1)实验平台:正点原子stm32f103战舰开发板V4
2)平台购买地址:https://detail.tmall.com/item.htm?id=609294757420
3)全套实验源码+手册+视频下载地址: http://www.openedv.com/thread-340252-1-1.html#
第五十三章 照相机实验
上一章,我们学习了图片解码,本章我们将学习BMP编码,结合前面的摄像头实验,实现一个简单的照相机功能。本章分为如下几个部分:
53.1 BMP编码简介
53.2 硬件设计
53.3 软件设计
53.4 下载验证
53.1 BMP编码简介
前面的章节中,我们学习了各种图片格式的解码。本章,我们介绍最简单的图片编码方法:BMP图片编码。通过前面的了解,我们知道BMP文件是由文件头、位图信息头、颜色信息和图形数据等四部分组成。我们先来了解下这几个部分。
1、BMP文件头(14字节):BMP文件头数据结构含有BMP文件的类型、文件大小和位图起始位置等信息。
这里的__PACKED_STRUCT是强制对齐,这里是把结构体中间的留白空间移除。默认定义的变量是按CUP字长(STM32为32位)对齐的,这样可以增加程序的访问速度,但这样定义一个结构体时如果结构体成员并不全部按CUP的字长去定义,如有uint8_t,uint16_t时,编译器默认按照的长度将占用2个uint32_t类型的长度,而对于嵌入式产品尤其是内存紧张的产品,这样定义的结构体变量就会浪费内存空间。嵌入式的编译器支持通过强制对齐,可以优化结构体变量的空间,大家同样可以在MDK的帮助文件中查找__packed关键字去看这部分的知识点。我们这里用了在MDK下同时兼容AC5和AC6编译器的写法。BMP的文件头定义如下:
/* BMP头文件 */
typedef __PACKED_STRUCT
{
uint16_t bfType ; /* 文件标志.只对'BM',用来识别BMP位图类型 */
uint32_t bfSize ; /* 文件大小,占四个字节 */
uint16_t bfReserved1 ; /* 保留 */
uint16_t bfReserved2 ; /* 保留 */
uint32_t bfOffBits ; /* 从文件开始到位图数据(bitmap data)开始之间的的偏移量 */
}BITMAPFILEHEADER ;
2、位图信息头(40字节):BMP位图信息头数据用于说明位图的尺寸等信息。
/* BMP信息头 */
typedef __PACKED_STRUCT
{
uint32_t biSize ; /* 说明BITMAPINFOHEADER结构所需要的字数。 */
long biWidth ; /* 说明图象的宽度,以象素为单位 */
long biHeight ; /* 说明图象的高度,以象素为单位 */
uint16_t biPlanes ; /* 为目标设备说明位面数,其值将总是被设为1 */
uint16_t biBitCount ; /* 说明比特数/象素,其值为1、4、8、16、24、或32 */
uint32_t biCompression; /* 说明图象数据压缩的类型。其值可以是下述值之一
* BI_RGB :没有压缩
* BI_RLE8 :每个象素8比特的RLE压缩编码,压缩格式由
2字节组成(重复象素计数和颜色索引)
* BI_RLE4 :每个象素4比特的RLE压缩编码,压缩格式由
2字节组成
* BI_BITFIELDS:每个象素的比特由指定的掩码决定
*/
uint32_t biSizeImage ; /*说明图象的大小,字节为单位。当用BI_RGB格式时,可设置为0*/
long biXPelsPerMeter ; /* 说明水平分辨率,用象素/米表示 */
long biYPelsPerMeter ; /* 说明垂直分辨率,用象素/米表示 */
