✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器
信号处理 图像处理 路径规划 元胞自动机 无人机 电力系统
⛄ 内容介绍
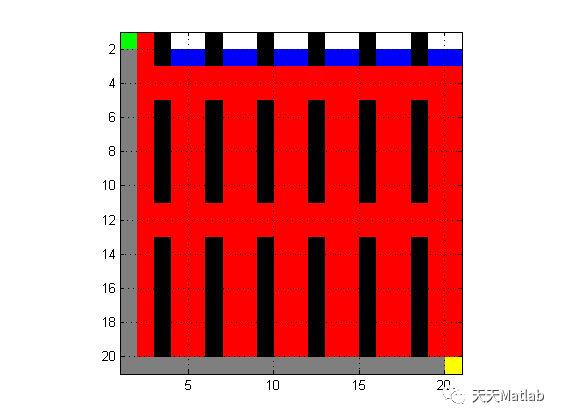
移动机器人路径规划一直是一个比较热门的话题,A星算法以及其扩展性算法被广范地应用于求解移动机器人的最优路径.该文在研究机器人路径规划算法中,详细阐述了传统A星算法的基本原理,并通过栅格法分割了机器人路径规划区域,利用MATLAB仿真平台生成了机器人二维路径仿真地图对其进行仿真实验,并对结果进行分析和研究,为今后进一步的研究提供经验.
⛄ 部分代码
%
% TestScript for Assignment 1
%
%% Define a small map
% map = false(10);
% Add an obstacle
% map (1:5, 6) = true;
map= [0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
];
map=logical(map);
start_coords = [4, 1];
dest_coords = [20, 20];
%%
close all;
% [route, numExpanded] = DijkstraGrid (map, start_coords, dest_coords);
% Uncomment following line to run Astar
[route, numExpanded] = AStarGrid (map, start_coords, dest_coords);
%HINT: With default start and destination coordinates defined above, numExpanded for Dijkstras should be 76, numExpanded for Astar should be 23.
⛄ 运行结果
⛄ 参考文献
⛄ Matlab代码关注
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
基于Dijkstra和A算法的机器人路径规划附Matlab代码
news2026/2/12 5:01:06
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/73857.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
