以前的翻译文章,存档。翻译自:https://www.tomdalling.com/blog/modern-opengl/explaining-homogenous-coordinates-and-projective-geometry/, 有改动
在本文中,我将尽可能简单地解释齐次坐标(即4D坐标)。在之前的文章中,我们用了4D向量来做矩阵乘法,但是我从来没有真正定义过四维数。现在是时候近距离观察投影几何了。
术语
在使用3D技术的大多数时候,我们都在考虑欧几里得几何的关系——即三维空间中的坐标(X、Y、Z)。然而,在某些情况下,用投影几何学来思考是有用的。投影几何除了X、Y和Z之外有一个额外的维度,叫做W。这个四维空间称为“投影空间(projective space)”,投影空间中的坐标称为“齐次坐标(homogeneous coordinates)”。
不是四元数
四元数看起来很像齐次坐标。它们都是4D向量,通常表示为(X,Y,Z,W)。然而,四元数和齐次坐标是不同的概念,有不同的用途。
与2D的一个类比
首先,让我们看看投影几何是如何在2D中工作的,然后再看3D。
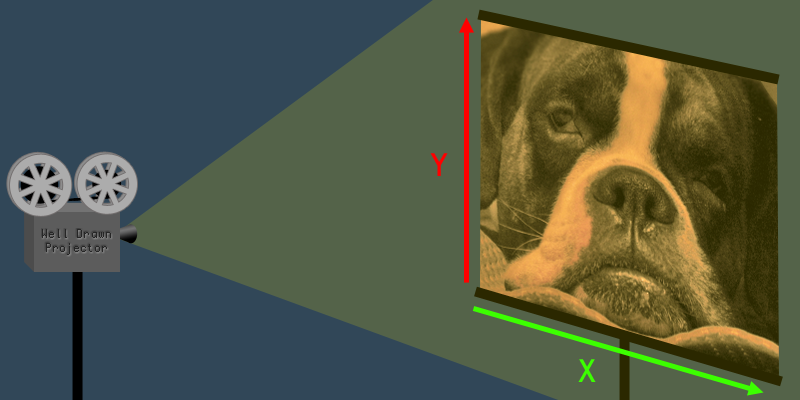
想象一个投影仪将二维图像投射到屏幕上。很容易看出投影图像的X和Y轴:
现在,如果你从这幅2D图像前后退一步,看向投影仪和屏幕,你就可以看到W维。W维是指从投影仪到屏幕的距离。
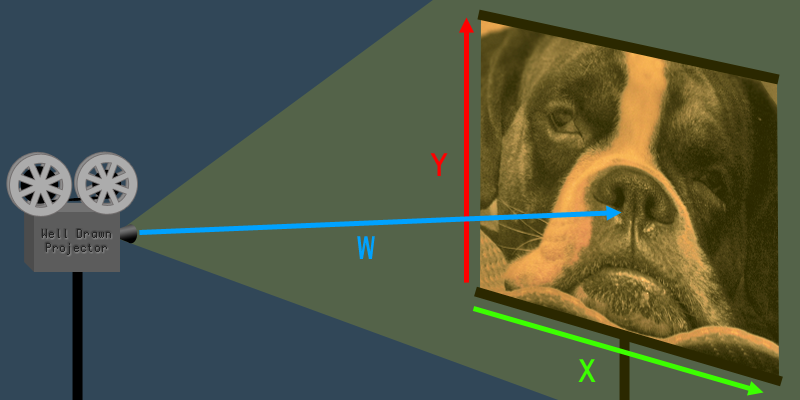
那么W维到底是做什么的呢?想象一下如果增加或减少W值——也就是说,如果增加或减少投影仪和屏幕之间的距离,二维图像会发生什么。如果你把投影仪靠近屏幕,整个2D图像就会变小。如果你把投影仪从屏幕移开,2D图像会变得更大。正如你所看到的,W的值影响图像的大小(也称为比例)。

应用于3D
目前还没有3D投影仪,所以很难想象3D的投影几何,但是W值的工作原理和2D是一样的。当W增加时,坐标放大。当W变小时,坐标缩小。W基本上是三维坐标的缩放变换。
当W = 1的时候
对于3D编程初学者通常的建议是,每当将3D坐标转换为4D坐标时,总是设置W=1。这样做的原因是当你把一个坐标缩放1倍时它不会收缩或放大,它会保持相同的大小。当W=1时它对X, Y, Z都没有影响。
因此,当涉及到3D计算机图形时,只有当W=1时,坐标才被认为是“正确的”。如果你用W>1表示坐标,那么所有东西看起来都太小了,而W< 1则所有东西看起来都太大了。如果你尝试用W=0渲染,当程序试图除以0时就会崩溃。在W< 0的情况下,所有的东西都会上下、前后颠倒的。
从数学上讲,不存在“不正确”的齐次坐标。使用W=1的坐标对于3D计算机图形来说只是一个有用的约定。
数学上
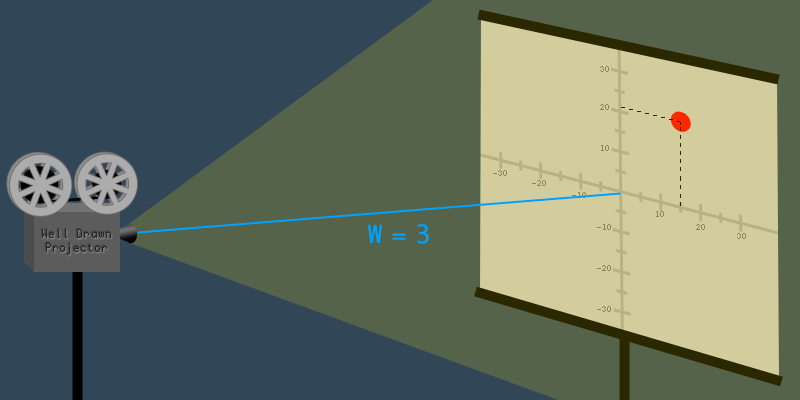
假设投影仪离屏幕3米远,在二维图像的坐标(15,21)处有一个点。这给出了投影坐标向量(X,Y,W)=(15,21,3)。
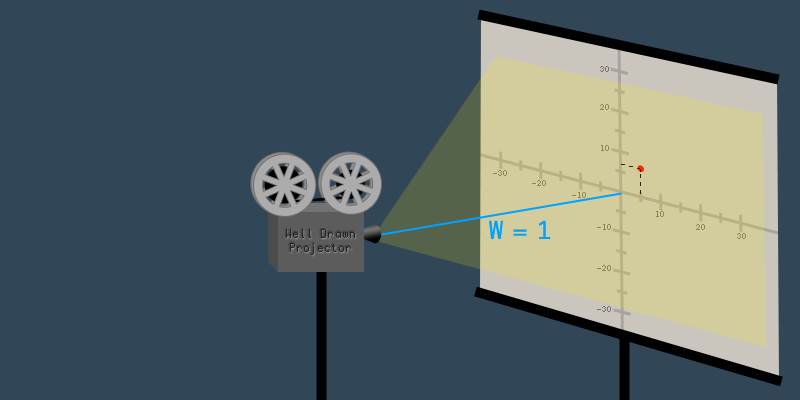
现在,假设投影仪被推得离屏幕更近,距离是1米。投影仪越接近屏幕,图像就越小。投影仪靠近了三倍,所以图像变小了三倍。如果取原来的坐标向量,把所有的值都除以3,就得到W=1的新向量:
