文章目录
- 62.不同路径(注意初始化)
- BFS深度搜索写法
- 动态规划思路
- DP数组的含义
- 递推公式
- DP数组初始化
- 遍历顺序
- 打印dp数组
- 动态规划写法
- 数组越界的问题
- for循环执行的问题
- 63.不同路径Ⅱ(初始化区别)
- 思路
- DP数组含义
- 递推公式
- DP数组初始化
- 最开始的写法:初始化有问题
- 修改完整版
- for循环遍历条件的问题
- 总结
62.不同路径(注意初始化)
- 本题初始化很重要,初始化的同时还要考虑越界的问题与可能性。
- 这道题需要和不同路径Ⅱ对比来看,就能看出初始化重要性,同时这两道题补充了一些关于for循环终止条件和执行的问题。
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。
问总共有多少条不同的路径?
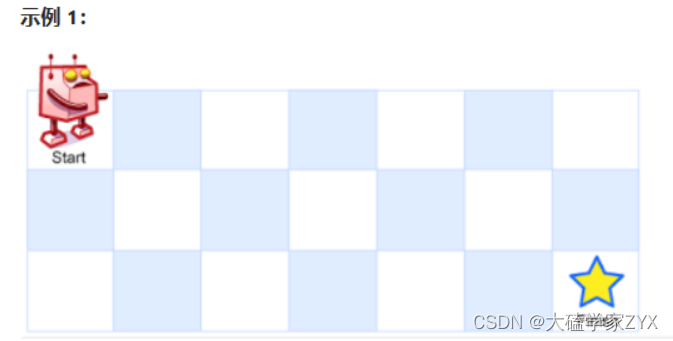
输入:m = 3, n = 7
输出:28
示例 2:
输入:m = 3, n = 2
输出:3
解释:
从左上角开始,总共有 3 条路径可以到达右下角。
1. 向右 -> 向下 -> 向下
2. 向下 -> 向下 -> 向右
3. 向下 -> 向右 -> 向下
示例 3:
输入:m = 7, n = 3
输出:28
示例 4:
输入:m = 3, n = 3
输出:6
