1.简述
实验目的
熟悉运动估计的块匹配(BMA)算法原理,编程实现全搜索算法(三步搜索或钻石搜索算法),了解运动估计在混合编码器中的作用。
实验内容
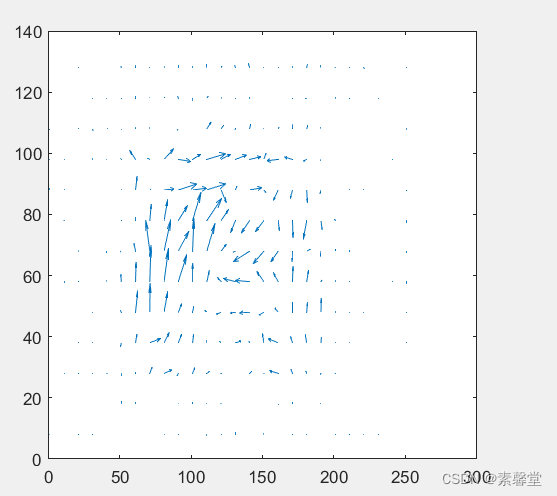
1)编写全搜索算法函数,将运动矢量叠加到当前帧上并显示输出;
2)显示输出预测帧、残差帧和重建图像,计算预测帧的PSNR。
附:可供参考的Matlab函数有hold、quiver
输出图像排列格式如下:
参考帧 当前帧 运动矢量图
预测帧 残差帧 重建帧
运动估计的基本思想是尽可能准确地获得序列图像帧间的运动位移,即运动矢量。因为运动估计越准确,预测补偿的图像质量越高,补偿的残差就越小,补偿编码所需位数越少,需要传输的比特率就越小。利用得到的运动矢量在帧间进行运动补偿。补偿残差经过变换、量化、编码后与运动矢量一起经过熵编码,然后以比特流形式发送出去。
在视频编码和处理系统中,运动估计和运动补偿技术对降低视频序列时间冗余度、提高编码效率起着非常关键的作用。运动估计的准确程度将直接决定视频编码器的编码效率。
运动估计算法概念
视频原始图像中存在着大量的信息冗余,如时间冗余、空间冗余、信息熵冗余、谱间冗余、几何结构冗余、视觉冗余和知识冗余等等。运动估计是视频压缩编码中的核心技术之一,采用运动估计和运动补偿技术可以消除视频信号的时间冗余以提高编码效率。如何提高运动估计的效率,使运动估计算法的搜索过程更健壮、更快速、更高效成为目前研究的热点。
运动估计的基本思想是尽可能准确地获得序列图像帧间的运动位移,即运动矢量。因为运动估计越准确,预测补偿的图像质量
2.代码
Lucas_Kanade('3.bmp','4.bmp',10)
Lucas_Kanade('1.bmp','2.bmp',10)
子程序:
function Lucas_Kanade(file1,file2,density);
%% Read Images %%
img1 = im2double (imread (file1));
%% Take alternating rows and columns %%
[odd1, even1] = split (img1);
img2 = im2double (imread (file2));
[odd2, even2] = split (img2);
%% Run Lucas Kanade %%
[Dx, Dy] = Estimate (odd1, odd2);
%% Plot %%
figure;
[maxI,maxJ]=size(Dx);
Dx=Dx(1:density:maxI,1:density:maxJ);
Dy=Dy(1:density:maxI,1:density:maxJ);
quiver(1:density:maxJ,(maxI):(-density):1,Dx,-Dy,1);
axis square;
%% Run Lucas Kanade on all levels and interpolate %%
function [Dx, Dy] = Estimate (img1, img2)
level = 4;
half_window_size=2;
[m, n] = size (img1);
G00 = img1; G10 = img2;
if (level>0)
G01 = reduce (G00); G11 = reduce (G10);
end
if (level>1)
G02 = reduce (G01); G12 = reduce (G11);
end
if (level>2)
G03 = reduce (G02); G13 = reduce (G12);
end
if (level>3)
G04 = reduce (G03); G14 = reduce (G13);
end
l = level;
for i=level:-1:0,
if (l == level)
switch (l)
case 4, Dx = zeros (size (G04)); Dy = zeros (size (G04));
case 3, Dx = zeros (size (G03)); Dy = zeros (size (G03));
case 2, Dx = zeros (size (G02)); Dy = zeros (size (G02));
case 1, Dx = zeros (size (G01)); Dy = zeros (size (G01));
case 0, Dx = zeros (size (G00)); Dy = zeros (size (G00));
end
else
Dx = expand (Dx); Dy = expand (Dy);
Dx = Dx .* 2; Dy = Dy .* 2;
end
switch (l)
case 4,
W = warp (G04, Dx, Dy);
[Vx, Vy] = EstimateMotion (W, G14, half_window_size);
case 3,
W = warp (G03, Dx, Dy);
[Vx, Vy] = EstimateMotion (W, G13, half_window_size);
case 2,
W = warp (G02, Dx, Dy);
[Vx, Vy] = EstimateMotion (W, G12, half_window_size);
case 1,
W = warp (G01, Dx, Dy);
[Vx, Vy] = EstimateMotion (W, G11, half_window_size);
case 0,
W = warp (G00, Dx, Dy);
[Vx, Vy] = EstimateMotion (W, G10, half_window_size);
end
[m, n] = size (W);
Dx(1:m, 1:n) = Dx(1:m,1:n) + Vx; Dy(1:m, 1:n) = Dy(1:m, 1:n) + Vy;
smooth (Dx); smooth (Dy);
l = l - 1;
end
%% Lucas Kanade on the image sequence at pyramid step %%
function [Vx, Vy] = EstimateMotion (W, G1, half_window_size)
[m, n] = size (W);
Vx = zeros (size (W)); Vy = zeros (size (W));
N = zeros (2*half_window_size+1, 5);
for i = 1:m,
l = 0;
for j = 1-half_window_size:1+half_window_size,
l = l + 1;
N (l,:) = getSlice (W, G1, i, j, half_window_size);
end
replace = 1;
for j = 1:n,
t = sum (N);
[v, d] = eig ([t(1) t(2);t(2) t(3)]);