JAVA SCRIPT设计模式--行为型--设计模式之Observer观察者模式(19)
JAVA SCRIPT设计模式是本人根据GOF的设计模式写的博客记录。使用JAVA SCRIPT语言来实现主体功能,所以不可能像C,JAVA等面向对象语言一样严谨,大部分程序都附上了JAVA SCRIPT代码,代码只是实现了设计模式的主体功能,不代…
Python图像识别实战(一):实现按比例随机抽取图像移动到另一文件夹
前面我介绍了可视化的一些方法以及机器学习在预测方面的应用,分为分类问题(预测值是离散型)和回归问题(预测值是连续型)(具体见之前的文章)。
从本期开始,我将做一个关于图像识别的…
如何批量注册推特账号
Twitter推特账号怎么注册?相信国内好多朋友都被推特注册卡住,不知怎么注册twitter账号,由于国内限制的问题,推特账号注册比以前更麻烦了,本文将详细讲解Twitter怎么注册,Twitter (推特)是一个广受欢迎的社交…
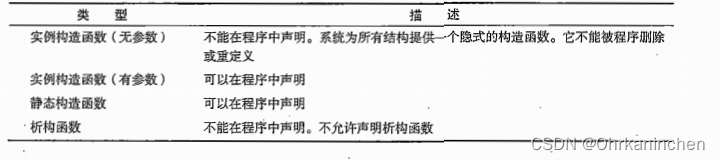
【C#基础学习】第十五章、结构
目录 结构
1.结构的构造函数
1.1 实例构造函数
1.2 静态构造函数
1.3 总结
2.结构体作为返回值和参数 结构 结构的定义:结构是一种可以由程序员自定义的密封的值类型。 结构与类的区别:结构与类类似,它们都有自己的数据成员和函数成员。…
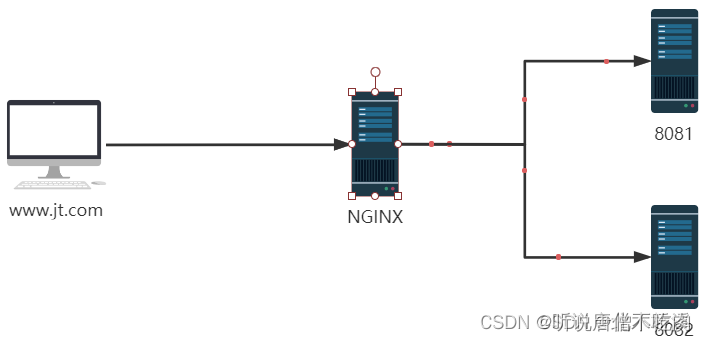
Nginx篇之实现反向代理和端口转发
一、前言 在正式生产环境中,web服务器、反向代理服务器的选择大都会选择nginx,确实,在常见的高并发场景下,nginx能够支持以万为单位的并发请求量,并且服务性能稳定,应用极为广泛。
二、反向代理含义 反向代…
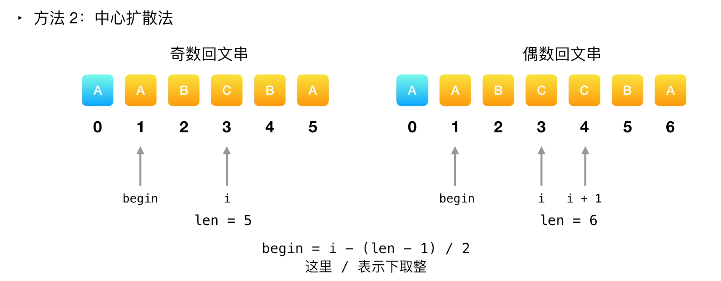
【LeetCode_字符串_中心扩散 】5. 最长回文子串
目录考察点第一次:2022年12月8日10:29:05解题思路代码展示:中心扩散题目描述5. 最长回文子串
给你一个字符串 s,找到 s 中最长的回文子串。
示例 1:
输入:s "babad"
输出:"bab"
解…
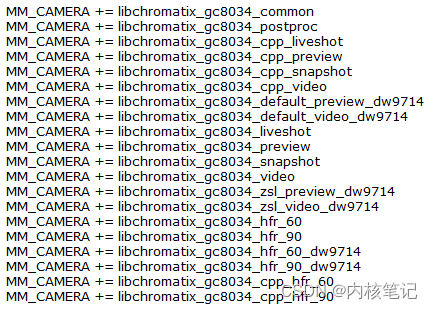
高通平台开发系列讲解(Camera篇)新增GC8034摄像头步骤
