环境:
本文主要使用kinova mico机械臂 + RealSense D435i深度相机进行了eye to hand的手眼标定。
系统环境:Ubuntu18.04,ROS Melodic
硬件:Kinova mico,RealSense D435i
特别注意:经测试,本方法有效可行,好多博客里说的运行写好的标定launch文件后,只有两个rviz界面,而没有标定的rqt_easy_handeye问题也可以解决。
准备工作:如果ubuntu系统长时间未使用,
一. RealSense D435i安装
完成realsense驱动及其ros接口的安装测试,详细步骤查阅我前面写的ubuntu18.04安装Realsense D435i相机SDK及realsense-ros记录,为后期运行yolo v5作准备
二. Kinova-ROS安装
(1)安装kinova-ros接口
cd ~/cat_ws/src
git clone https://github.com/Kinovarobotics/kinova-ros.git kinova-ros
cd ~/cat_ws
catkin_make
注意:
1.我的工作空间名是cat_ws,
2. 如果git clone出错,是因为网络的原因,可以试着科学上网,或一直重复此步骤,这里就不教给大家科学上网的过程了
3.要通过 USB 访问 arm,要将 udev 规则文件 10-kinova-arm.rules从~/catkin_ws/src/kinova-ros/kinova_driver/udev复制到/etc/udev/rules.d/中:
cd cat_ws/src/kinova-ros
sudo cp kinova_driver/udev/10-kinova-arm.rules /etc/udev/rules.d/
(2)安装moveit
sudo apt-get install ros-melodic-moveit
sudo apt-get install ros-melodic-trac-ik
(3)验证机械臂和moveit可用:
cd cat_ws
source /devel.setup.bash
roslaunch kinova_bringup kinova_robot.launch kinova_robotType:=m1n6s300
#重新打开一个终端运行
roslaunch m1n6s300_moveit_config m1n6s300_demo.launch
三、手眼标定环境配置
1、aruco_ros安装
我一般都从github下载压缩包,然后解压到src,这样可以避免下错版本,我下载的都是melodic版本的。
也可以使用下面指令进行安装,但是不建议
cd ~/cat_ws/src
git clone -b melodic-devel https://github.com/pal-robotics/aruco_ros.git
cd ..
catkin_make
2、vision_visp / visp_hand2eye_calibration安装
sudo apt-get install ros-melodic-visp
cd ~/cat_ws/src
git clone -b melodic-devel https://github.com/lagadic/vision_visp.git
cd ..
catkin_make --pkg visp_hand2eye_calibration
3、easy_handeye安装
cd ~/cat_ws/src # replace with path to your workspace
git clone https://github.com/IFL-CAMP/easy_handeye
cd .. # now we are inside ~/catkin_ws
rosdep install -iyr --from-paths src
catkin_make
注:此处可能会报错:缺少transforms3d库。
执行命令
pip install transforms3d
但还是报错
 解决办法:更新一下pip,再安装
解决办法:更新一下pip,再安装
pip install --upgrade pip
然后重新在cat_ws文件夹下执行上述两个步骤:
pip install transforms3d
rosdep install -iyr --from-paths src
这一步是必须的,不然后面无法出现标定界面
四、手眼标定
1.准备aruco码
网址:https://chev.me/arucogen/
选项选择如下:
Dictionary: Original ArUco
Marker ID:582
Marker size:100
生成PDF之后,原尺寸打印
注:Dictionary必须选Original ArUco。ID和size选择其他选项的,要对应文件中修改成对应的参数(ID要是aruco文件夹中包含的ID)。
2.创建launch文件
注意:RealSense D435i相机和机械臂要分别启动,否则会报错!