( 15 3 , 21 3 , 3 3 ) = ( 5 , 7 , 1 ) (\frac{15}{3},\frac{21}{3},\frac{3}{3})=(5,7,1) (315,321,33)=(5,7,1)
则点目前的坐标(5,7).
这就是“不正确的”齐次坐标如何转换成“正确的”坐标的方法:将所有的值除以w。
将一个向量中的所有值除以标量乘以除数的倒数。这里有一个4D的例子:
1 5 ( 10 , 20 , 30 , 5 ) = ( 10 5 , 20 5 , 30 5 , 5 5 ) = ( 2 , 4 , 6 , 1 ) \frac{1}{5} (10, 20, 30, 5) = (\frac{10}{5}, \frac{20}{5}, \frac{30}{5}, \frac{5}{5}) = (2,4,6,1) 51(10,20,30,5)=(510,520,530,55)=(2,4,6,1)
使用GLM编写的c++示例如下:
glm::vec4 coordinate(10, 20, 30, 5);
glm::vec4 correctCoordinate = (1.0/coordinate.w) * coordinate;
//now, correctCoordinate == (2,4,6,1)
齐次坐标在计算机图形学中的应用
如上所述,对于3D计算机图形,齐次坐标在某些情况下是有用的。我们来看看这里的一些情况。
3D坐标的平移矩阵
旋转和缩放变换矩阵只需要三列。但是,为了进行平移,矩阵至少需要有四列。这就是为什么变换通常是4x4矩阵。然而,由于矩阵乘法的规则,一个四列的矩阵不能与一个三维向量相乘。一个四列矩阵只能与一个四元向量相乘,这就是为什么我们经常使用齐次的4D向量而不是三维向量。
在矩阵变换中使用齐次坐标时,第四维W通常是不变的。当将一个三维坐标转换成一个四维坐标时,w要设置为1,并且在变换矩阵被应用之后,它通常仍然是1,在这一点上,它可以通过忽略W来转换回三维坐标。这适用于所有的平移、旋转和缩放转换,它们是到目前为止最常见的转换类型。值得注意的例外是投影矩阵,它确实影响W值。
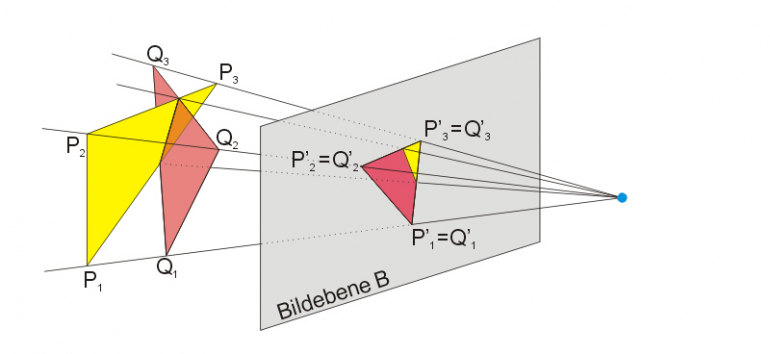
透视变换
在3D技术中,“透视”是指物体在距离相机越远的地方越小的现象。如果猫离摄像机足够近的话,远处的山看起来可能比猫还小。

透视在三维计算机图形中是通过使用变换矩阵来实现的,变换矩阵可以改变每个顶点的W值。将摄像机矩阵应用到每个顶点后,在投影矩阵应用之前,每个顶点的Z值表示距离摄像机的距离。因此,Z越大,顶点的比例就越小。W值影响比例,所以投影矩阵只是根据Z值改变W值。这里有一个透视投影矩阵应用于齐次坐标的例子:
[ 1 0 0 0 0 1 0 0 0 0 1 0 0 0 1 0 ] [ 2 3 4 1 ] = [ 2 3 4 4 ] \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix} \begin{bmatrix} 2 \\ 3 \\ 4 \\ 1 \end{bmatrix} = \begin{bmatrix} 2 \\ 3 \\ 4 \\ 4 \end{bmatrix} 1000010000110000 2341 = 2344
