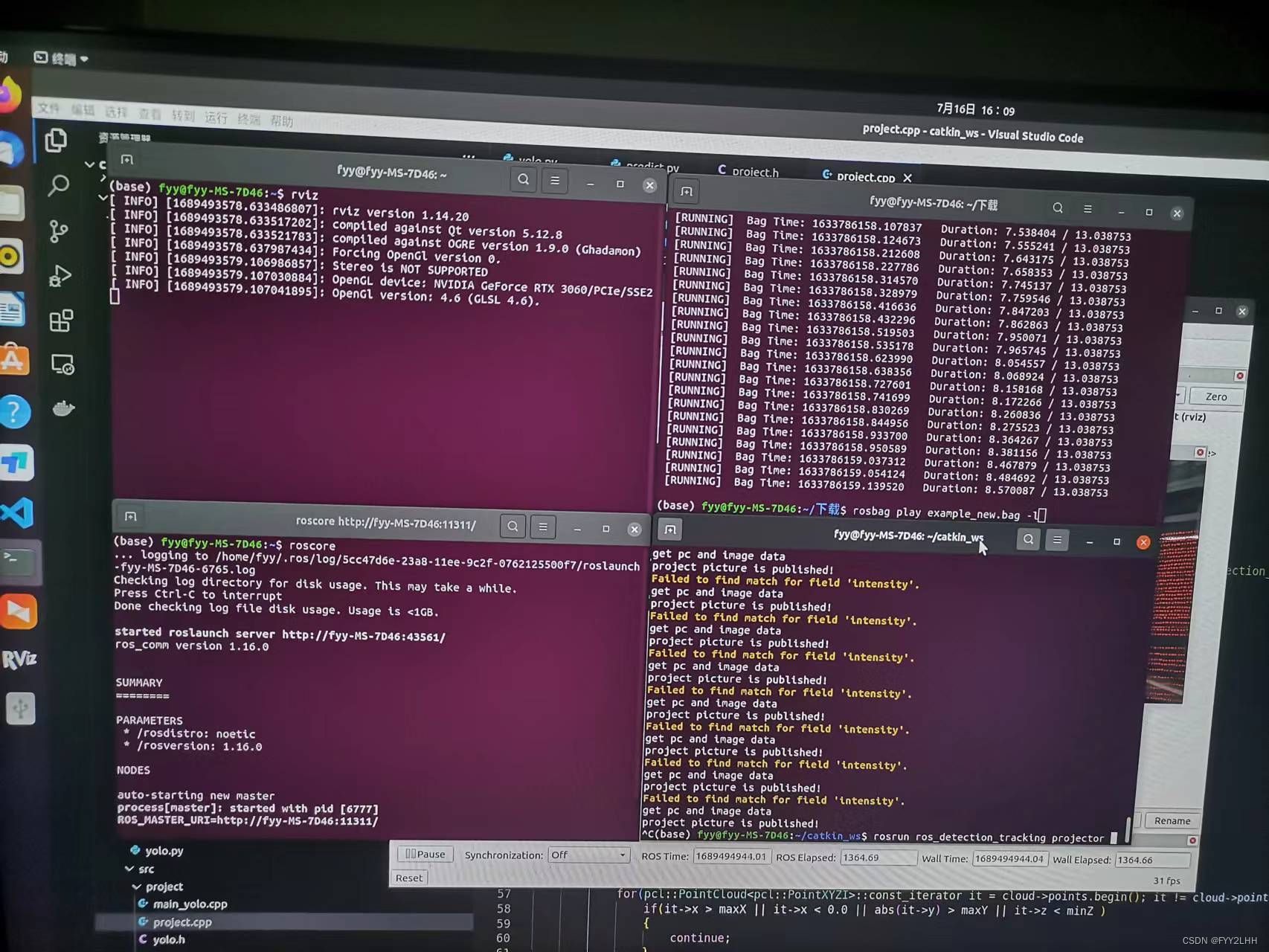
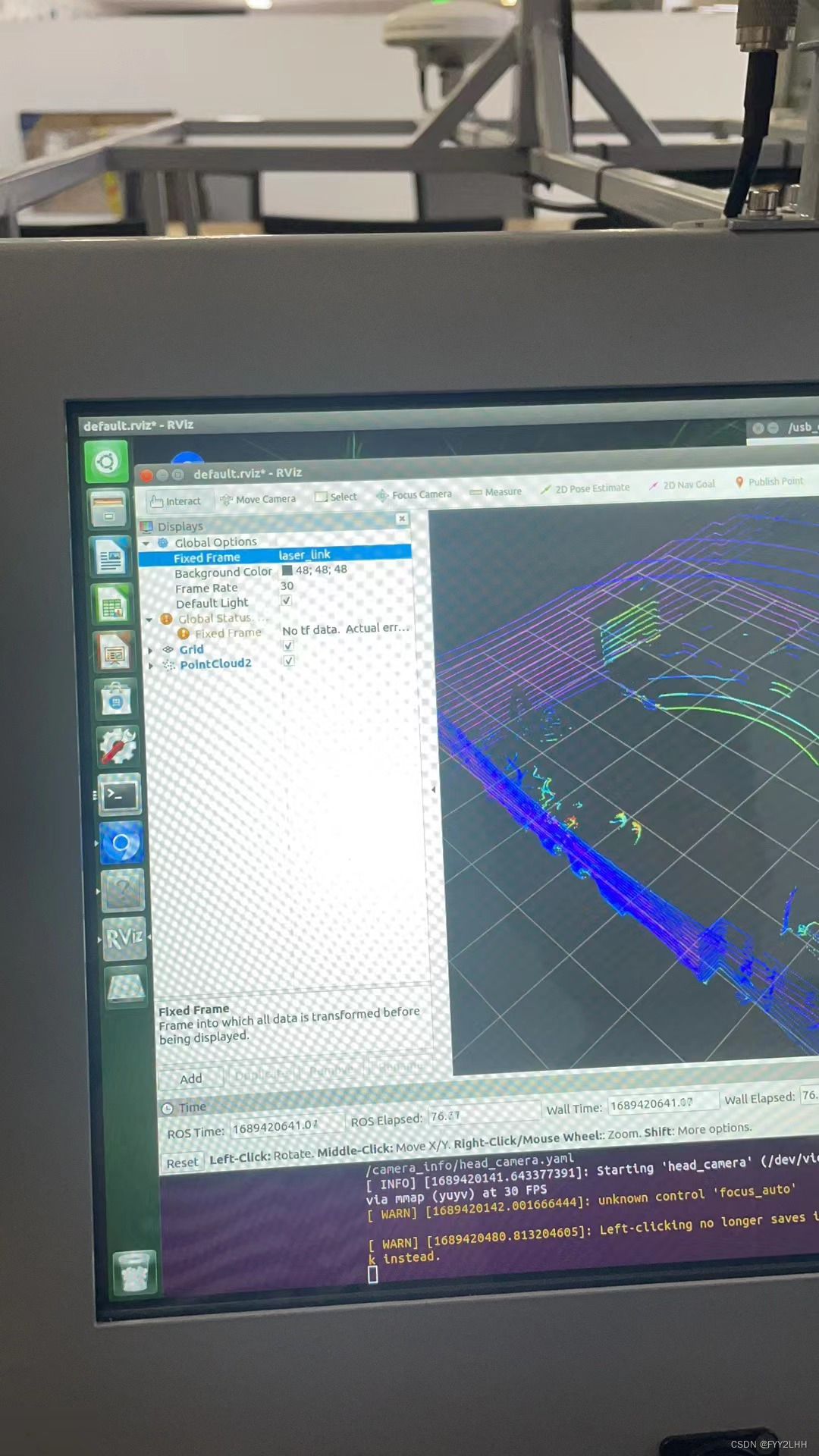
4、新建一个终端打开rviz