提示:
1 <= m, n <= 100- 题目数据保证答案小于等于
2 * 10^9
BFS深度搜索写法
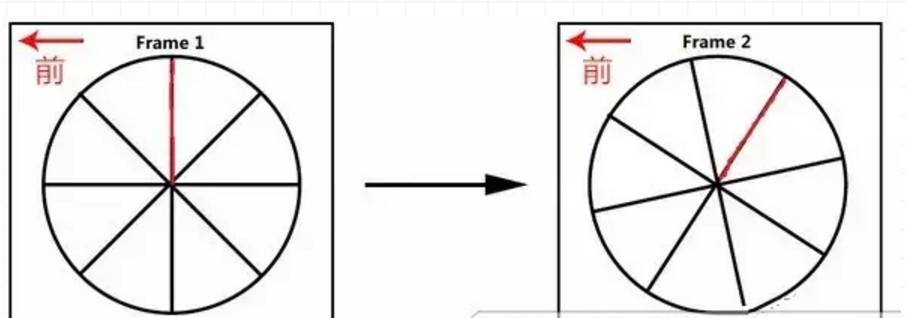
本题因为是给出了图寻找路径,最直观的想法就是用图论里的深搜,来枚举出来有多少种路径。
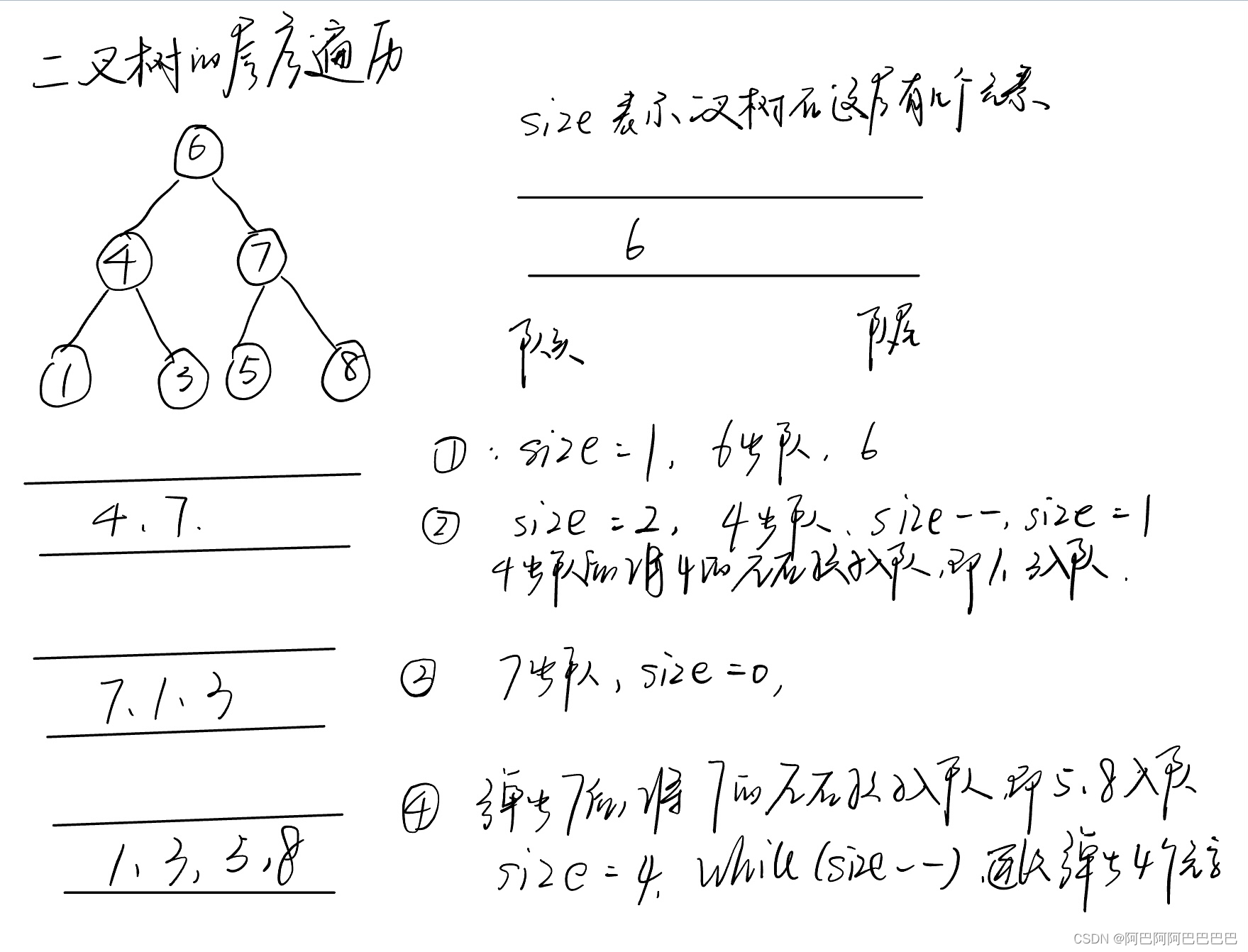
注意题目中说机器人每次只能向下或者向右移动一步,那么其实机器人走过的路径可以抽象为一棵二叉树,而叶子节点就是终点!
例如下图所示的例子:
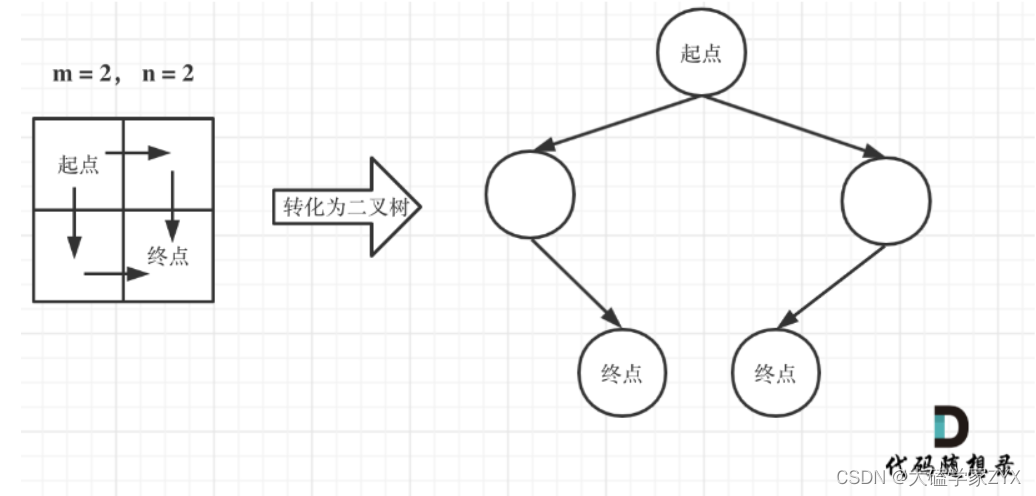
此时问题就可以转化为求二叉树叶子节点的个数,代码如下:
class Solution {
private:
int dfs(int i, int j, int m, int n) {
if (i > m || j > n) return 0; // 越界了
if (i == m && j == n) return 1; // 找到一种方法,相当于找到了叶子节点
return dfs(i + 1, j, m, n) + dfs(i, j + 1, m, n);
}
public:
int uniquePaths(int m, int n) {
return dfs(1, 1, m, n);
}
};
但是这么写,提交了代码会发现超时!
