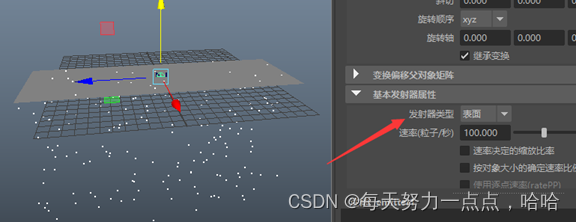
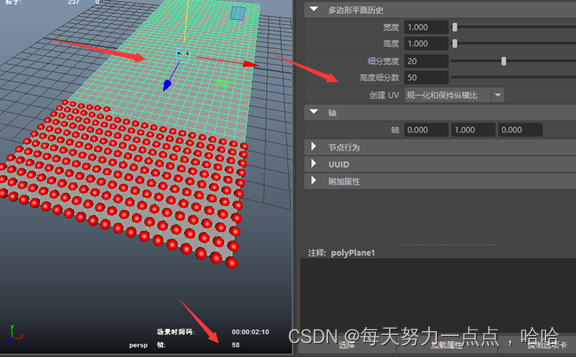
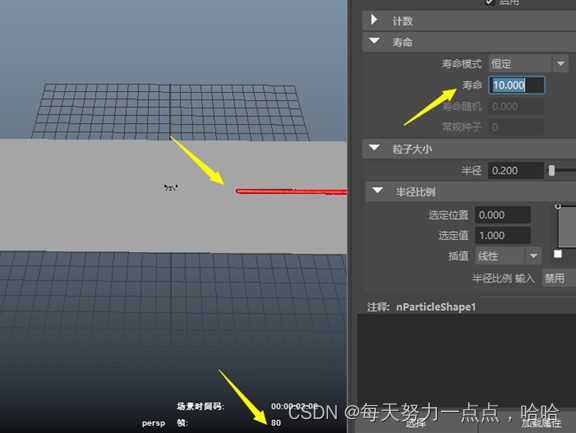
一下就填充到点

一个一个点填充
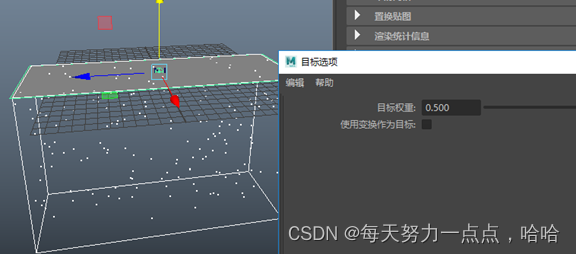
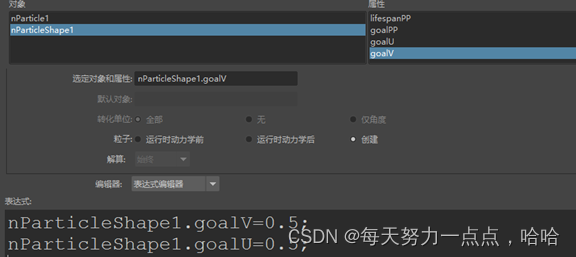
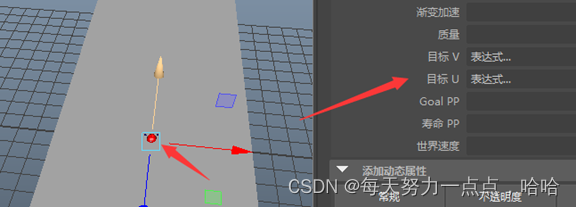
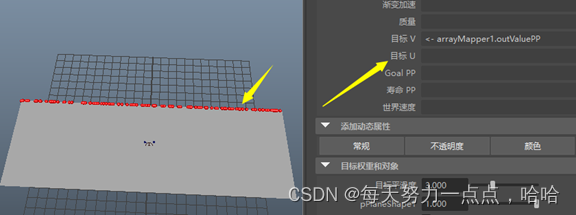
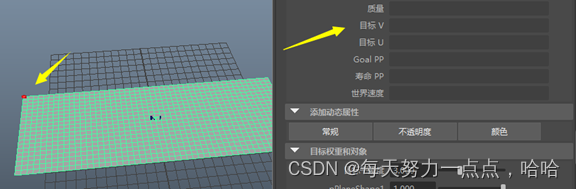
nParticleShape1.goalV=0.5;
nParticleShape1.goalU=0.5;
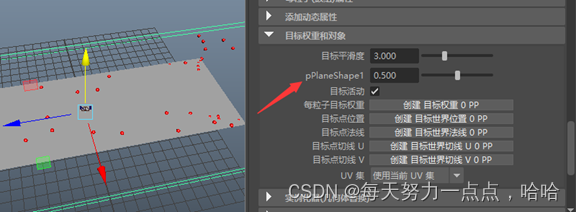
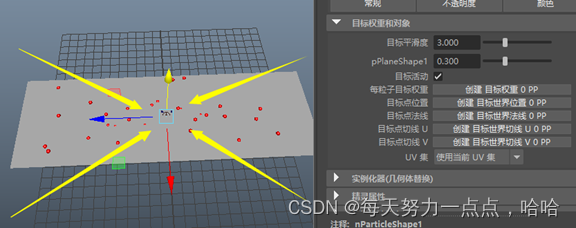
粒子向中心移动
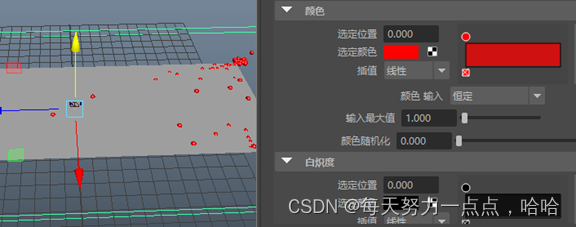