uint32_t biClrUsed ; /* 说明位图实际使用的彩色表中的颜色索引数 */
/* 说明对图象显示有重要影响的颜色索引的数目,如果是0,表示都重要 */
uint32_t biClrImportant ;
}BITMAPINFOHEADER ;
3、颜色表:颜色表用于说明位图中的颜色,它有若干个表项,每一个表项是一个RGBQUAD类型的结构,定义一种颜色。
/* 彩色表 */
typedef __PACKED_STRUCT
{
uint8_t rgbBlue ; /* 指定蓝色强度 */
uint8_t rgbGreen ; /* 指定绿色强度 */
uint8_t rgbRed ; /* 指定红色强度 */
uint8_t rgbReserved ; /* 保留,设置为0 */
}RGBQUAD ;
颜色表中RGBQUAD结构数据的个数由biBitCount来确定:当biBitCount=1、4、8时,分别有2、16、256个表项;当biBitCount大于8时,没有颜色表项。
BMP文件头、位图信息头和颜色表组成位图信息(我们将BMP文件头也加进来,方便处理),BITMAPINFO结构定义如下:
/* 位图信息头 */
typedef __PACKED_STRUCT
{
BITMAPFILEHEADER bmfHeader;
BITMAPINFOHEADER bmiHeader;
uint32_t RGB_MASK[3]; /* 调色板用于存放RGB掩码 */
//RGBQUAD bmiColors[256];
}BITMAPINFO;
4、位图数据:位图数据记录了位图的每一个像素值,记录顺序是在扫描行内是从左到右,扫描行之间是从下到上。位图的一个像素值所占的字节数:
当biBitCount=1时,8个像素占1个字节;
当biBitCount=4时,2个像素占1个字节;
当biBitCount=8时,1个像素占1个字节;
当biBitCount=16时,1个像素占2个字节;
当biBitCount=24时,1个像素占3个字节;
当biBitCount=32时,1个像素占4个字节;
biBitCount=1 表示位图最多有两种颜色,缺省情况下是黑色和白色,你也可以自己定义这两种颜色。图像信息头装调色板中将有两个调色板项,称为索引0和索引1。图象数据阵列中的每一位表示一个像素。如果一个位是0,显示时就使用索引0的RGB值,如果位是1,则使用索引1的RGB值。
biBitCount=16 表示位图最多有65536种颜色。每个像素用16位(2个字节)表示。这种格式叫作高彩色,或叫增强型16位色,或64K色。它的情况比较复杂,当biCompression成员的值是BI_RGB时,它没有调色板。16位中,最低的5位表示蓝色分量,中间的5位表示绿色分量,高的5位表示红色分量,一共占用了15位,最高的一位保留,设为0。这种格式也被称作555 16位位图。如果biCompression成员的值是BI_BITFIELDS,那么情况就复杂了,首先是原来调色板的位置被三个DWORD变量占据,称为红、绿、蓝掩码。分别用于描述红、绿、蓝分量在16位中所占的位置。在Windows 95(或98)中,系统可接受两种格式的位域:555和565,在555格式下,红、绿、蓝的掩码分别是:0x7C00、0x03E0、0x001F,而在565格式下,它们则分别为:0xF800、0x07E0、0x001F。你在读取一个像素之后,可以分别用掩码“与”上像素值,从而提取出想要的颜色分量(当然还要再经过适当的左右移操作)。在NT系统中,则没有格式限制,只不过要求掩码之间不能有重叠。(注:这种格式的图像使用起来是比较麻烦的,不过因为它的显示效果接近于真彩,而图像数据又比真彩图像小的多,所以,它更多的被用于游戏软件)。