实际上是因为这个深搜的算法,其实就是要遍历整个二叉树。
这棵树的深度是m+n-1(深度按从1开始计算),那二叉树的节点个数就是 2^(m + n - 1) - 1。可以理解深搜的算法就是遍历了整个满二叉树(其实没有遍历整个满二叉树,只是近似而已)
所以上面深搜代码的时间复杂度为O(2^(m + n - 1) - 1),可以看出,这是指数级别的时间复杂度,是非常大的。
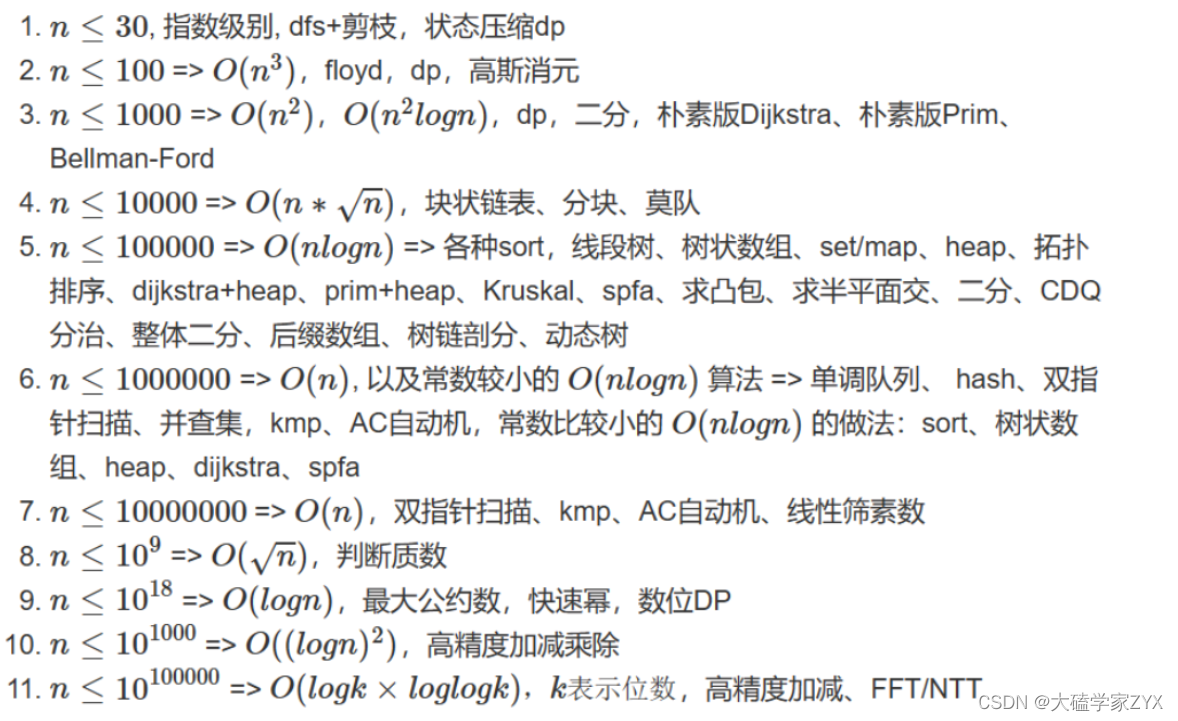
再复习一下数据范围和时间复杂度的关系,可以看出,指数级别的时间复杂度是需要n<=30才行的。
动态规划思路
DP需要记录每一个格子的状态,这样才能用状态转移方程进行格子状态的转换.
