一、Android相机应用与Surface
Camera应用的预览一般通过SurfaceView去显示,SurfaceView作为显示的载体,
Surface surface = mSurfaceView.getSurfaceHolder().getSurface();获取的surface会通过Camera API1/API2的接口下发到framework层;
Camera应用的拍照在API2里面也是通过surface实现的
ImageReader captureReader = ImageReader.newInstance(width, height, format, maxNum);
Surface surface = captureReader.getSurface();无论预览还是拍照,都是以surface的形式将数据载体下发到framework层。

每个surface会被封装成OutputConfiguration,最后调用createCaptureSession去配流。
二、应用层的Surface下沉到cameraserver
1、首先看两个文件 OutputConfiguration.java; OutputConfiguration.cpp;
![]()
![]()
可以看到这java和cpp里面的OutputConfiguration都继承了Parcelable;这就是一个可序列化的接口,跨进程传递数据用的,所以java的OutputConfiguration最总会解析成cpp的OutputConfiguration。
2、createCaptureSession 调用之后会一直到framework里面的cameraserver模块
frameworks/av/camera/libcameraservice/api2/CameraDeviceClient.cpp
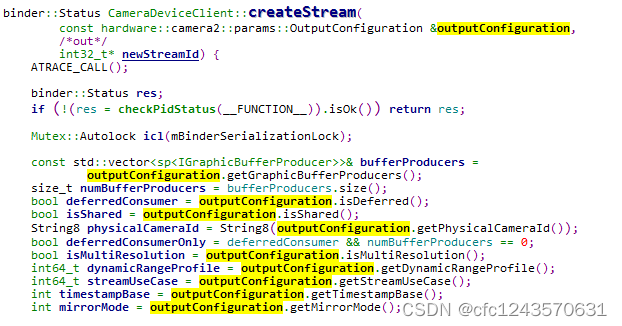
java层的配流会先到CameraDeviceClient里面的 createStream
这里最主要的就是 bufferProducers,bufferProducers就是surface.graphicBufferProducer, surface就是java层的Surface转换而来的native层的Surface(frameworks/native/libs/gui/view/Surface.cpp)
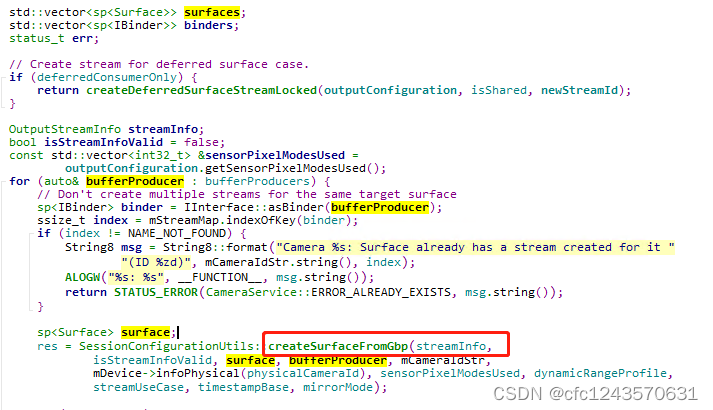
接着通过bufferProducers创建真正的Surface(frameworks/native/libs/gui/Surface.cpp)
以下是 createSurfaceFromGbp的主要内容,不重要的省略了
binder::Status createSurfaceFromGbp(
OutputStreamInfo& streamInfo, bool isStreamInfoValid,
sp<Surface>& surface, const sp<IGraphicBufferProducer>& gbp,
const String8 &logicalCameraId, const CameraMetadata &physicalCameraMetadata,
const std::vector<int32_t> &sensorPixelModesUsed, int64_t dynamicRangeProfile,
int64_t streamUseCase, int timestampBase, int mirrorMode) {
surface = new Surface(gbp, useAsync);
ANativeWindow *anw = surface.get();
int width, height, format;
android_dataspace dataSpace;
if ((err = anw->query(anw, NATIVE_WINDOW_WIDTH, &width)) != OK) {
String8 msg = String8::format("Camera %s: Failed to query Surface width: %s (%d)",
logicalCameraId.string(), strerror(-err), err);
ALOGE("%s: %s", __FUNCTION__, msg.string());
return STATUS_ERROR(CameraService::ERROR_INVALID_OPERATION, msg.string());
}
if ((err = anw->query(anw, NATIVE_WINDOW_HEIGHT, &height)) != OK) {
String8 msg = String8::format("Camera %s: Failed to query Surface height: %s (%d)",
logicalCameraId.string(), strerror(-err), err);
ALOGE("%s: %s", __FUNCTION__, msg.string());
return STATUS_ERROR(CameraService::ERROR_INVALID_OPERATION, msg.string());
}
if ((err = anw->query(anw, NATIVE_WINDOW_FORMAT, &format)) != OK) {
String8 msg = String8::format("Camera %s: Failed to query Surface format: %s (%d)",
logicalCameraId.string(), strerror(-err), err);
ALOGE("%s: %s", __FUNCTION__, msg.string());
return STATUS_ERROR(CameraService::ERROR_INVALID_OPERATION, msg.string());
}
