问题
当我使用python程序控制机械臂作笛卡尔空间运动时,让其轨迹在空间中画一个正方形,具体程序如下
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy, sys
import moveit_commander
from moveit_commander import MoveGroupCommander
from geometry_msgs.msg import Pose
from copy import deepcopy
class MoveItCartesianDemo:
def __init__(self):
# 初始化move_group的API
moveit_commander.roscpp_initialize(sys.argv)
# 初始化ROS节点
rospy.init_node('moveit_line_demo', anonymous=True)
# 初始化需要使用move group控制的机械臂中的arm group
arm = MoveGroupCommander('arm_group')
# 当运动规划失败后,允许重新规划
arm.allow_replanning(True)
# 设置目标位置所使用的参考坐标系
arm.set_pose_reference_frame('base_link')
# 设置位置(单位:米)和姿态(单位:弧度)的允许误差
arm.set_goal_position_tolerance(0.001)
arm.set_goal_orientation_tolerance(0.001)
# 设置允许的最大速度和加速度
arm.set_max_acceleration_scaling_factor(0.5)
arm.set_max_velocity_scaling_factor(0.5)
# 获取终端link的名称
end_effector_link = arm.get_end_effector_link()
# 控制机械臂先回到初始化位置
arm.set_named_target('zero_pose')
arm.go()
rospy.sleep(1)
# 获取当前位姿数据最为机械臂运动的起始位姿
start_pose = arm.get_current_pose(end_effector_link).pose
# 初始化路点列表
waypoints = []
# 将初始位姿加入路点列表
waypoints.append(start_pose)
# 设置路点数据,并加入路点列表
wpose = deepcopy(start_pose)
# wpose.position.z -= 0.2
# waypoints.append(deepcopy(wpose))
wpose.position.x += 0.20
waypoints.append(deepcopy(wpose))
wpose.position.z -= 0.2
waypoints.append(deepcopy(wpose))
wpose.position.x += 0.20
waypoints.append(deepcopy(wpose))
wpose.position.y += 0.20
waypoints.append(deepcopy(wpose))
wpose.position.x -= 0.20
waypoints.append(deepcopy(wpose))
wpose.position.y -= 0.20
waypoints.append(deepcopy(wpose))
wpose.position.z += 0.2
waypoints.append(deepcopy(wpose))
wpose.position.x -= 0.20
waypoints.append(deepcopy(wpose))
fraction = 0.0 #路径规划覆盖率
maxtries = 100 #最大尝试规划次数
attempts = 0 #已经尝试规划次数
# 设置机器臂当前的状态作为运动初始状态
arm.set_start_state_to_current_state()
# 尝试规划一条笛卡尔空间下的路径,依次通过所有路点
while fraction < 1.0 and attempts < maxtries:
(plan, fraction) = arm.compute_cartesian_path (
waypoints, # waypoint poses,路点列表
0.01, # eef_step,终端步进值
0.0, # jump_threshold,跳跃阈值
True) # avoid_collisions,避障规划
# 尝试次数累加
attempts += 1
# 打印运动规划进程
if attempts % 10 == 0:
rospy.loginfo("Still trying after " + str(attempts) + " attempts...")
# 如果路径规划成功(覆盖率100%),则开始控制机械臂运动
if fraction == 1.0:
rospy.loginfo("Path computed successfully. Moving the arm.")
arm.execute(plan)
rospy.loginfo("Path execution complete.")
# 如果路径规划失败,则打印失败信息
else:
rospy.loginfo("Path planning failed with only " + str(fraction) + " success after " + str(maxtries) + " attempts.")