因为本题需要记录格子状态,因此我们需要定义一个二维的dp数组。
DP数组的含义
二维数组dp[i][j]的含义应该是,从[0,0]位置到[i,j]位置,有多少条不同的路径。因为待求的量就是路径数目。
递推公式
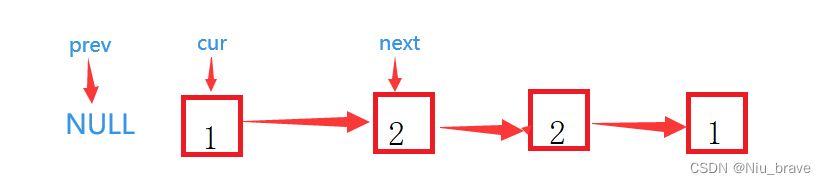
因为题目描述中说,机器人只能往下走或者往右走一步,因此,对于一个位置[i,j],他的上一个位置到达当前位置的路径最多只有两条,就是从上面来和从左边来。如下图所示。
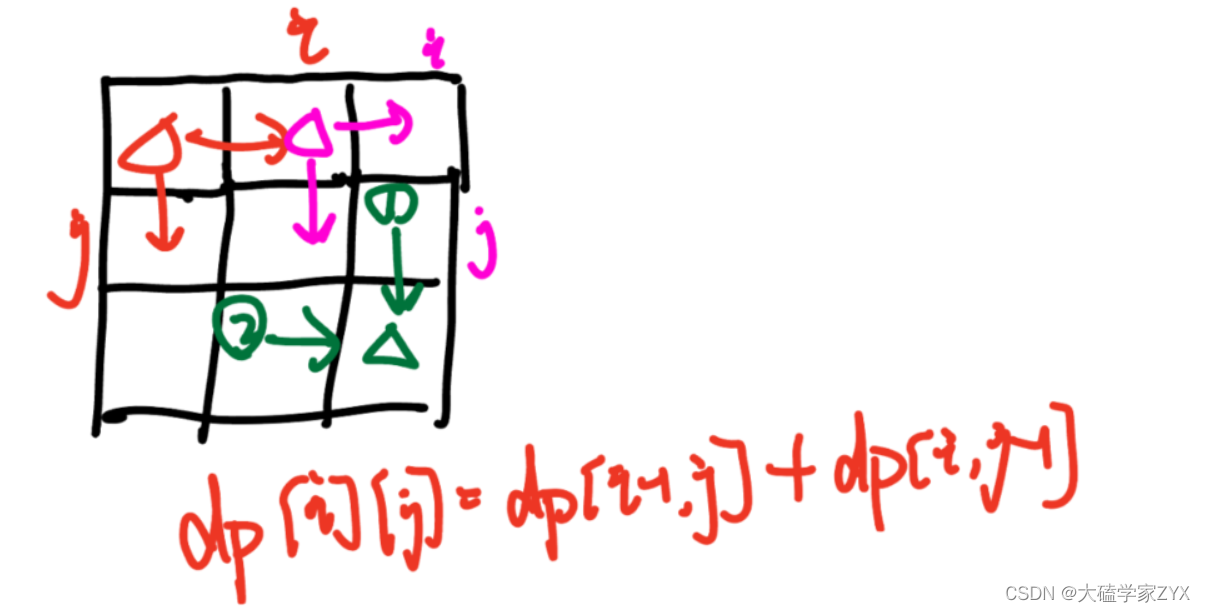
因此递推公式为:dp[i][j] = dp[i-1][j]+dp[i,j-1]
DP数组初始化
机器人从左上角的[0,0]开始走,由于数组下标越界影响,i和j都需要从1开始,也就是说,只要是i=0,j=0的情况,就会出现-1的下标越界,因此dp[i][0]和dp[0][j]这两行都需要做初始化!