if ((err = anw->query(anw, NATIVE_WINDOW_DEFAULT_DATASPACE,
reinterpret_cast<int*>(&dataSpace))) != OK) {
String8 msg = String8::format("Camera %s: Failed to query Surface dataspace: %s (%d)",
logicalCameraId.string(), strerror(-err), err);
ALOGE("%s: %s", __FUNCTION__, msg.string());
return STATUS_ERROR(CameraService::ERROR_INVALID_OPERATION, msg.string());
}
............
if (!isStreamInfoValid) {
streamInfo.width = width;
streamInfo.height = height;
streamInfo.format = format;
streamInfo.dataSpace = dataSpace;
streamInfo.consumerUsage = consumerUsage;
streamInfo.sensorPixelModesUsed = overriddenSensorPixelModes;
streamInfo.dynamicRangeProfile = dynamicRangeProfile;
streamInfo.streamUseCase = streamUseCase;
streamInfo.timestampBase = timestampBase;
streamInfo.mirrorMode = mirrorMode;
return binder::Status::ok();
}
.....
}3、带着创建好的surface和streaminfo, 继续走createStream流程
err = mDevice->createStream(surfaces, deferredConsumer, streamInfo.width,
streamInfo.height, streamInfo.format, streamInfo.dataSpace,
static_cast<camera_stream_rotation_t>(outputConfiguration.getRotation()),
&streamId, physicalCameraId, streamInfo.sensorPixelModesUsed, &surfaceIds,
outputConfiguration.getSurfaceSetID(), isShared, isMultiResolution,
/*consumerUsage*/0, streamInfo.dynamicRangeProfile, streamInfo.streamUseCase,
streamInfo.timestampBase, streamInfo.mirrorMode);提前说一下,这里的surface对应的buffer就是我们以后下发request给HAL层带下去的buffer;所以所谓的buffer不是应用层直接创建的,是在cameraserver里面创建的
frameworks/av/camera/libcameraservice/device3/Camera3Device.cpp
createStream主要就是创建 Camera3OutputStream 对象,这里的consumers就是上面创建的Surface也被带到了Camera3OutputStream里面;Camera3OutputStream可以简单理解成管理数据输出buffer的。
status_t Camera3Device::createStream(const std::vector<sp<Surface>>& consumers,
bool hasDeferredConsumer, uint32_t width, uint32_t height, int format,
android_dataspace dataSpace, camera_stream_rotation_t rotation, int *id,
const String8& physicalCameraId, const std::unordered_set<int32_t> &sensorPixelModesUsed,
std::vector<int> *surfaceIds, int streamSetId, bool isShared, bool isMultiResolution,
uint64_t consumerUsage, int64_t dynamicRangeProfile, int64_t streamUseCase,
int timestampBase, int mirrorMode) {
sp<Camera3OutputStream> newStream;
if (format == HAL_PIXEL_FORMAT_BLOB) {
ssize_t blobBufferSize;
if (dataSpace == HAL_DATASPACE_DEPTH) {
blobBufferSize = getPointCloudBufferSize(infoPhysical(physicalCameraId));
if (blobBufferSize <= 0) {
SET_ERR_L("Invalid point cloud buffer size %zd", blobBufferSize);
return BAD_VALUE;
}
} else if (dataSpace == static_cast<android_dataspace>(HAL_DATASPACE_JPEG_APP_SEGMENTS)) {
blobBufferSize = width * height;
} else {
blobBufferSize = getJpegBufferSize(infoPhysical(physicalCameraId), width, height);
if (blobBufferSize <= 0) {