文章目录 一、新增配置文件二、配置摄像头三、设置效果文件四、修改设备树五、修改用户空间驱动程序沉淀、分享、成长,让自己和他人都能有所收获!😄 📢本篇章主要介绍高通平台新增摄像头步骤。 一、新增配置文件 在vendor/qcom/proprietary/common/config/device-vendor.…

解决Elasticsearch Connection reset by peer异常
一、问题现象
随着ES的密集使用,线上环境,不同应用最近几天陆续有报java.io.IOException: Connection reset by peer异常,感觉不太正常。直接影响就是用户查询或者变更ES数据失败。
java.io.IOException: Connection reset by peerat org.e…
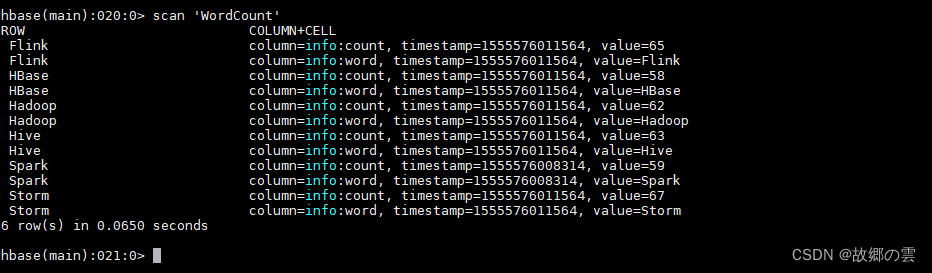
大数据:Storm集成HDFS和HBase
一、Storm集成HDFS
1.1 项目结构 1.2 项目主要依赖
项目主要依赖如下,有两个地方需要注意:
这里由于我服务器上安装的是 CDH 版本的 Hadoop,在导入依赖时引入的也是 CDH 版本的依赖,需要使用 <repository> 标签指定 CDH …
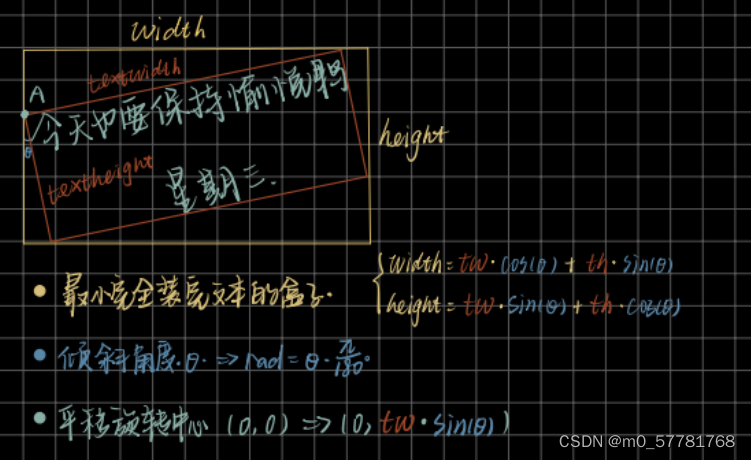
自适应且不可删除的水印蒙层
目录
canvas自适应文字长度,旋转角度生成水印背景图
生成蒙层
禁止蒙层的删除和修改 canvas自适应文字长度,旋转角度生成水印背景图 设置canvas字体大小后,通过ctx.measureText(text).width获取两行文字的宽度text1,text2&…

python-(6-5-1)爬虫---xpath解析实战
文章目录一 环境准备二 需求三 分析1 拿到页面源代码2 提取和解析数据四 步骤流程1 拿到页面源代码2 提取和解析数据五 完整代码xpath是在XML文档中搜索内容的一门语言 html是xml的一个子集
一 环境准备
安装lxml模块 二 需求
爬取某网站的数据 三 分析
1 拿到页面源代码
…

计算机领域热知识【2】消息队列与celery
Celery是实现消息队列的一个工具,本篇博客将介绍消息队列的基础知识,以及celery实现消息队列的总体方法。想要实现用Celery实现消息队列实例的朋友,可以从本篇博客中找到我写的另一篇介绍使用Celery和RabbitMQ实现消息队列的博客。 目录消息队…
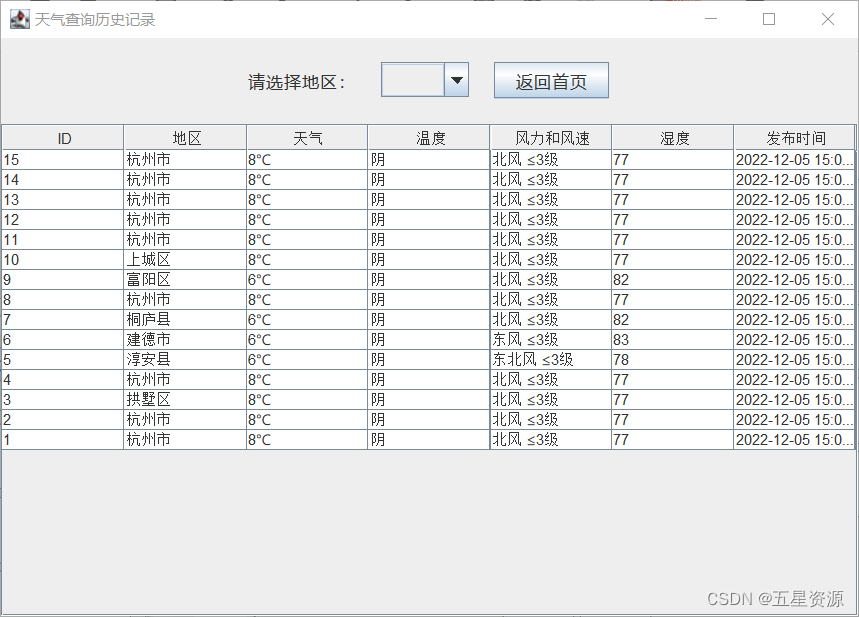
Java+Swing+mysql天气信息管理系统