biBitCount=32 表示位图最多有4294967296(2的32次方)种颜色。这种位图的结构与16位位图结构非常类似,当biCompression成员的值是BI_RGB时,它也没有调色板,32位中有24位用于存放RGB值,顺序是:最高位—保留,红8位、绿8位、蓝8位。这种格式也被成为888 32位图。如果 biCompression成员的值是BI_BITFIELDS时,原来调色板的位置将被三个DWORD变量占据,成为红、绿、蓝掩码,分别用于描述红、绿、蓝分量在32位中所占的位置。在Windows 95(or 98)中,系统只接受888格式,也就是说三个掩码的值将只能是:0xFF0000、0xFF00、0xFF。而在NT系统中,你只要注意使掩码之间不产生重叠就行。(注:这种图像格式比较规整,因为它是DWORD对齐的,所以在内存中进行图像处理时可进行汇编级的代码优化(简单))。
通过以上了解,我们对BMP有了一个比较深入的了解,本章,我们采用16位BMP编码(因为我们的LCD就是16位色的,而且16位BMP编码比24位BMP编码更省空间),故我们需要设置biBitCount的值为16,这样得到新的位图信息(BITMAPINFO)结构体:
/* 位图信息头 */
typedef __packed struct
{
BITMAPFILEHEADER bmfHeader;
BITMAPINFOHEADER bmiHeader;
uint32_t RGB_MASK[3]; /* 调色板用于存放RGB掩码 */
}BITMAPINFO;
其实就是颜色表由3个RGB掩码代替。最后,我们来看看将LCD的显存保存为BMP格式的图片文件的步骤:
1) 创建BMP位图信息,并初始化各个相关信息
这里,我们要设置BMP图片的分辨率为LCD分辨率、BMP图片的大小(整个BMP文件大小)、BMP的像素位数(16位)和掩码等信息。
2) 创建新BMP文件,写入BMP位图信息
我们要保存BMP,当然要存放在某个地方(文件),所以需要先创建文件,同时先保存BMP位图信息,之后才开始BMP数据的写入。
3) 保存位图数据。
这里就比较简单了,只需要从LCD的GRAM里面读取各点的颜色值,依次写入第二步创建的BMP文件即可。注意:保存顺序(即读GRAM顺序)是从左到右,从下到上。
4) 关闭文件。
使用FATFS,在文件创建之后,必须调用f_close,文件才会真正体现在文件系统里面,否则是不会写入的!这个要特别注意,写完之后,一定要调用f_close。
BMP编码就介绍到这里。
53.2 硬件设计
- 例程功能
开机的时候先检测字库,然后检测SD卡根目录是否存在PHOTO文件夹,如果不存在则创建,如果创建失败,则报错(提示拍照功能不可用)。在找到SD卡的PHOTO文件夹后,开始初始化OV7670,在初始化成功之后,就一直在屏幕显示OV7670拍到的内容。当按下KEY0按键的时候,即进行拍照,此时DS1亮,拍照保存成功之后,蜂鸣器会发出“滴”的一声,提示拍照成功,同时DS1灭。DS0还是用于指示程序运行状态。 - 硬件资源
1 ) LED灯
DS0(RED) : LED0 - PB5
DS1(GREEN) : LED1 - PE5
2 ) 独立按键
KEY0 - PE4
KEY1 - PE3
KEY2 - PE2
KEY_UP - PA0 (程序中的宏名:WK_UP)
- 串口1 (PA9/PA10连接在板载USB转串口芯片CH340上面)
- 正点原子 2.8/3.5/4.3/7/10寸TFTLCD模块(仅限MCU屏,16位8080并口驱动)
- SD卡:
SDIO(SDIO_D0D4(PC8PC11),SDIO_SCK(PC12),SDIO_CMD(PD2))连接 - norflash(SPI FLASH芯片,本例为W25QXX,连接在SPI2上)
- 外部中断8(PA8,用于检测OV7725的帧信号)
- 定时器6(用于打印摄像头帧率)
- 正点原子 OV7725摄像头模块,连接关系为:
OV7725模块 ------------ STM32开发板