在~/catkin_ws/src/easy_handeye/easy_handeye/launch文件夹下新建kinova_realsense.launch
如使用其他相机,将相机信息和图像改为对应相机发布的信息,将相机坐标系改为对应相机的坐标系。使用其他机械臂的,launch文件编写请参考其他博主进行编写。
<launch>
<arg name="namespace_prefix" default="kinova_d435i_handeyecalibration" />
<arg name="marker_size" value="0.1" />
<arg name="marker_id" value="582" />
<!-- start ArUco -->
<node name="aruco_tracker" pkg="aruco_ros" type="single">
<remap from="/camera_info" to="/camera/color/camera_info" />
<remap from="/image" to="/camera/color/image_raw" />
<param name="image_is_rectified" value="true"/>
<param name="marker_size" value="$(arg marker_size)"/>
<param name="marker_id" value="$(arg marker_id)"/>
<param name="reference_frame" value="camera_link"/>
<param name="camera_frame" value="camera_link"/>
<param name="marker_frame" value="camera_marker" />
</node>
<!-- start the robot -->
<include file="$(find kinova_bringup)/launch/kinova_robot.launch">
</include>
<include file="$(find m1n6s300_moveit_config)/launch/m1n6s300_demo.launch">
</include>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
</node>
<!-- start easy_handeye -->
<include file="$(find easy_handeye)/launch/calibrate.launch" >
<arg name="namespace_prefix" value="$(arg namespace_prefix)" />
<arg name="eye_on_hand" value="false" />
<arg name="tracking_base_frame" value="camera_link" />
<arg name="tracking_marker_frame" value="camera_marker" />
<arg name="robot_base_frame" value="m1n6s300_link_base" />
<arg name="robot_effector_frame" value="m1n6s300_link_6" />
<!--disable automatic robot movement-->
<arg name="freehand_robot_movement" value="false" />
<arg name="robot_velocity_scaling" value="0.5" />
<arg name="robot_acceleration_scaling" value="0.2" />
</include>
</launch>
3.参数修改
(1)将同目录下calibrate.launch文件中的第十三行move_group的default value改为arm;
<arg name="move_group" default="arm" doc="the name of move_group for the automatic robot motion with MoveIt!" />