初始化逻辑:
dp[i][0]就是一路横着走过去,路径数目就是1(因为只有这一个方向,也就是只有一条路径,注意这里是统计路径条数而不是走了几步),dp[0][j]同理
//直接从0开始初始化就行,初始化的时候不需要在意边界条件,[0][0]不存在越界问题
//j是0,横着只有一条路径方向
for(int i=0;i<m;i++){
dp[i][0]=1;
}
//i是0,竖着也只有一条路径方向
for(int j=0;j<n;j++){
dp[0][j]=1;
}
遍历顺序
递推公式dp[i][j] = dp[i - 1][j] + dp[i][j - 1],dp[i][j]都是从其上方和左方推导而来,那么从左到右一层一层遍历就可以了。
这样就可以保证推导dp[i][j]的时候,dp[i - 1][j] 和 dp[i][j - 1]一定是有数值的。
打印dp数组
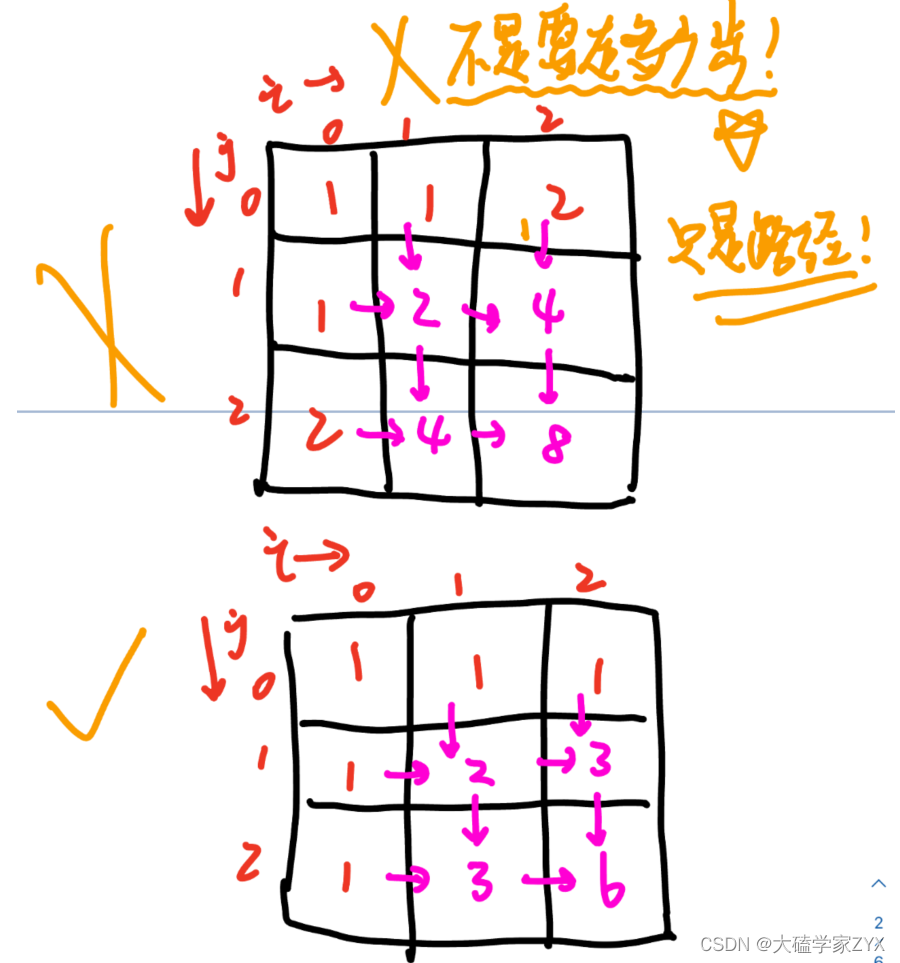
DP数组预期例子如图:
(这里一定要区分走多少步和路径的区别,路径的初始化是同个方向全部为1,但是走多少步的初始化是同个方向为i的递增)
正确的DP数组预期如下图第二个所示。
动态规划写法
- 二维数组初始化的方式:先放一维数组个数,再初始化内部的一维数组,如
vector<vector<int>>dp(m,vector<int>(n,0))(得到m*n,初值全部为0的二维矩阵)
class Solution {
public:
int uniquePaths(int m, int n) {
if(m==0&&n==0) return 0;
//二维数组初始化的方式:先放一维数组个数,再初始化内部的一维数组
vector<vector<int>>dp(m,vector<int>(n,0));
//dp数组初始化
for(int i=0;i<m;i++){
dp[i][0]=1;
}
for(int j=0;j<n;j++){
dp[0][j]=1;
}
//递推公式
for(int i=1;i<m;i++){
for(int j=1;j<n;j++){
dp[i][j]=dp[i-1][j]+dp[i][j-1];
}
}
return dp[m-1][n-1];
}
};
- 时间复杂度:O(m × n)
- 空间复杂度:O(m × n)
数组越界的问题
本题提示里面1 <= m, n <= 100,也就是说m n都是正整数。加上本题递推公式只涉及到了i-1,因此>=1的情况都不会越界。
并且本题是网格前提,m和n要么全部=0,要么都不为0,不存在m和n其中一个是0的情况。
即使存在 m 或 n 为 0, for 循环也不会执行,因为它们是从 0 到 m 或 n 的,所以在这个情况下代码是安全的。
for循环执行的问题
下列初始化的代码,在m=0,n=0的时候,for循环是不会执行的。因为在 C++ 中,for 循环的条件是在每次循环开始之前检查的。
假设 m 是 0,那么 for(int i=0; i<m; i++) 就会立即结束,因为条件 i<m 在一开始就不满足(0不小于0)。
同理,如果 n 是 0,那么 for(int j=0; j<n; j++) 也会立即结束,因为条件 j<n 在一开始就不满足。
//dp数组初始化
for(int i=0;i<m;i++){
dp[i][0]=1;
}
for(int j=0;j<n;j++){
dp[0][j]=1;
}
因此,即使m和n是0,也不会执行for循环的代码,同样也不会执行递推公式的for循环,因为一开始就不满足i<m的条件。
63.不同路径Ⅱ(初始化区别)
- 本题和上一题最大区别就在于初始化,本题的初始化需要考虑到,初始化i=0的时候,障碍物的存在会导致后面的全部被堵死,这种情况需要直接break,而不是只置零