OV_D0~D7 ------------ PC0~7
OV_SCL ------------ PD3
OV_SDA ------------ PG13
OV_VSYNC ------------ PA8
FIFO_RRST ------------ PG14
FIFO_OE ------------ PG15
FIFO_WRST ------------ PD6
FIFO_WEN ------------ PB3
FIFO_RCLK ------------ PB4
53.3 程序设计
53.3.1 程序流程图
图53.3.1.1 照相机实验程序流程图
本实验进行摄像头的初始化后,检测SD卡是否存在,然后自动选择摄像头的模式,按下KEY0即可把摄像头捕捉到的图像拍下。
53.3.2 程序解析
本实验是在摄像头实验的基础上进行扩展的应用,因此我们复制《实验34 摄像头实验》的工程,在《Middlewares》中加入图片显示实验中的《PICTURE》代码,同时因为我们要用到较大的内存,需要把《MALLOC》的代码也加进来。
- PICTURE驱动代码
这里我们只讲解核心代码,详细的源码请大家参考光盘本实验对应源码,PICTURE的驱动主要包括两个文件:bmp.c和bmp.h。
bmp.h头文件在53.1.1小节基本讲过,具体请看源码。下面来看到bmp.c文件里面的bmp编码函数:bmp_encode,该函数代码如下:
/**
* @brief BMP编码函数
* @note 将当前LCD屏幕的指定区域截图,存为16位格式的BMP文件 RGB565格式.
* 保存为rgb565则需要掩码,需要利用原来的调色板位置增加掩码.这里我们已经增加了掩码.
* 保存为rgb555格式则需要颜色转换,耗时间比较久,所以保存为565是最快速的办法.
*
* @param filename : 包含存储路径的文件名(.bmp)
* @param x, y : 起始坐标
* @param width,height: 区域大小
* @param acolor : 附加的alphablend的颜色(这个仅对32位色bmp有效!!!)
* @param mode : 保存模式
* @arg 0, 仅仅创建新文件的方式编码;
* @arg 1, 如果之前存在文件,则覆盖之前的文件.如果没有,则创建新的文件;
* @retval 操作结果
* @arg 0 , 成功
* @arg 其他, 错误码
*/
uint8_t bmp_encode(uint8_t *filename, uint16_t x, uint16_t y, uint16_t width,
uint16_t height, uint8_t mode)
{
FIL *f_bmp;
uint32_t bw = 0;
uint16_t bmpheadsize; /* bmp头大小 */
BITMAPINFO hbmp; /* bmp头 */
uint8_t res = 0;
uint16_t tx, ty; /* 图像尺寸 */
uint16_t *databuf; /* 数据缓存区地址 */
uint16_t pixcnt; /* 像素计数器 */
uint16_t bi4width; /* 水平像素字节数 */
if (width == 0 || height == 0)return PIC_WINDOW_ERR; /* 区域错误 */
if ((x + width - 1) > lcddev.width)return PIC_WINDOW_ERR; /* 区域错误 */
if ((y + height - 1) > lcddev.height)return PIC_WINDOW_ERR;/* 区域错误 */
#if BMP_USE_MALLOC == 1 /* 使用malloc */
/* 开辟至少bi4width大小的字节的内存区域 ,对240宽的屏,480个字节就够了.