rviz5、录制bag
新建一个终端
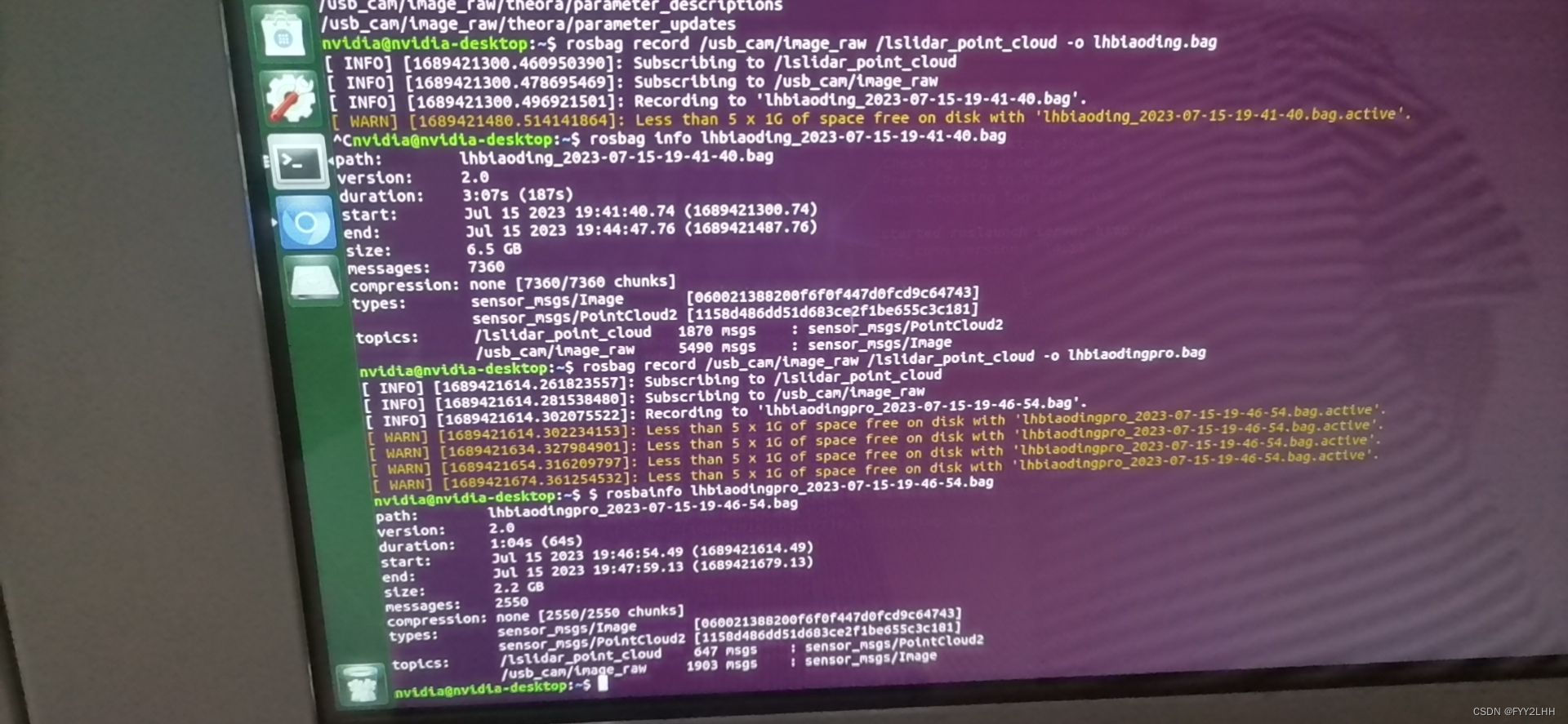
rosbag record /usb_cam/image_raw /lslidar_point_cloud -o name.bag回车即可录制
6、查看第5步录制的bag
rosbag info name(tab一下自己的bag名字)详细过程如下