- 而遍历到内部的时候,由于递推公式执行之前先判断是否是障碍物,因此障碍物直接置零,还有其他的路径可以相加,所以continue
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。

输入:obstacleGrid = [[0,0,0],[0,1,0],[0,0,0]]
输出:2
解释:3x3 网格的正中间有一个障碍物。
从左上角到右下角一共有 2 条不同的路径:
1. 向右 -> 向右 -> 向下 -> 向下
2. 向下 -> 向下 -> 向右 -> 向右

输入:obstacleGrid = [[0,1],[0,0]]
输出:1
提示:
- m ==
obstacleGrid.length - n ==
obstacleGrid[i].length - 1 <= m, n <= 100
obstacleGrid[i][j]为 0 或 1
思路
本题相对于上一题不同路径,实际上只是加上了障碍。本题加上了输入的数组,输入数组里数值为1的,就是有障碍的情况。
本题和上一道题目的基本思路都是相同的,但是我们需要把二维数组中的1变量的dp值全部置零,就可以消除掉障碍物的路径。
DP数组含义
本题DP数组仍然是表示当前累积的路径总数。
递推公式
dp[i][j]=dp[i-1][j]+dp[i][j-1],当有障碍物的时候,赋值dp[i][j]=0
DP数组初始化
在上一道题目中,最开始i=0的一整行,和j=0的一整列,都要初始化成1,因为递推公式里面的i-1和j-1存在下标越界的问题。
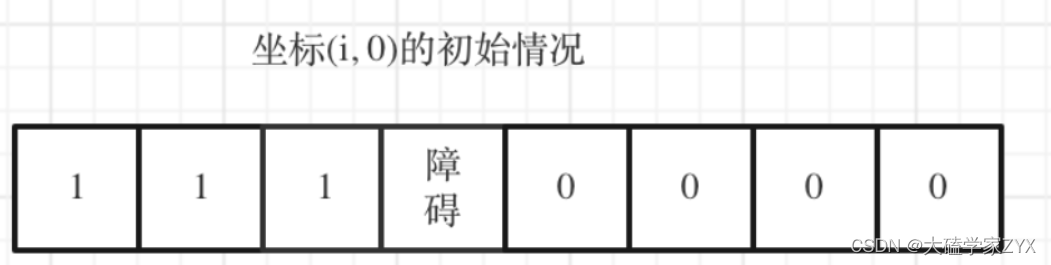
但是本题中,我们处理第一行和第一列的时候,一旦有障碍,for循环需要立即break。因为本题只能往右边和下边移动,因此只要有障碍,最上面的第一行后面的路径就全部作废了。
但是在二维矩阵内部,如果有障碍可以直接选择continue,因为下一个累加的时候,初始值0不会给累加做贡献。
最开始的写法:初始化有问题
- 注意二维数组获得m和n的方法,m直接=r.size(),n=r[0].size()
class Solution {
public:
int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {
int m=obstacleGrid.size();//得到二维数组一边
int n=obstacleGrid[0].size();//二维数组另一边
//cout<<m<<" "<<n<<endl;
if(m==0&&n==0) return 0;
//特殊情况:如果起点or终点是1 直接返回
if (obstacleGrid[m - 1][n - 1] == 1 || obstacleGrid[0][0] == 1) //如果在起点或终点出现了障碍,直接返回0
return 0;
vector<vector<int>>dp(m,vector<int>(n,0));//建立相同大小,初始值全是0的DP数组
//初始化
for(int i=1;i<m;i++){
if(obstacleGrid[i][0]==1){
dp[i][0]=0;
}
else{
dp[i][0]=1;
}
}
for(int j=1;j<n;j++){
if(obstacleGrid[0][j]==1){
dp[0][j]=0;
}
else{
dp[0][j]=1;
}
}
//打印DP结果调试
for(int i=0;i<m;i++){
for(int j=0;j<n;j++){
cout<<dp[i][j]<<" ";
}
cout<<endl;
}
//递推公式
for(int i=1;i<m;i++){
for(int j=1;j<n;j++){
if(obstacleGrid[i][j]!=1){
dp[i][j]=dp[i-1][j]+dp[i][j-1];
}
else{
dp[i][j]=0;
