飞控仿真是一种在计算机模拟环境中对飞行控制系统进行测试和验证的方法。它通过使用仿真软件和工具来模拟飞行器的物理行为、传感器数据和控制算法的执行,以评估飞行控制系统的性能和稳定性。
原理
- 物理模型:仿真软件使用物理模型来描述飞行器的运动行为。这些模型基于飞行力学和动力学原理,考虑了飞行器的质量、气动特性和外部环境条件等因素。
- 控制算法:仿真软件执行控制算法,计算控制指令,并模拟控制器对飞行器的响应。这包括姿态控制、位置控制、导航算法等,根据输入信号和传感器数据进行控制指令的生成和执行。
- 传感器模拟:仿真软件模拟飞行器的传感器数据,如陀螺仪、加速度计、气压计等。这些模拟数据用于控制算法的输入,以模拟实际飞行中传感器的反馈。
意义
- 安全性评估:飞行控制系统的仿真可以帮助评估飞行器的安全性能。通过模拟各种飞行情况和异常情况,可以检测和纠正潜在的安全问题,减少实际飞行中的风险。
- 性能优化:仿真可以用于调试和优化飞行控制算法。通过对不同算法和参数进行仿真测试,可以评估控制系统的稳定性、精度和鲁棒性,并找到最佳的控制参数设置。
- 系统集成和验证:飞控仿真可用于系统集成和验证。在实际硬件和软件组件之前,通过仿真测试和验证整个飞行控制系统的功能和互操作性,以确保系统的正确性和一致性。
- 成本效益:仿真比实际飞行成本低廉,可以减少开发周期和资源投入。它提供了一个快速、安全和经济的方法来评估和改进飞行控制系统,提高设计效率和可靠性。
飞控仿真是一种重要的工具,可以帮助工程师评估、优化和验证飞行控制系统。它提供了一个虚拟的环境,以在风险较低和成本较低的情况下进行系统开发和改进。通过仿真,可以提高飞行器的性能、安全性和可靠性,并加速飞行控制系统的设计和部署过程。
进行飞控的仿真可以通过以下步骤来实现:
-
选择仿真软件:选择适合飞控仿真的软件平台。一些常用的飞控软件包括PX4、ArduPilot和ROS(Robot Operating System)等,都包含仿真模块。比较常用的上位机仿真软件有FlightGear、Gazebo等,这些软件提供了强大的飞行控制仿真功能和工具。
-
搭建仿真环境:在仿真软件中创建适当的飞行环境。可以选择不同的场景、天气条件和飞行器类型,以便进行各种仿真测试。确保设置正确的飞行器参数和环境参数。
-
设计飞行控制算法:根据飞行控制的需求和目标,设计飞行控制算法。这可能涉及姿态控制、位置控制、导航算法等方面。根据选择的仿真软件,编写适当的代码或配置文件来实现飞行控制算法。
-
配置仿真参数:在仿真软件中配置飞行控制器和仿真参数。设置飞行器的物理特性、传感器模型、控制器参数等。确保仿真设置与实际硬件设备相匹配。
-
运行仿真:启动飞行控制仿真并运行仿真场景。仿真软件将模拟飞行器的运动、传感器数据和控制器的反馈。可以观察飞行器在仿真环境中的行为和性能。
-
仿真数据分析:通过仿真数据分析工具,对仿真结果进行评估和分析。可以检查飞行器的稳定性、姿态控制性能、导航准确性等指标,以评估飞行控制算法的有效性。
-
优化和调试:根据仿真结果,优化和调试飞行控制算法。根据需要,进行参数调整、算法改进和测试,以提高飞行控制的性能和稳定性。
仿真软件
针对飞行控制的仿真,有一些常用的仿真平台和工具可供选择,例如:
FlightGear
FlightGear是一款开源的飞行模拟软件,它提供了一个逼真的飞行环境,用于模拟飞机和直升机的飞行体验。FlightGear由全球志愿者团队开发,是一个多平台支持的软件,可以在Windows、Mac和Linux等操作系统上运行。
以下是FlightGear的一些特点和功能:
-
逼真的飞行模拟:FlightGear通过先进的飞行动力学模型和物理引擎,提供高度逼真的飞行模拟体验。它模拟了飞行器的飞行特性、控制响应、气动效应、发动机动力学等多个方面,使飞行体验更加真实和准确。