namda1 = d(1,1); namda2 = d(2,2);
if (namda1 > namda2)
tmp = namda1; namda1 = namda2; namda2 = tmp;
tmp1 = v (:,1); v(:,1) = v(:,2); v(:,2) = tmp1;
end
if (namda2 < 0.001)
Vx (i, j) = 0; Vy (i, j) = 0;
elseif (namda2 > 100 * namda1)
n2 = v(1,2) * t(4) + v(2,2) * t(5);
Vx (i,j) = n2 * v(1,2) / namda2;
Vy (i,j) = n2 * v(2,2) / namda2;
else
n1 = v(1,1) * t(4) + v(2,1) * t(5);
n2 = v(1,2) * t(4) + v(2,2) * t(5);
Vx (i,j) = n1 * v(1,1) / namda1 + n2 * v(1,2) / namda2;
Vy (i,j) = n1 * v(2,1) / namda1 + n2 * v(2,2) / namda2;
end
N (replace, :) = getSlice (W, G1, i, j+half_window_size+1, half_window_size);
replace = replace + 1;
if (replace == 2 * half_window_size + 2)
replace = 1;
end
end
end
%% The Reduce Function for pyramid %%
function result = reduce (ori)
[m,n] = size (ori);
mid = zeros (m, n);
m1 = round (m/2); n1 = round (n/2);
result = zeros (m1, n1);
w = generateFilter (0.4);
for j=1:m,
tmp = conv([ori(j,n-1:n) ori(j,1:n) ori(j,1:2)], w);
mid(j,1:n1) = tmp(5:2:n+4);
end
for i=1:n1,
tmp = conv([mid(m-1:m,i); mid(1:m,i); mid(1:2,i)]', w);
result(1:m1,i) = tmp(5:2:m+4)';
end
%% The Expansion Function for pyramid %%
function result = expand (ori)
[m,n] = size (ori);
mid = zeros (m, n);
m1 = m * 2; n1 = n * 2;
result = zeros (m1, n1);
w = generateFilter (0.4);
for j=1:m,
t = zeros (1, n1);
t(1:2:n1-1) = ori (j,1:n);
tmp = conv ([ori(j,n) 0 t ori(j,1) 0], w);
mid(j,1:n1) = 2 .* tmp (5:n1+4);
end
for i=1:n1,
t = zeros (1, m1);
t(1:2:m1-1) = mid (1:m,i)';
tmp = conv([mid(m,i) 0 t mid(1,i) 0], w);
result(1:m1,i) = 2 .* tmp (5:m1+4)';
end
function filter = generateFilter (alpha)
filter = [0.25-alpha/2 0.25 alpha 0.25 0.25-alpha/2];
function [N] = getSlice (W, G1, i, j, half_window_size)
N = zeros (1, 5);
[m, n] = size (W);
for y=-half_window_size:half_window_size,
Y1 = y +i;
if (Y1 < 1)
Y1 = Y1 + m;
elseif (Y1 > m)
Y1 = Y1 - m;
end
X1 = j;
if (X1 < 1)
X1 = X1 + n;
elseif (X1 > n)
X1 = X1 - n;
end
DeriX = Derivative (G1, X1, Y1, 'x'); DeriY = Derivative (G1, X1, Y1, 'y');
N = N + [ DeriX * DeriX, ...
DeriX * DeriY, ...
DeriY * DeriY, ...
DeriX * (G1 (Y1, X1) - W (Y1, X1)), ...
DeriY * (G1 (Y1, X1) - W (Y1, X1))];
end
function result = smooth (img)
result = expand (reduce (img));
function [odd, even] = split (img);
[m, n] = size (img);
odd = img (1:2:m, :);
even = img (2:2:m, :);
%% Interpolation %%
function result = warp (img, Dx, Dy)
[m, n] = size (img);
[x,y] = meshgrid (1:n, 1:m);
x = x + Dx (1:m, 1:n); y = y + Dy (1:m,1:n);
for i=1:m,
for j=1:n,
if x(i,j)>n
x(i,j) = n;
end
if x(i,j)<1
x(i,j) = 1;
end
if y(i,j)>m
y(i,j) = m;
end
if y(i,j)<1
y(i,j) = 1;
end
end
end
result = interp2 (img, x, y, 'linear');
%% Calculates the Fx Fy %%
function result = Derivative (img, x, y, direction)
[m, n] = size (img);
switch (direction)
case 'x',
if (x == 1)
result = img (y, x+1) - img (y, x);
elseif (x == n)
result = img (y, x) - img (y, x-1);
else
result = 0.5 * (img (y, x+1) - img (y, x-1));
end
case 'y',
if (y == 1)
result = img (y+1, x) - img (y, x);
elseif (y == m)
result = img (y, x) - img (y-1, x);
else
result = 0.5 * (img (y+1, x) - img (y-1, x));
end
end
3.运行结果