一、阴影
- 判断一个点是否被遮住,可以从该点像光源方向发射射线(
P + tL),若射线被与物体发生相交,则说明它在阴影中。而这个物体由于要在 P 和 光源之间,在方向光场景下, t 的取值范围是0 < t < +∞(因为光源无限远),而在点光下, t 的取值范围是0 < t < 1。
二、光栅化三角形
光追的简单性的代价是性能。而光栅化渲染模型是追求性能,而不是数学纯度。它的思维方式和光追相反。
-
光追:思考画布上的每个像素,场景中的哪个物体在这里是可见的?
-
光栅化:思考场景中的物体,在画布上的哪个像素这个物体是可见的?
-
绘制任意斜率的直线
当线趋于水平时(abs(dx) > abs(dy))使用y = f(x),确保能画出水平线
当线趋于垂直时(abs(dy) > abs(dx))使用x = f(y),确保能画出垂直线 -
线性插值函数
是基于绘制任意斜率中提取的公共部分,为Interpolate(),它计算两点之间线段上的点的 x 或 y 值,放置到一个数组中。当线趋于水平时,使用Interpolate(x0,y0, x1,y1)返回这些值是 y(因变量),当线趋于垂直时,使用Interpolate(y0,x0, y1,x1)返回的这些值是 x
这并不是最好的算法,目前比较好的直线算法是布兰森汉姆算法 -
三角形的绘制方式
给定三角形, 找出长边和短边,通过长边和两条短边的 x 坐标并集,找出左边的边和右边的边,自底向上从左边的点绘制到右边的点 -
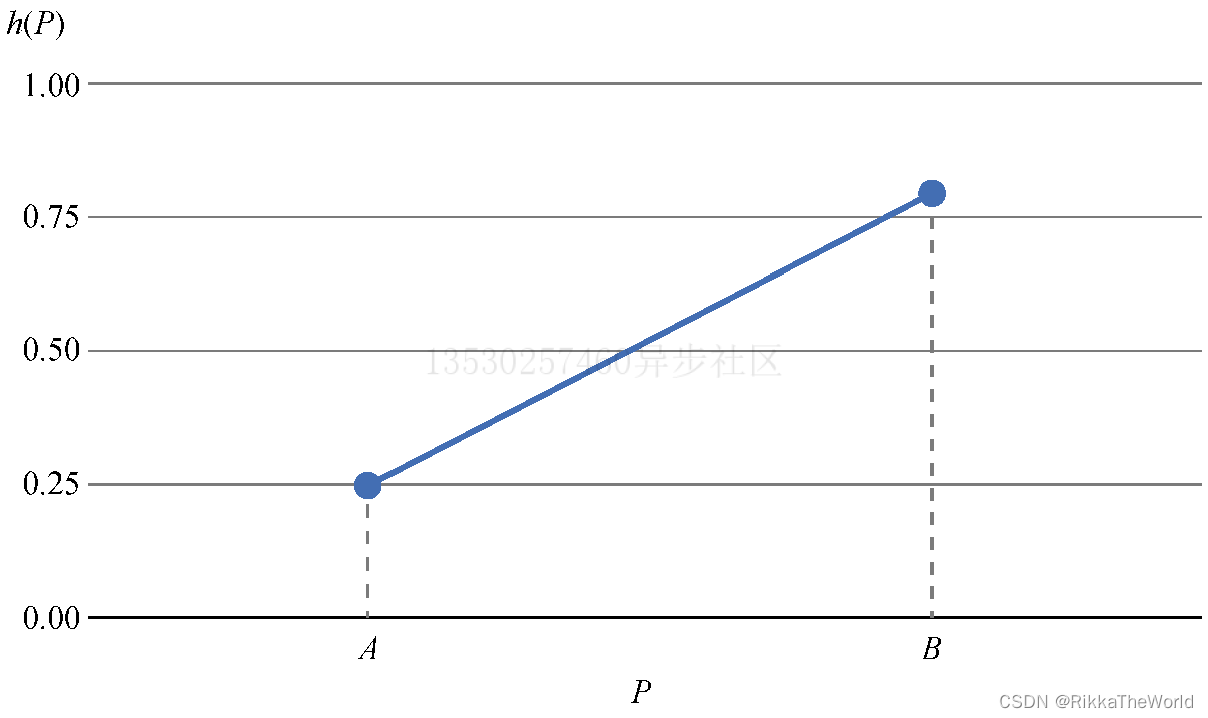
三角形的边缘着色
三角形颜色基色为 C,已知三个顶点的颜色强度为 h(取值范围为 [0,1],0表示黑色,1表示原色),那么每个点的颜色为Ch = (Rc h, Gc h, Bc h)
其次,边缘两点之间的点的颜色,可以用h = f(P)来计算,但是我们不知道它们的关系,所以可以先悬着一条兼容的函数,如下面的线性函数。
和三角形绘制的方式一样,我们通过线性插值函数,来计算每条边的上 h 的取值范围:
h01 = Interpolate(y0,h0, y1,h1)h12 = Interpolate(y1,h1, y2,h2)h02 = Interpolate(y0,h0, y2,h2)
然后跟随 x 取值找出每个水平线上的最左值和最右值
-
三角形内部着色
在获取到条水平线上的 hl 和 hr 之后,我们可以通过 xl 和 xr,来使用线性插值器计算这个线段上每个点的 h 值,这样就可以获取到每个像素的颜色了
三、 透视投影
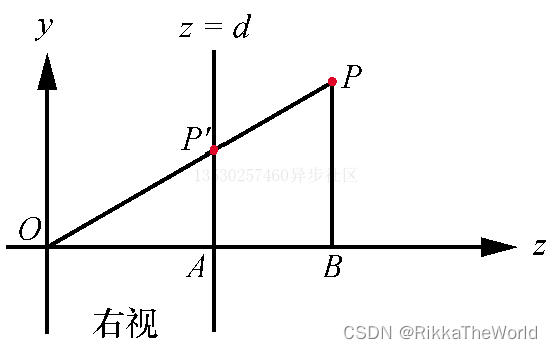