-
多种飞行器模型:FlightGear支持多种不同类型的飞行器模型,包括商用飞机、军用飞机、通用航空飞机、直升机等。用户可以选择自己喜欢的飞行器进行模拟飞行,并可以根据需要进行飞行器的配置和调整。
-
多样化的地景和场景:FlightGear提供了全球范围的地景数据,包括地形、地标、城市、机场等。用户可以在各种不同的地区和环境中飞行,体验不同地域的风光和景观。
-
开放式架构和可扩展性:FlightGear采用开放式架构,允许用户进行自定义和扩展。用户可以根据自己的需求添加新的飞行器模型、地景数据、航路点等,还可以开发自己的飞行仪表、控制系统等。
-
多种控制方式:FlightGear支持多种不同的控制方式,包括键盘、鼠标、摇杆、游戏手柄等。用户可以根据自己的喜好和设备选择适合的控制方式,并进行个性化的设置和调整。
FlightGear不仅是一个功能强大的飞行模拟软件,也是一个活跃的社区和开发平台。它提供了丰富的文档和教程,帮助用户了解飞行模拟的基础知识和技巧,并与其他用户和开发者进行交流和分享。FlightGear的开源性质使得用户可以自由地使用、修改和分发软件,从而为模拟飞行爱好者和专业飞行员提供了一个开放和创新的平台。
Gazebo
Gazebo是一个用于机器人和无人系统仿真的开源软件,可模拟多种机器人类型,包括无人机。它提供了物理引擎、传感器模拟和控制接口,可用于飞行控制算法的仿真和验证。Gazebo由Open Source Robotics Foundation(OSRF)开发和维护,并得到了广泛的应用和支持。
以下是Gazebo的一些特点和功能:
-
强大的物理引擎:Gazebo使用ODE(Open Dynamics Engine)和Bullet等物理引擎,可以模拟真实世界中的物理行为,包括刚体动力学、碰撞检测、摩擦力等。这使得仿真场景更加真实和准确。
-
多机器人协同仿真:Gazebo支持多个机器人和传感器的同时仿真,可以模拟多个机器人之间的协作和交互。这使得用户可以测试和验证分布式控制系统、协同任务和传感器网络等。
-
多样化的传感器模型:Gazebo提供了各种常见的传感器模型,包括相机、激光雷达、GPS、惯性测量单元(IMU)等。这些传感器模型具有高度可配置性,可以模拟不同分辨率、视角、噪声和延迟等特性。
-
可视化工具和界面:Gazebo提供了直观的可视化界面和工具,使用户可以观察和分析仿真过程。用户可以查看机器人的状态、传感器数据、物体位置等,并进行实时调试和交互。
-
可扩展性和定制性:Gazebo具有高度可扩展性,用户可以根据自己的需求添加新的模型、传感器、控制器等。它还支持ROS(Robot Operating System),可以与ROS结合使用,进行更复杂的机器人系统仿真和开发。
Gazebo广泛应用于机器人研究、无人系统开发、自动驾驶系统测试等领域。它提供了一个安全、经济和便捷的平台,用于验证和改进机器人算法、控制系统和感知系统等关键功能。通过Gazebo,用户可以在仿真环境中进行各种实验和场景测试,从而加速机器人系统的开发和部署过程。
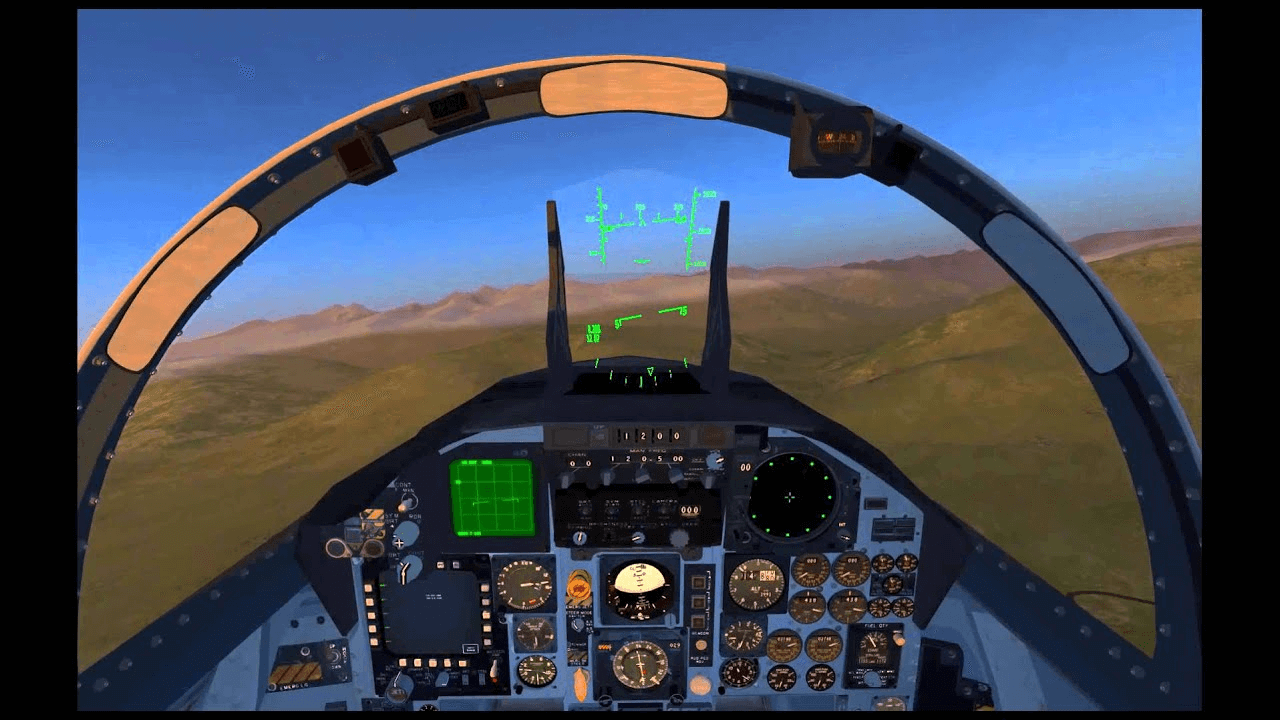
X-Plane
X-Plane是一款功能强大的飞行模拟软件,旨在提供高度逼真的飞行体验。它由Laminar Research开发和发布,是一款跨平台的软件,可以在Windows、Mac和Linux等操作系统上运行。
以下是X-Plane的一些特点和功能:
-
逼真的飞行模拟:X-Plane采用先进的飞行模型和物理引擎,以精确的数学模型模拟飞行器的飞行特性和动力学行为。它考虑了多种因素,如空气动力学、惯性、引擎动力学、控制响应等,使飞行体验更加真实和准确。