}
//cout<<dp[i][j]<<" ";
}
}
return dp[m-1][n-1];
}
};
这里的问题在于初始化。
修改完整版
class Solution {
public:
int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {
int m=obstacleGrid.size();
int n=obstacleGrid[0].size();
//如果起点或者终点障碍,直接返回0
if(obstacleGrid[0][0]==1||obstacleGrid[m-1][n-1]==1) return 0;
//创建dp数组 m*n矩阵
vector<vector<int>>dp(m,vector<int>(n,0));
//dp数组初始化
for(int i=0;i<m;i++){
if(obstacleGrid[i][0]==1) break; //如果是障碍物,那么这一行后面都无效,因为只能向右边和下边走
else
dp[i][0]=1;
}
for(int j=0;j<n;j++){
if(obstacleGrid[0][j]==1) break;
else
dp[0][j]=1;
}
//递推公式
for(int i=1;i<m;i++){
for(int j=1;j<n;j++){
if(obstacleGrid[i][j]==1) continue;
else{
dp[i][j]=dp[i-1][j]+dp[i][j-1];
}
}
}
return dp[m-1][n-1];
}
};
for循环遍历条件的问题
本题的初始化代码还可以写成:
vector<vector<int>> dp(m, vector<int>(n, 0));
for (int i = 0; i < m && obstacleGrid[i][0] == 0; i++) dp[i][0] = 1;
for (int j = 0; j < n && obstacleGrid[0][j] == 0; j++) dp[0][j] = 1;
与下面这段代码是等价的。
for (int i = 0; i < m ; i++) {
if(obstacleGrid[i][0] == 1) break;
dp[i][0] = 1;
}
for (int j = 0; j < n ; j++) {
if(obstacleGrid[0][j] == 1) break;
dp[0][j] = 1;
}
这是因为for循环的终止条件,一旦遇到obstacleGrid[i][0] == 1的情况就停止dp[i][0]的赋值1的操作。
在C++中,for循环的格式是for (initialization; condition; increment)。当条件condition为假时,for循环将立即停止,不再执行后面的步骤,这与break语句的作用是一样的。
第一种写法的条件部分是 i < m && obstacleGrid[i][0] == 0。当 i < m 是真的,但 obstacleGrid[i][0] == 0 是假的时,这个条件就会是假的,因此for循环会停止。
第二种写法使用了break语句来实现同样的效果。当 obstacleGrid[i][0] == 1 是真的时,break语句会被执行,这导致for循环立即停止,不再执行后面的步骤。
所以说,这是for循环的特性,即它的条件部分可以被看作是每次循环都要检查的一个断言,只有当这个断言是真的时,循环才会继续。当断言变为假时,循环立即终止。这和break语句效果相同。
总结
就算是做过62.不同路径,在做本题也会有感觉遇到障碍无从下手。
其实只要考虑到,遇到障碍dp[i][j]保持0就可以了。
也有一些重要的初始化细节,例如:初始化的部分,很容易忽略了障碍之后应该都是0的情况。