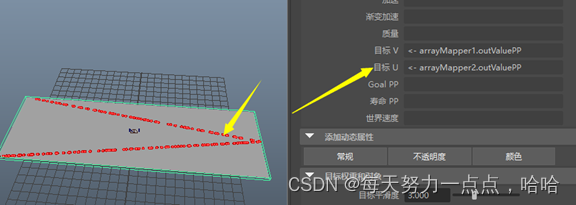
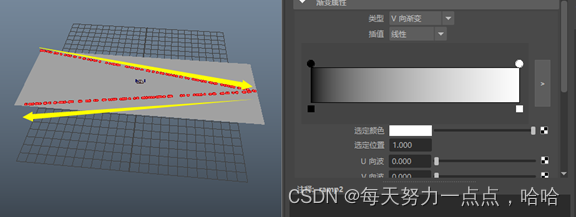
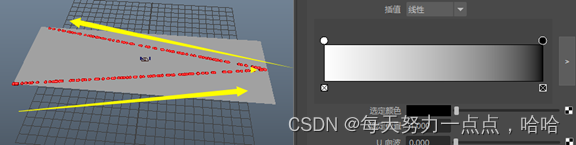
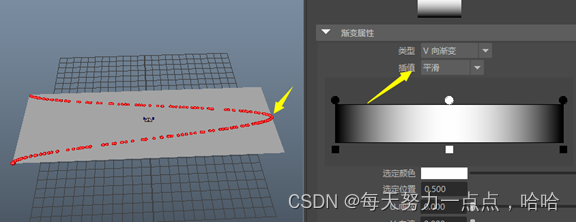
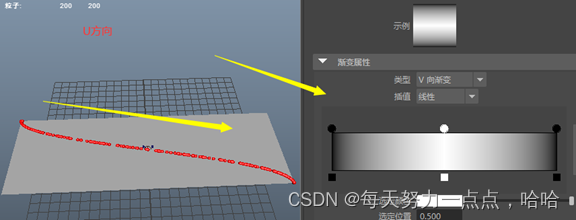
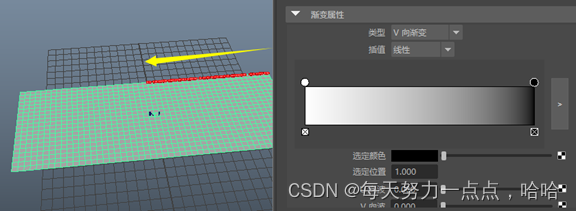
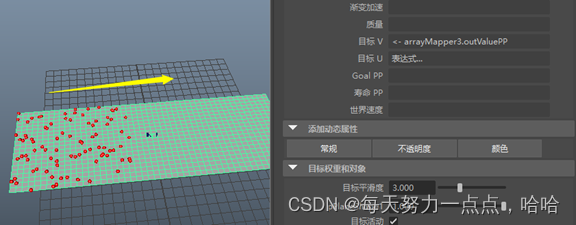
V方向使用渐变
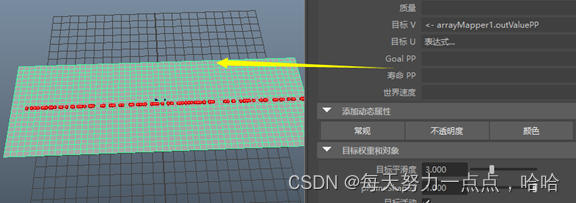
删除U方向表达式
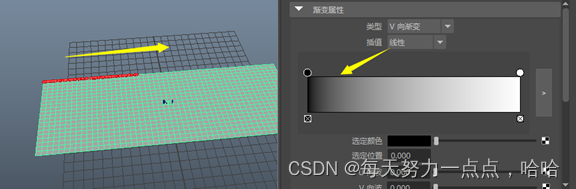
也使用渐变
使用圆角

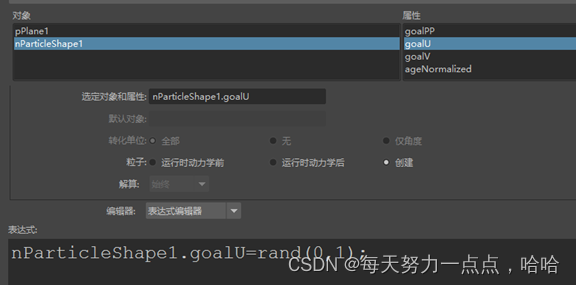
nParticleShape1.goalU=rand(0,1);
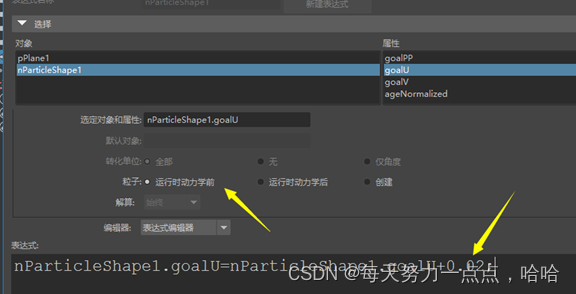