-
多种飞行器模型:X-Plane提供了广泛的飞行器模型供用户选择,包括商用飞机、通用航空飞机、直升机、军用飞机等。每个飞行器模型都经过详细建模,包括外观、仪表板、系统模拟等,以尽可能地还原真实飞行器的特性。
-
全球地景和天气模拟:X-Plane提供了全球范围的地景数据,包括地形、建筑物、机场等。它还模拟了实时天气和季节变化,包括风、云、降雨等,使飞行环境更加真实和具有挑战性。
-
强大的自定义和扩展性:X-Plane支持用户进行自定义和扩展。用户可以添加自己的飞行器模型、地景数据、航路点等,还可以开发自己的飞行仪表、插件和脚本。这使得用户可以根据自己的需求和兴趣创建个性化的飞行体验。
-
多种控制方式和设备支持:X-Plane支持多种不同的控制方式,包括键盘、鼠标、摇杆、游戏手柄等。它还与各种硬件设备兼容,如飞行杆、油门控制器、多屏显示系统等,以提供更真实和沉浸式的飞行体验。
X-Plane的应用领域广泛,包括飞行员培训、飞行器设计和测试、航空研究等。它被许多飞行学校和航空公司用作飞行员培训的工具,因为其高度逼真的模拟能力可以有效地提高飞行技能和决策能力。同时,X-Plane也是模型飞行爱好者和航
空爱好者的首选,他们可以在模拟环境中体验飞行的乐趣,并进行各种飞行任务和挑战。
MATLAB/Simulink
Simulink是一种基于图形化模型的仿真环境和开发工具,由MathWorks开发和发布。它是MATLAB软件的一部分,专门用于模拟和建模动态系统,包括控制系统、信号处理系统、通信系统等。
以下是Simulink的一些特点和功能:
-
图形化建模:Simulink使用图形化界面,通过拖放和连接不同的模块来构建系统模型。这种图形化建模方法直观而易于使用,使用户能够快速搭建复杂的系统模型。
-
多领域仿真:Simulink支持多个领域的仿真,包括控制系统、信号处理、通信、电力系统等。它提供了各种模块库和工具箱,用于建模和仿真不同领域的系统。
-
高度可配置性:Simulink的模块库包含了丰富的预定义模块,用于建模系统的各个方面,如信号生成、滤波、控制算法等。用户可以根据自己的需求进行模块的配置和参数调整,以满足具体的仿真要求。
-
仿真和分析工具:Simulink提供了强大的仿真和分析工具,用于验证和调试系统模型。用户可以进行时间域仿真、频域分析、参数优化等操作,以评估系统性能和设计优化。
-
与MATLAB的集成:Simulink与MATLAB紧密集成,用户可以在Simulink模型中使用MATLAB函数和脚本,实现更高级的算法和处理。这种无缝的集成使得Simulink具有更大的灵活性和扩展性。
Simulink广泛应用于工程和科学领域,用于设计和验证各种动态系统的行为和性能。它被用于开发和测试控制系统、信号处理算法、通信协议、图像处理算法等。同时,Simulink还支持硬件代码生成和实时仿真,使用户能够将模型部署到嵌入式系统和实时控制平台上,可以用于建立飞行控制系统的仿真模型,并进行系统级仿真和控制算法开发。
AirSim
AirSim是一款由Microsoft开发的开源仿真平台,用于无人机和自动驾驶系统的开发和测试。它提供了一个高度可定制的仿真环境,用于模拟无人机的飞行和感知,以及评估和验证自动驾驶算法和系统。
以下是AirSim的一些特点和功能:
-
高度逼真的仿真环境:AirSim提供了真实世界的地形和场景数据,包括城市、农村、山区等。这些地形数据是基于真实地图和卫星图像构建的,使得仿真环境更加逼真和精细。
-
多种无人机模型:AirSim支持多种常见的无人机模型,包括四旋翼、六旋翼、固定翼等。每个无人机模型都经过详细建模,包括外观、动力学特性、传感器模拟等,以提供准确的飞行体验。