JavaSwingmysql天气信息管理系统一、系统介绍二、功能展示1.主要功能2.主页3.查询历史天气三、数据库四、其他系统一、系统介绍
该系统实现: 通过高德天气API查询天气数据 将查询的数据存入本地数据库 删除数据。
二、功能展示
1.主要功能 2.主页 3.查询历史天气 三、数据库…
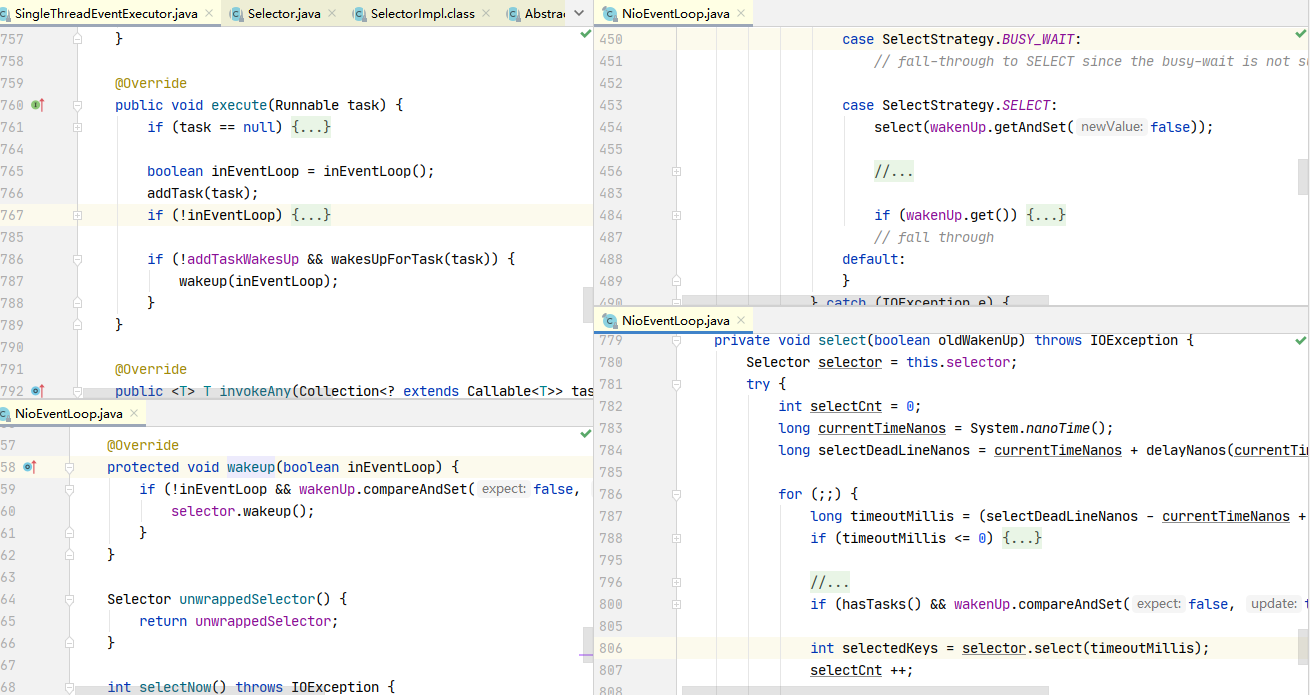
Netty04——优化与源码
目录1. 优化1.1 扩展序列化算法1.2 参数调优1.2.1.CONNECT_TIMEOUT_MILLIS1.2.2.SO_BACKLOG1.2.3.ulimit -n1.2.4.TCP_NODELAY1.2.5.SO_SNDBUF & SO_RCVBUF1.2.6.ALLOCATOR1.2.7.RCVBUF_ALLOCATOR1.3 RPC 框架1.3.1.准备工作1.3.2.服务器 handler1.3.3.客户端代码第一版1.3…

C#车库信息管理系统
车库信息管理系统实现
技术
C# sqlserver
系统功能
基本的登录注册车库管理员进行车辆信息的添加,即给车库登记车辆信息管理员对登记信息进行修改管理员对登记信息进行删除管理员对登记信息进行查询管理员对登记的车辆进行进库,出库处理实时统计车库…

CS61A学习笔记 lecture1 Computer science
CS61A学习笔记 lecture1 Computer science SICP: Structure and Interpretation of Computer Programs 计算机程序的构造和解释 一开始其实是想做南大的SICP学习笔记的,但是没有找到南大这门课的视频,还有就是他是CS61A的clone,网上也有CS61A…
Qt 多线程之QtConcurrent::map(处理序列容器)
QtConcurrent::map()、QtConcurrent::mapped() 和 QtConcurrent::mappedReduced() 函数对一个序列中(例如:QList、QVector)的项目并行地进行计算。
1、map函数
map函数的功能是在其他线程运行指定的函数,map函数有两个参数
第一…
耗时一个月整理的,最新出炉的Java面试题合集(2022亲身经历)
面试题清单
个人近来面试了不少的公司的,该挂的挂,该应付通过的应付通过,目前对面试题部分做一个系统的总结。最起码要保证被问过的问题第二次被问到的时候是可以回答并且理解的。算是一个被动输入学习的过程。
题目持续更新,答…