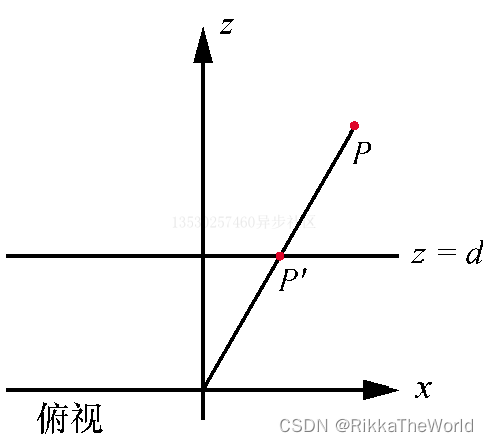
- 查找视口上的 P’ 点
通过右视,可以用相似三角形的方法,确定P'y = Py·d / Pz
通过俯视,确定P'z = Px·d / Pz
- 透视投影方程
将上述整合在一起,给定场景中的一个点 P 以及相机位置和视口的设置,我们可以计算 P 在视口上的投影,我们称之为 P’,那么 P’ 的坐标就是(Px·d/Pz, Py·d/Pz, d),在前面章节中学习了 画布 - 视口转化方程,这里需要反过来,编程 视口 - 画布转化方程,因此视口上 P’ 对应的 画布坐标为:
// Cw、Ch 为画布长宽, Vw Vh 为视口长宽
Cx = P'x · Cw / Vw
Cy = P'y · Ch / Vh
- 表示一个立方体
一个立方体可以看出是 8 个顶点,组成的 12 个三角形,因此可以使用绘制三角形的方式来绘制一个立方体。从而实现二维到三维的转化 - 模型变换
可以使用三个元素来定义模型变化,分别是:缩放、旋转、平移,无论是先平移后旋转,还是旋转后平移,都可以达成一样的效果,而在计算中,我们采用:先缩放,后旋转,最后平移 来计算模型最后的形态。
在固定场景中旋转和平移相机,与固定相机而旋转和平移场景是没有区别的。但是如如果固定相机,并指向 Z+,我们的透视投影方程就不用做出任何修改。这种坐标系也被称为相机空间。
假设相机也附加了变化,包括平移、旋转,为了从相机的视野去渲染场景,我们需要对场景中的每个顶点应用相反的变化,计算如下:
Vtranslated = Vscene - camera.translation // 世界平移程度(每个坐标的移动距离) = 每个场景的坐标 - 相机的平移距离
Vcam_space = inverse(camera.roation) · Vtranslated // 相机的位置 = 旋转后平移位置, 这里的旋转角度是相机本身的旋转角度的相反数
Vprojected = perspective_projection(Vcam_space) // 此时可以使用投影透视方程,算出场景中每个物体在平面上的坐标
- 变换矩阵
现在考虑在移动相机时,模型空间中的顶点 Vmodel 所发生的事情,直到它被投影到画布点 (cx, cy)。我们首先应用模型从模型空间到世界空间:
Vmodel_scaled = instance.scale · Vmodel // 模型缩放后的模型 = 实例的缩放因子 * 模型原始大小
Vmodel_roated = instance.roation · Vmodel_scaled // 模型旋转后的模型 = 实例的旋转因子 * 模型缩放后的模型