rospy.sleep(1)
# 控制机械臂先回到初始化位置
arm.set_named_target('zero_pose')
arm.go()
rospy.sleep(2)
# 关闭并退出moveit
moveit_commander.roscpp_shutdown()
moveit_commander.os._exit(0)
if __name__ == "__main__":
try:
MoveItCartesianDemo()
except rospy.ROSInterruptException:
pass
当程序到这条语句时
arm.execute(plan)
会报错误
[ INFO] [1688782916.965162097, 74.726000000]: ABORTED: CONTROL_FAILED
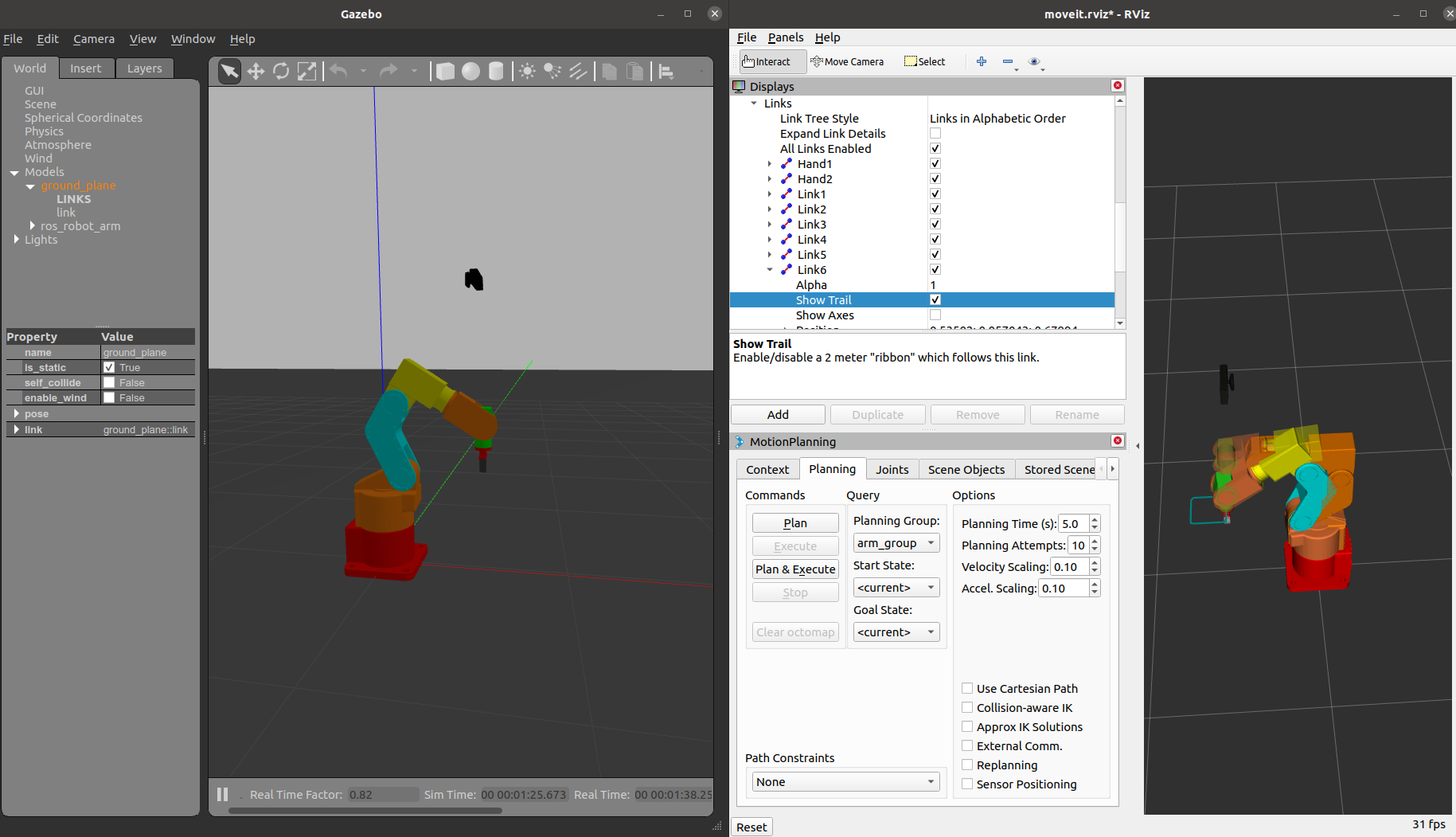
具体表现在,在rviz的moveit界面机械臂会出现轨迹虚影,而Gazebo中却不执行,即规划成功,运动失败

解决方案
解决方案就是把waypoints中的第一个点删除,即注释掉下面这条语句
# 将初始位姿加入路点列表
waypoints.append(start_pose)