最大支持1024宽度的bmp编码 */
databuf = (uint16_t *)piclib_mem_malloc(2048);
if (databuf == NULL)return PIC_MEM_ERR; /* 内存申请失败. */
f_bmp = (FIL *)piclib_mem_malloc(sizeof(FIL)); /* 开辟FIL字节的内存区域 */
if (f_bmp == NULL) /* 内存申请失败 */
{
piclib_mem_free(databuf);
return PIC_MEM_ERR;
}
#else
databuf = (uint16_t *)bmpreadbuf;
f_bmp = &f_bfile;
#endif
bmpheadsize = sizeof(hbmp); /* 得到bmp文件头的大小 */
my_mem_set((uint8_t *)&hbmp, 0, sizeof(hbmp)); /* 置零空申请到的内存 */
hbmp.bmiHeader.biSize = sizeof(BITMAPINFOHEADER); /* 信息头大小 */
hbmp.bmiHeader.biWidth = width; /* bmp的宽度 */
hbmp.bmiHeader.biHeight = height; /* bmp的高度 */
hbmp.bmiHeader.biPlanes = 1; /* 恒为1 */
hbmp.bmiHeader.biBitCount = 16; /* bmp为16位色bmp */
hbmp.bmiHeader.biCompression = BI_BITFIELDS;/*每个象素的比特由指定的掩码决定*/
hbmp.bmiHeader.biSizeImage = hbmp.bmiHeader.biHeight *
hbmp.bmiHeader.biWidth * hbmp.bmiHeader.biBitCount/8;/* bmp数据区大小 */
hbmp.bmfHeader.bfType = ((uint16_t)'M' << 8) + 'B'; /* BM格式标志 */
/* 整个bmp的大小 */
hbmp.bmfHeader.bfSize = bmpheadsize + hbmp.bmiHeader.biSizeImage;
hbmp.bmfHeader.bfOffBits = bmpheadsize; /* 到数据区的偏移 */
hbmp.RGB_MASK[0] = 0X00F800; /* 红色掩码 */
hbmp.RGB_MASK[1] = 0X0007E0; /* 绿色掩码 */
hbmp.RGB_MASK[2] = 0X00001F; /* 蓝色掩码 */
if (mode == 1)
{/* 尝试打开之前的文件 */
res = f_open(f_bmp, (const TCHAR *)filename, FA_READ | FA_WRITE);
}
if (mode == 0 || res == 0x04)
{/* 模式0,或者尝试打开失败,则创建新文件 */
res = f_open(f_bmp, (const TCHAR *)filename, FA_WRITE | FA_CREATE_NEW);
}
if ((hbmp.bmiHeader.biWidth * 2) % 4) /* 水平像素(字节)不为4的倍数 */
{/* 实际要写入的宽度像素,必须为4的倍数 */
bi4width = ((hbmp.bmiHeader.biWidth * 2) / 4 + 1) * 4;
}
else
{
bi4width = hbmp.bmiHeader.biWidth * 2; /* 刚好为4的倍数 */
}
if (res == FR_OK) /* 创建成功 */
{
res = f_write(f_bmp, (uint8_t *)&hbmp, bmpheadsize, &bw);/* 写入BMP首部*/
for (ty = y + height - 1; hbmp.bmiHeader.biHeight; ty--)
{
pixcnt = 0;
for (tx = x; pixcnt != (bi4width / 2);)
{
if (pixcnt < hbmp.bmiHeader.biWidth)
{
databuf[pixcnt] = pic_phy.read_point(tx, ty);/* 读取坐标点的值*/
}
else
{
databuf[pixcnt] = 0Xffff; /* 补充白色的像素 */
}
pixcnt++;
tx++;
}
hbmp.bmiHeader.biHeight--;
res = f_write(f_bmp, (uint8_t *)databuf, bi4width, &bw);/* 写入数据*/
}
f_close(f_bmp);
}
#if BMP_USE_MALLOC == 1 /* 使用malloc */
piclib_mem_free(databuf);
piclib_mem_free(f_bmp);
#endif
return res;
}