2)sudo gedit ~/catkin_ws/src/easy_handeye/easy_handeye/src/easy_handeye/handeye_calibration_backend_opencv.py
# 将
import cv2
# 改为
import sys
sys.path.remove('/opt/ros/melodic/lib/python2.7/dist-packages')
import cv2
sys.path.append('/opt/ros/melodic/lib/python2.7/dist-packages')
4.手眼标定
(1)将aruco码固定在joca2机械臂的末端;
(2)启动RealSense D435i深度相机;
roslaunch realsense2_camera rs_camera.launch
(3)启动kinova_realsense.launch;
roslaunch easy_handeye kinova_realsense.launch
(4)配置成功会出现以下三个图;
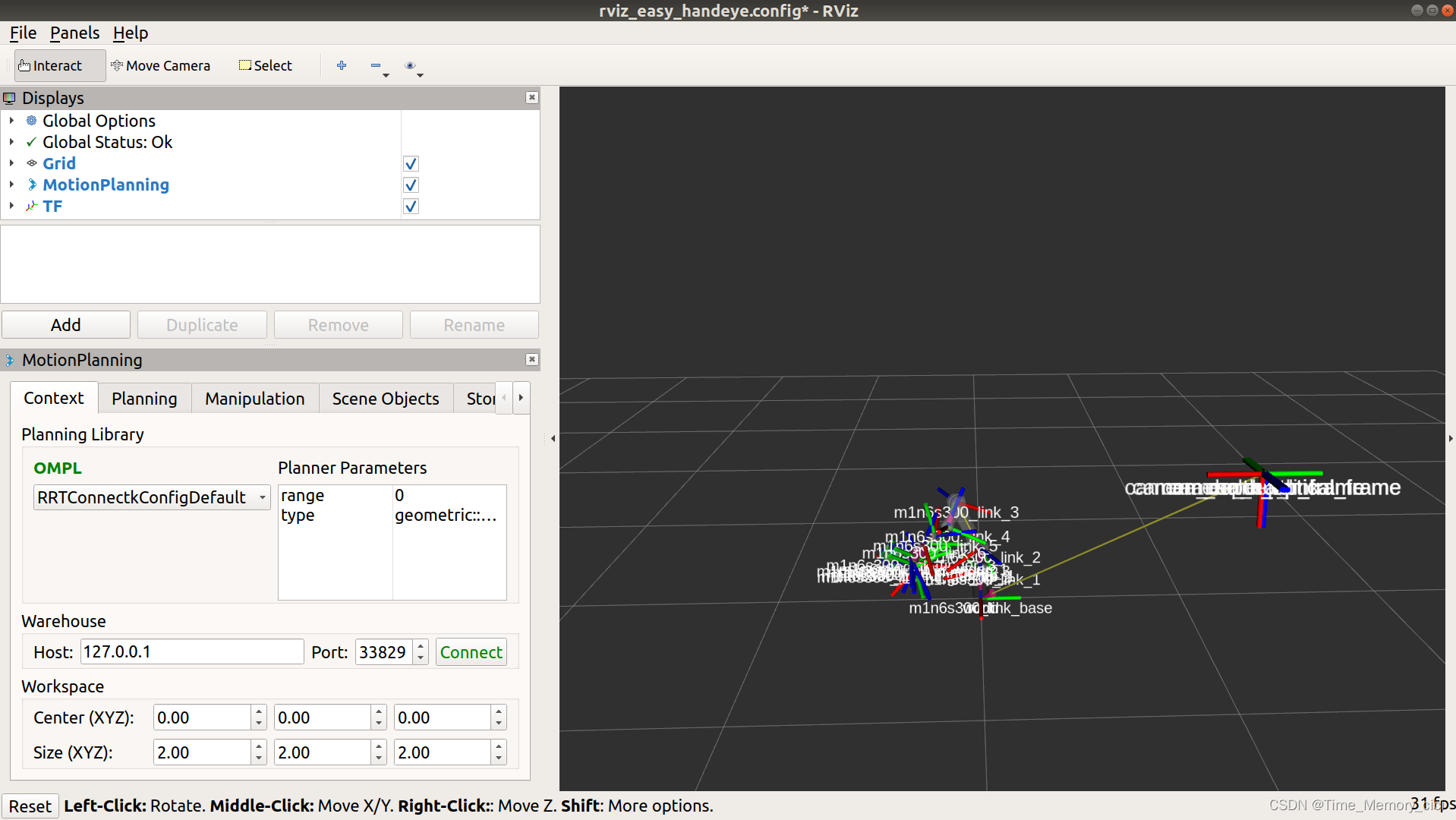
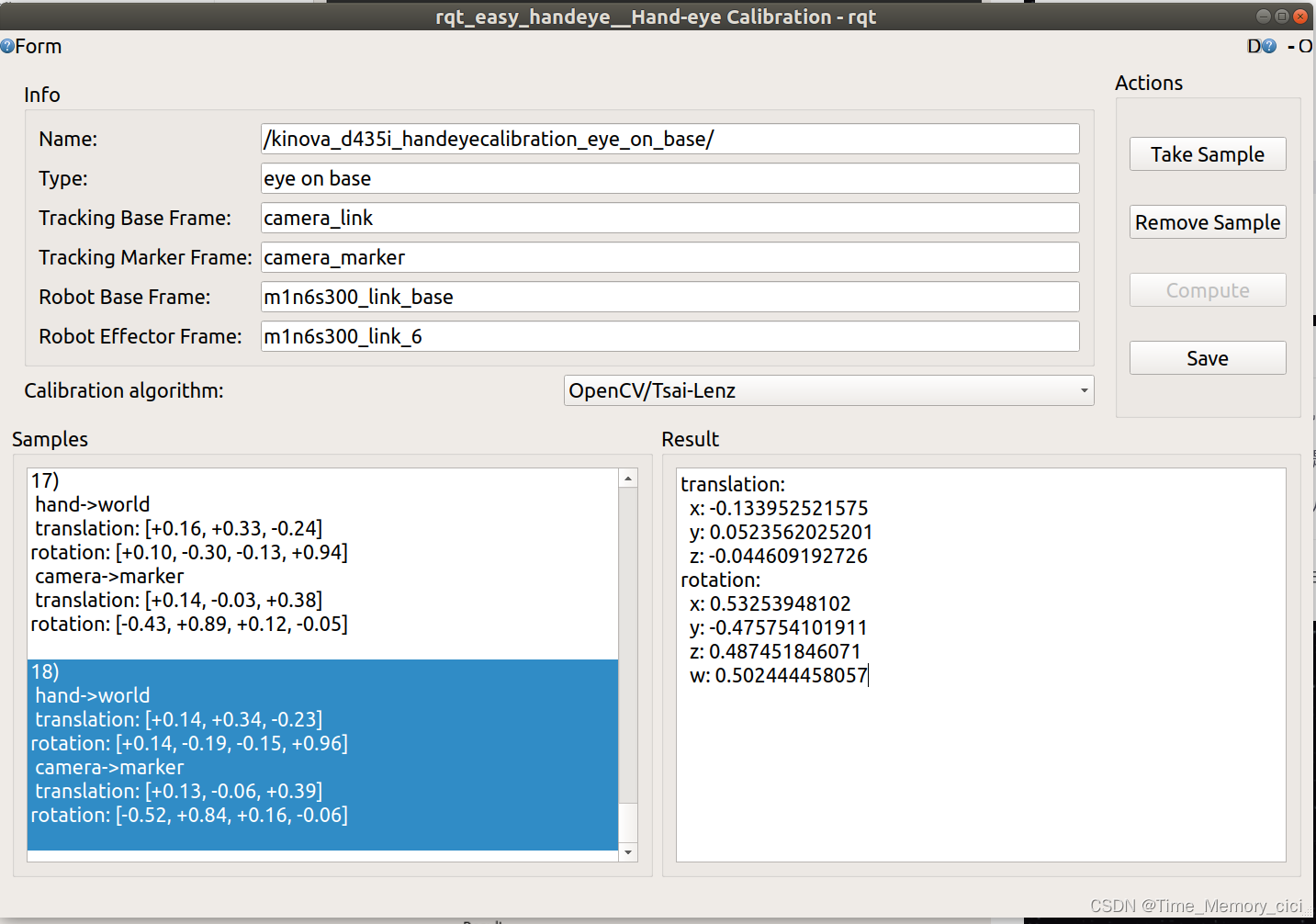
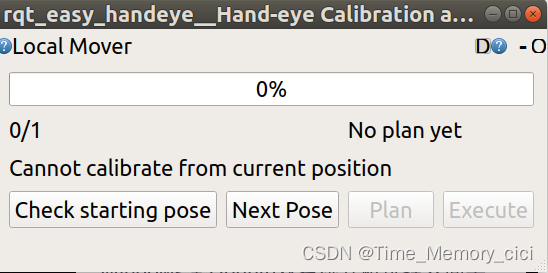 kinova机械臂Check starting pose不好用,所以第三张图片的内容用不到,我是使用遥控的方法,调整标定板的位置。
kinova机械臂Check starting pose不好用,所以第三张图片的内容用不到,我是使用遥控的方法,调整标定板的位置。
如果没有出现image_view,就另打开终端,运行rqt指令。在打开的窗口选择plugins->Visualization->image_View,打开image_view界面。选择/aruco_ros/tracker/result话题,确认能检测到aruco码。
遥控调整机械臂的位置,调整一次,采样一次,采样17次后,点击compute,得到坐标转换关系。
完结 撒花~~