注意W值是如何从Z值变成4的。
应用透视投影矩阵后,每个顶点进行“透视分割”。透视图除法是将齐次坐标转换回W=1的一个特定术语,如本文前面所述。继续上面的例子,透视分割步骤如下:
1 4 ( 2 , 3 , 4 , 4 ) = ( 0.5 , 0.75 , 1 , 1 ) \frac{1}{4} (2, 3, 4, 4) = (0.5, 0.75, 1, 1) 41(2,3,4,4)=(0.5,0.75,1,1)
经过透视分割后,W值被丢弃,我们得到一个3D坐标,这就是根据3D透视投影被正确缩放的值。
在GLM中,这个透视投影矩阵可以使用GLM::perspective或GLM::frustum函数来创建。在老式的OpenGL中,它通常使用gluPerspective或gluFrustum函数创建。在OpenGL中,透视分割是在顶点着色器在每个顶点上运行之后自动发生的。这就是为什么gl_Position(顶点着色器的主要输出)是一个4D向量,而不是一个3D向量的原因之一。
放置方向光
齐次坐标的一个性质是它们允许你在无穷远(无限长度的向量)处有一点,这在三维坐标系中是不可能的。当W=0时,无穷远处的点就会出现。如果你试着把W=0齐次坐标转换成一个普通的W=1坐标,就会得到一系列的乘零运算:
1 0 ( 2 , 3 , 4 , 0 ) = ( 2 0 , 3 0 , 4 0 , 0 0 ) \frac{1}{0} (2, 3, 4, 0) = (\frac{2}{0}, \frac{3}{0}, \frac{4}{0}, \frac{0}{0}) 01(2,3,4,0)=(02,03,04,00)
这意味着W=0的齐次坐标不能转换为三维坐标。
这个能有什么用呢?方向光可以是无限远的点光源。当一个点光源无限远时,光线就会变得平行,所有的光都沿着一个方向传播。这就是方向光的定义。
所以传统上,在3D图形中,方向光与点光源的区别在于光源位置向量中W的值。如果W=1,那么它就是点光源。如果W=0,那么它就是一个方向光。
这更像是一种传统约定,而不是编写光照代码的有用方法。方向光和点光源通常用单独的代码实现,因为它们的行为不同。一个典型的光照着色器可能看起来是这样的:
if(lightPosition.w == 0.0){
//directional light code here
} else {
//point light code here
}
总结
齐次坐标有一个额外的维度W,它可以缩放X,Y和Z的值。用于平移和透视投影变换的矩阵只能应用于齐次坐标,这就是为什么它们在3D计算机图形中如此常见。当W=1时,X、Y和Z值被认为是“正确的”。任何齐次坐标都可以通过四维数除以W值来转换为W=1,除非W=0。当W=0时,坐标表示无穷远处的点(一个无限长的矢量),这通常用来表示方向光的方向。












![(文件[夹]批量分类整理_多级匹配_交叉匹配_路径结构交叉调整)文件[夹]批量复制](https://img-blog.csdnimg.cn/481ae9f3e5174a4a8d3777dc62f4814b.png)