该函数实现了对LCD屏幕的任意指定区域进行截屏保存,用到的方法就是53.1.1节我们所介绍的方法,该函数实现了将LCD任意指定区域的内容,保存个为16位BMP格式,存放在指定位置(由filename决定)。注意,代码中的BMP_USE_MALLOC是在bmp.h定义的一个宏,用于设置是否使用malloc,本章我们选择使用malloc。
2. main.c代码
main.c函数我们在之前摄像头实验的基本上进行改动,首先我们要为图片分配一个与图片文件夹下名字不重复的文件名,我们复用FATFS的接口,设计如下:
/**
* @brief 文件名自增(避免覆盖)
* @note 组合成形如 "0:PHOTO/PIC13141.bmp" 的文件名
* @param pname : 有效的文件名
* @retval 无
*/
void camera_new_pathname(char *pname)
{
uint8_t res;
uint16_t index = 0;
FIL *ftemp;
ftemp = (FIL *)mymalloc(SRAMIN, sizeof(FIL)); /* 开辟FIL字节的内存区域 */
if (ftemp == NULL) return; /* 内存申请失败 */
while (index < 0XFFFF)
{
sprintf((char *)pname, "0:PHOTO/PIC%05d.bmp", index);
res = f_open(ftemp, (const TCHAR *)pname, FA_READ); /* 尝试打开这个文件 */
if (res == FR_NO_FILE)break; /* 该文件名不存在, 正是我们需要的 */
index++;
}
myfree(SRAMIN, ftemp);
}
通过以上程序,可以生成一个与当前文件夹下图片不重名的文件名字符串,并传给针对应的缓冲区。为了模拟照相机的效果,我们需要把LCD上显示的画像读取出来并用前面的bmp_encode()函数编码成*.bmp格式的图片进行存储,以模拟实时的拍照效果。省去部分与之前实验相同的代码,我们修改整理后的main函数代码如下:
extern uint8_t g_ov7725_vsta; /* 在exit.c里 面定义 */
extern uint8_t g_ov7725_frame; /* 在timer.c里面定义 */
int main(void)
{
uint8_t res;
char *pname; /* 带路径的文件名 */
uint8_t key; /* 键值 */
uint8_t i;
uint8_t sd_ok = 1; /* 0, sd卡不正常; 1, SD卡正常 */
uint8_t vga_mode = 0; /* 0, QVGA模式(320 * 240); 1, VGA模式(640 * 480) */
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(72); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
usmart_dev.init(72); /* 初始化USMART */
led_init(); /* 初始化LED */
lcd_init(); /* 初始化LCD */
key_init(); /* 初始化按键 */
sram_init(); /* SRAM初始化 */
beep_init(); /* 蜂鸣器初始化 */
norflash_init(); /* 初始化NORFLASH */
my_mem_init(SRAMIN); /* 初始化内部SRAM内存池 */
my_mem_init(SRAMEX); /* 初始化外部SRAM内存池 */
exfuns_init(); /* 为fatfs相关变量申请内存 */
f_mount(fs[0], "0:", 1); /* 挂载SD卡 */
f_mount(fs[1], "1:", 1); /* 挂载FLASH */
piclib_init(); /* 初始化画图 */
while (fonts_init()) /* 检查字库 */
{
lcd_show_string(30, 50, 200, 16, 16, "Font Error!", RED);
delay_ms(200);
lcd_fill(30, 50, 240, 66, WHITE); /* 清除显示 */
delay_ms(200);
}
text_show_string(30, 50, 200, 16, "正点原子STM32开发板", 16, 0, RED);
text_show_string(30, 70, 200, 16, "照相机 实验", 16, 0, RED);
text_show_string(30, 90, 200, 16, "KEY0:拍照(bmp格式)", 16, 0, RED);
res = f_mkdir("0:/PHOTO"); /* 创建PHOTO文件夹 */
if (res != FR_EXIST && res != FR_OK) /* 发生了错误 */
{
res = f_mkdir("0:/PHOTO"); /* 创建PHOTO文件夹 */