SET_ERR_L("Invalid jpeg buffer size %zd", blobBufferSize);
return BAD_VALUE;
}
}
newStream = new Camera3OutputStream(mNextStreamId, consumers[0],
width, height, blobBufferSize, format, dataSpace, rotation,
mTimestampOffset, physicalCameraId, sensorPixelModesUsed, transport, streamSetId,
isMultiResolution, dynamicRangeProfile, streamUseCase, mDeviceTimeBaseIsRealtime,
timestampBase, mirrorMode);
} else if (format == HAL_PIXEL_FORMAT_RAW_OPAQUE) {
bool maxResolution =
sensorPixelModesUsed.find(ANDROID_SENSOR_PIXEL_MODE_MAXIMUM_RESOLUTION) !=
sensorPixelModesUsed.end();
ssize_t rawOpaqueBufferSize = getRawOpaqueBufferSize(infoPhysical(physicalCameraId), width,
height, maxResolution);
if (rawOpaqueBufferSize <= 0) {
SET_ERR_L("Invalid RAW opaque buffer size %zd", rawOpaqueBufferSize);
return BAD_VALUE;
}
newStream = new Camera3OutputStream(mNextStreamId, consumers[0],
width, height, rawOpaqueBufferSize, format, dataSpace, rotation,
mTimestampOffset, physicalCameraId, sensorPixelModesUsed, transport, streamSetId,
isMultiResolution, dynamicRangeProfile, streamUseCase, mDeviceTimeBaseIsRealtime,
timestampBase, mirrorMode);
} else if (isShared) {
newStream = new Camera3SharedOutputStream(mNextStreamId, consumers,
width, height, format, consumerUsage, dataSpace, rotation,
mTimestampOffset, physicalCameraId, sensorPixelModesUsed, transport, streamSetId,
mUseHalBufManager, dynamicRangeProfile, streamUseCase, mDeviceTimeBaseIsRealtime,
timestampBase, mirrorMode);
} else if (consumers.size() == 0 && hasDeferredConsumer) {
newStream = new Camera3OutputStream(mNextStreamId,
width, height, format, consumerUsage, dataSpace, rotation,
mTimestampOffset, physicalCameraId, sensorPixelModesUsed, transport, streamSetId,
isMultiResolution, dynamicRangeProfile, streamUseCase, mDeviceTimeBaseIsRealtime,
timestampBase, mirrorMode);
} else {
newStream = new Camera3OutputStream(mNextStreamId, consumers[0],
width, height, format, dataSpace, rotation,
mTimestampOffset, physicalCameraId, sensorPixelModesUsed, transport, streamSetId,
isMultiResolution, dynamicRangeProfile, streamUseCase, mDeviceTimeBaseIsRealtime,
timestampBase, mirrorMode);
}
newStream->setStatusTracker(mStatusTracker);
newStream->setBufferManager(mBufferManager);
newStream->setImageDumpMask(mImageDumpMask);
res = mOutputStreams.add(mNextStreamId, newStream);
mSessionStatsBuilder.addStream(mNextStreamId);
*id = mNextStreamId++;
mNeedConfig = true;
return OK;
}Camera3OutputStream::Camera3OutputStream(int id,
sp<Surface> consumer,
uint32_t width, uint32_t height, int format,
android_dataspace dataSpace, camera_stream_rotation_t rotation,
nsecs_t timestampOffset, const String8& physicalCameraId,