nParticleShape1.goalU=nParticleShape1.goalU+0.02;
nParticleShape1.goalU=nParticleShape1.goalU+sin(time)*0.02;

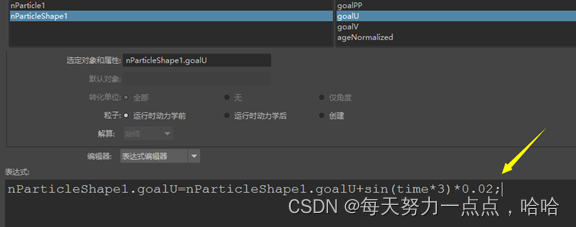
nParticleShape1.goalU=nParticleShape1.goalU+sin(time*3)*0.02;
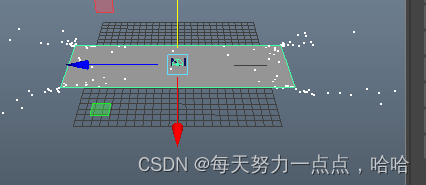
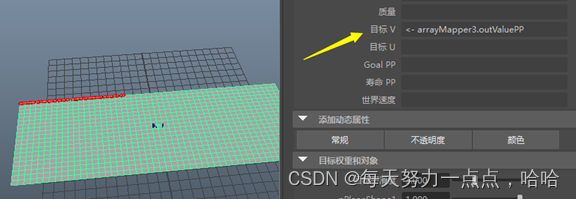
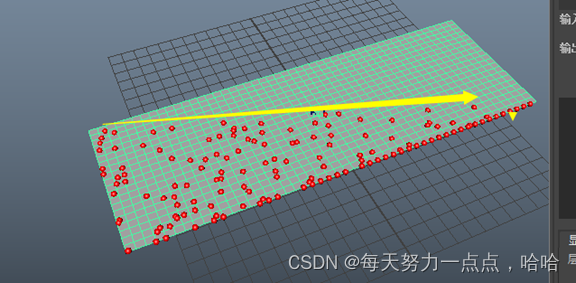
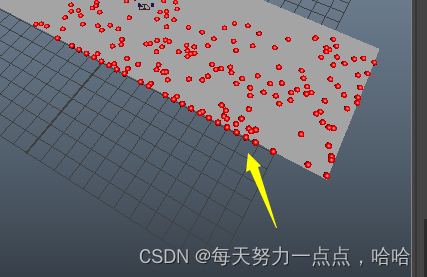
粒子贴边
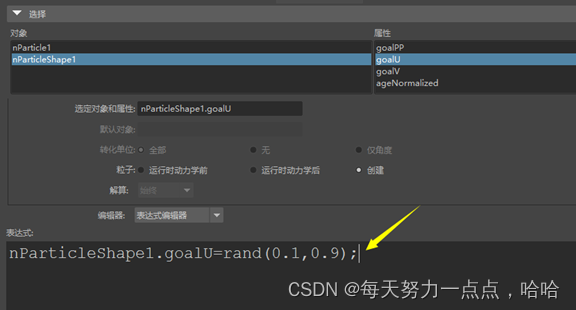
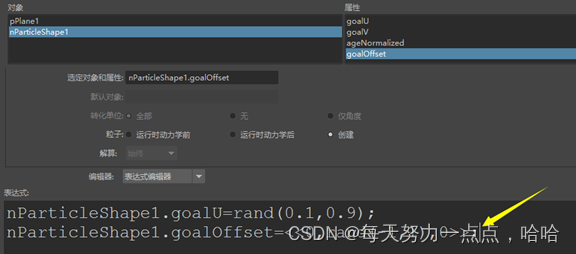
nParticleShape1.goalU=rand(0.1,0.9);