text_show_string(30, 110, 240, 16, "SD卡错误!", 16, 0, RED);
delay_ms(200);
text_show_string(30, 110, 240, 16, "拍照功能将不可用!", 16, 0, RED);
delay_ms(200);
sd_ok = 0;
}
while (ov7725_init() != 0) /* 初始化OV7725 失败? */
{
lcd_show_string(30, 130, 200, 16, 16, "OV7725 Error!!", RED);
delay_ms(200);
lcd_fill(30, 150, 239, 246, WHITE);
delay_ms(200);
}
lcd_show_string(30, 130, 200, 16, 16, "OV7725 Init OK ", RED);
delay_ms(1500);
/* 输出窗口大小设置 QVGA / VGA 模式 */
g_ov7725_wwidth = 320; /* 默认窗口宽度为320 */
g_ov7725_wheight = 240; /* 默认窗口高度为240 */
ov7725_window_set(g_ov7725_wwidth, g_ov7725_wheight, vga_mode);
ov7725_light_mode(0); /* 自动 灯光模式 */
ov7725_color_saturation(4); /* 默认 色彩饱和度 */
ov7725_brightness(4); /* 默认 亮度 */
ov7725_contrast(4); /* 默认 对比度 */
ov7725_special_effects(0); /* 默认 特效 */
OV7725_OE(0); /* 使能OV7725 FIFO数据输出 */
pname = mymalloc(SRAMIN, 30); /* 为带路径的文件名分配30个字节的内存 */
btim_timx_int_init(10000,7200 - 1); /* 10Khz计数频率,1秒钟中断 */
exti_ov7725_vsync_init(); /* 使能OV7725 VSYNC外部中断, 捕获帧中断 */
lcd_clear(BLACK);
while (1)
{
key = key_scan(0);
if (key == KEY0_PRES)
{
if (sd_ok)
{
LED1(0); /* 点亮DS1,提示正在拍照 */
camera_new_pathname(pname); /* 得到文件名 */
/* 编码成bmp图片 */
if (bmp_encode((uint8_t *)pname,
(lcddev.width - g_ov7725_wheight) / 2,
(lcddev.height - g_ov7725_wwidth) / 2,
g_ov7725_wheight, g_ov7725_wwidth, 0))
{
text_show_string(40, 110, 240, 12, "写入文件错误!", 12, 0, RED);
}
else
{
text_show_string(40, 110, 240, 12, "拍照成功!", 12, 0, BLUE);
text_show_string(40, 130, 240, 12, "保存为:", 12, 0, BLUE);
text_show_string(40 + 42, 130, 240, 12, pname, 12, 0, BLUE);
BEEP(1); /* 蜂鸣器短叫,提示拍照完成 */
delay_ms(100);
}
}
else /* 提示SD卡错误 */
{
text_show_string(40, 110, 240, 12, "SD卡错误!", 12, 0, RED);
text_show_string(40, 130, 240, 12, "拍照功能不可用!", 12, 0, RED);
}
BEEP(0); /* 关闭蜂鸣器 */
LED1(1); /* 关闭DS1 */
delay_ms(1800); /* 等待1.8秒钟 */
lcd_clear(BLACK);
}
else
{
delay_ms(5);
}
ov7725_camera_refresh(); /* 更新显示 */
i++;
if (i >= 15) /* DS0闪烁 */
{
i = 0;
LED0_TOGGLE(); /* LED0闪烁 */
}
}
}
到这里本实验的代码基本就编写完成了,最后。
53.4 下载验证
将程序下载到开发板后,可以看到LCD首先显示一些实验相关的信息,如图53.4.1所示:

图53.4.1显示实验相关信息
随后,进入监控界面。此时,我们可以按下KEY0即可进行拍照。拍照得到的照片效果如图53.4.2所示:
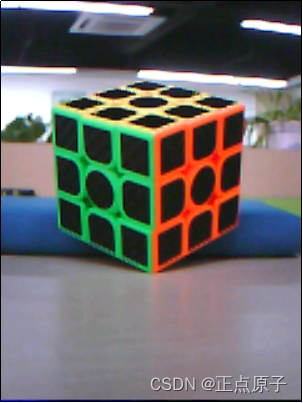
图53.4.2 拍照样图
最后,我们还可以通过USMART调用bmp_encode函数,实现串口控制拍照,还可以拍成各种尺寸哦(不过必须小于 240*320)!