const std::unordered_set<int32_t> &sensorPixelModesUsed, IPCTransport transport,
int setId, bool isMultiResolution, int64_t dynamicRangeProfile,
int64_t streamUseCase, bool deviceTimeBaseIsRealtime, int timestampBase,
int mirrorMode) :
Camera3IOStreamBase(id, CAMERA_STREAM_OUTPUT, width, height,
/*maxSize*/0, format, dataSpace, rotation,
physicalCameraId, sensorPixelModesUsed, setId, isMultiResolution,
dynamicRangeProfile, streamUseCase, deviceTimeBaseIsRealtime,
timestampBase),
mConsumer(consumer), // 至此,Surface已经交到了Stream
mTransform(0),
mTraceFirstBuffer(true),
mUseBufferManager(false),
mTimestampOffset(timestampOffset),
mConsumerUsage(0),
mDropBuffers(false),
mMirrorMode(mirrorMode),
mDequeueBufferLatency(kDequeueLatencyBinSize),
mIPCTransport(transport) {
}4、buffer算是已经创建好了,也给了Camera3OutputStream了,下面就要看buffer怎么拿出来使用了,那就到了下发request的阶段了。
在Camera3Device里面有一个内部线程 是RequestThread,该线程一直在不停的发送request给Hal层(以前经常有hal的同事说应用下发request慢了,导致预览卡顿,其实不是应用不停地下发request,应用只在参数主动改变的时候才会下发request)。下面是该线程的两个主要内容,我们主要看buffer怎么弄的,下发request就不详细跟下去了。
bool Camera3Device::RequestThread::threadLoop() {
res = prepareHalRequests(); // 准备request, 包括output_buffer
bool submitRequestSuccess = false;
submitRequestSuccess = sendRequestsBatch(); // 下发Request
return submitRequestSuccess;
}status_t Camera3Device::RequestThread::prepareHalRequests() {
......
res = outputStream->getBuffer(&outputBuffers->editItemAt(j),
waitDuration,
captureRequest->mOutputSurfaces[streamId]);
......
}status_t Camera3Stream::getBuffer(camera_stream_buffer *buffer,
nsecs_t waitBufferTimeout,
const std::vector<size_t>& surface_ids) {
res = getBufferLocked(buffer, surface_ids);
return res;
}status_t Camera3OutputStream::getBufferLocked(camera_stream_buffer *buffer,
const std::vector<size_t>&) {
ANativeWindowBuffer* anb;
int fenceFd = -1;
status_t res;
res = getBufferLockedCommon(&anb, &fenceFd);
handoutBufferLocked(*buffer, &(anb->handle), /*acquireFence*/fenceFd,
/*releaseFence*/-1, CAMERA_BUFFER_STATUS_OK, /*output*/true);
return OK;
}status_t Camera3OutputStream::getBufferLockedCommon(ANativeWindowBuffer** anb, int* fenceFd) {
if (!gotBufferFromManager) {
sp<Surface> consumer = mConsumer;
if (batchSize == 1) {
sp<ANativeWindow> anw = consumer;
res = anw->dequeueBuffer(anw.get(), anb, fenceFd);
}
}
}handoutBufferLocked 里面主要就是buffer.buffer = handle赋值了。
void Camera3IOStreamBase::handoutBufferLocked(camera_stream_buffer &buffer,
buffer_handle_t *handle,
int acquireFence,
int releaseFence,
camera_buffer_status_t status,
bool output) {
incStrong(this);
buffer.stream = this;
buffer.buffer = handle;
buffer.acquire_fence = acquireFence;
buffer.release_fence = releaseFence;
buffer.status = status;
}至此,cameraserver里面的buffer由来已经完成