nParticleShape1.goalU=nParticleShape1.goalU+sin(time*3)*0.008;

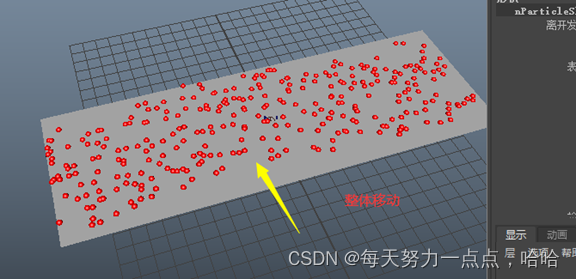
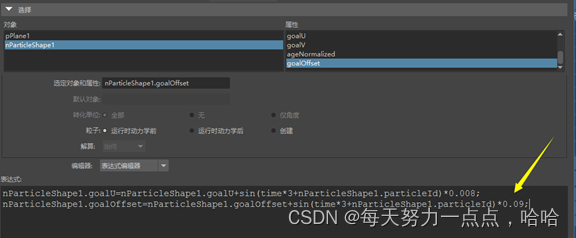
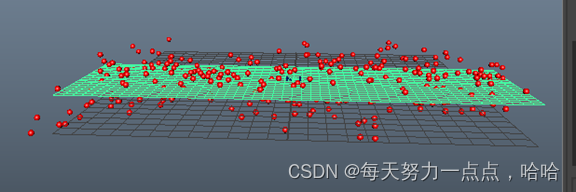
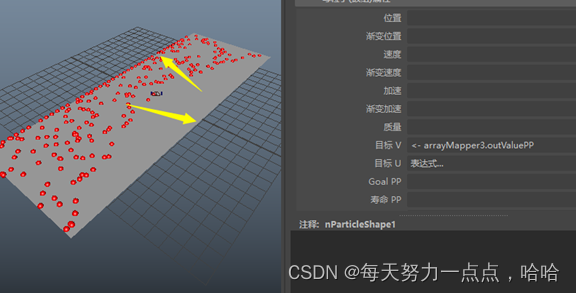
各个粒子移动
nParticleShape1.goalU=nParticleShape1.goalU+sin(time*3+nParticleShape1.particleId)*0.008;

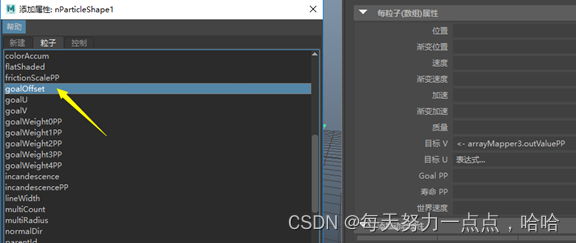
nParticleShape1.goalOffset=<<0,rand(-1,1),0>>;
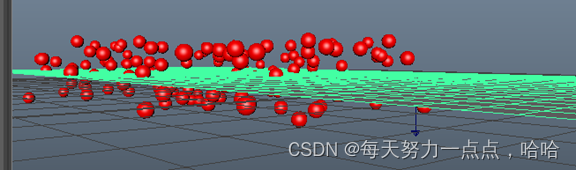
nParticleShape1.goalOffset=nParticleShape1.goalOffset+sin(time*3+nParticleShape1.particleId)*0.09;