-
丰富的传感器模拟:AirSim提供了多种传感器模拟,包括RGB相机、深度相机、激光雷达等。这些传感器模拟具有高度可配置性,可以模拟不同分辨率、视角、噪声和延迟等特性,以满足不同应用的需求。
-
支持多种开发平台:AirSim可以与多种开发平台和框架集成,包括ROS(Robot Operating System)、Unity、Unreal Engine等。这使得用户可以根据自己的喜好和需求选择合适的开发环境进行算法和系统开发。
-
开放的API和工具:AirSim提供了丰富的API和工具,用于控制无人机、接收传感器数据、进行数据记录和分析等。用户可以编写自己的控制算法和应用程序,与仿真环境进行交互。
AirSim广泛应用于无人机和自动驾驶系统的研究、开发和测试。它提供了一个安全、经济和高度可控的仿真平台,用于验证和改进无人机的控制算法、感知系统和决策策略。通过AirSim,用户可以在仿真环境中进行各种场景和情境的测试,从而提高系统的鲁棒性、安全性和性能。
XTDrone
XTDrone是基于PX4、ROS与Gazebo的无人机通用仿真平台。支持多旋翼飞行器(包含四轴和六轴)、固定翼飞行器、复合翼飞行器(包含quadplane,tailsitter和tiltrotor)与其他无人系统(如无人车、无人船与机械臂)。在XTDrone上验证过的算法,可以方便地部署到真实无人机上。值得主要的是,这是一个国内开发者发起的开源项目,从简介上看主要用于运动规划,而不是飞控算法仿真。
RealFlight
RealFlight是一款非常受欢迎的遥控飞行模拟器,由Knife Edge Software开发和发布。它是一款专业级的模拟器,旨在提供真实且令人兴奋的遥控飞行体验。
以下是RealFlight的一些主要特点和功能:
-
逼真的飞行物理模型:RealFlight采用了先进的飞行物理模型,以模拟真实飞行器的运动和飞行特性。它考虑了飞行器的重量、气动特性、动力系统等因素,使得飞行在模拟器中表现得非常逼真。
-
多种飞行器模型:RealFlight提供了多种飞行器模型,包括直升机、固定翼飞机、多旋翼飞机等。每个模型都经过精心设计和建模,以尽可能地还原真实飞行器的外观和性能。
-
多种场景和地点:RealFlight提供了多种场景和地点,包括不同的飞行场、景点和竞技场。用户可以选择自己喜欢的场景,进行自由飞行、竞速比赛和特技飞行等。
-
多种飞行模式:RealFlight支持多种飞行模式,包括自由飞行、训练模式、竞速模式等。用户可以根据自己的技能和喜好选择不同的模式,进行飞行训练和挑战。
-
丰富的训练和学习工具:RealFlight提供了丰富的训练和学习工具,帮助新手学习飞行技巧和掌握操作技巧。这些工具包括飞行指导、模拟教练、训练任务等,可根据用户的能力和需求进行个性化设置。
-
可定制和扩展性:RealFlight具有高度的可定制性和扩展性。用户可以通过添加额外的飞行器模型、场景和飞行器配件来扩展软件的功能和内容。此外,RealFlight还支持自定义的飞行器和场景编辑,让用户能够创建自己的飞行体验。
RealFlight广泛应用于遥控飞行爱好者和专业飞行员之间的训练和娱乐。它提供了一个安全和经济的环境,让用户能够练习和掌握飞行技巧,同时也是开展飞行器测试和开发的重要工具。无论是新手还是经验丰富的飞行员,RealFlight都为他们提供了一个高质量的模拟飞行体验。
这些仿真平台和工具提供了强大的功能,可以进行飞行控制算法的仿真和验证。根据具体需求和熟悉程度,选择适合的仿真平台和工具进行飞行控制的仿真设计和开发。
公众号 | FunIO
微信搜一搜 “funio”,发现更多精彩内容。
个人博客 | blog.boringhex.top