Vworld = Vmodel_rotated + instance.translation // 世界空间的每个点 = 模型旋转后的模型 + 实例的平移距离
然后应用相机变化,从世界空间变换到相机空间:
Vtranslated = Vworld - camera.translation // 世界平移坐标 = 世界原位置 - 相机移动位置
Vcamera = inverse(camera.roation) · Vtranslated // 相机位置 = 相机反方向旋转然后平移
接下来,应用透视方程获得视口坐标:
vx = Vcamera.x · d / Vcamera.z
vy = Vcamera.y · d / Vcamera.z
最后将视口坐标映射到画布坐标:
cx = vx · cw / vw
cy = vy · ch / vh
下面来简化这个方程,函数的输入是场景中的任意顶点,返回的是变化之后的顶点位置。设 Ct、Cr 为相机平移函数和旋转函数,IR、IS、IT 为模型实例的旋转函数、缩放函数、平移函数,P 为透视投影函数,M为视口-画布转换函数。V 表示原始顶点位置,V’ 表示画布上的坐标,我们可以使用下面这样表示以上所有方程:
V' = M(P(CR%^-1(CT^-1(IT(IR(IS(V))))))) // 新顶点坐标 = 模型上的原始坐标被缩放、旋转、平移后,再经过被相机自身平移、缩放,被投影到视口上,再转化到画布上
F = M · P ·CR^-1 · CT^-1 · IT ·IR · IS // 定义函数
V' = F(V)
- 齐次坐标
由于A = (x, y, z)可以表示为一个点(笛卡尔坐标系),也可以表示为一个向量,因此为了更好的区分它们,我们引入 w 值,w = 0 时表示它为向量,w = 1时表示它为点, 我们称A=(x,y, z, w)为齐次坐标 。 处理齐次坐标与处理向量是一致的,例如:
(8, 4, 2, 1) - (3, 2, 1, 1) = (5, 2, 1, 0)
当 w 既不为0 也不为1时,它依然表示点,而 w 则是坐标个 w 值之间的比率,例如 (1,2,3,1) 和 (2,4,6,2) 表示的是同一个点,我们可以使用下面公式,将齐次坐标转化为笛卡尔坐标
(x, y , z , w) = (x/w, y/w, z/w, 1) = (x/w, y/w, z/w)



![[数据分析与可视化] 基于matplotlib和plottable库绘制精美表格](https://img-blog.csdnimg.cn/img_convert/08af8feeb34df6aa6b01cc4efe71773b.png)