一、前言
此示例演示如何检测使用校准的立体摄像头拍摄的视频中的人物,并确定他们与摄像头的距离。
二、加载立体摄像机的参数
加载对象,这是使用应用程序或函数校准相机的结果。
三、创建视频文件阅读器和视频播放器
创建用于读取和显示视频的系统对象。
四、读取和校正视频帧
必须校正来自左侧和右侧摄像机的帧,以便计算视差并重建 3D 场景。校正后的图像具有水平的外极线,并且行对齐。这通过将匹配点的搜索空间减少到一个维度来简化视差的计算。校正后的图像也可以组合成立体图,可以使用立体红青色眼镜查看3D效果。

五、计算差异
在校正立体图像中,任何一对对应的点都位于同一像素行上。对于左侧图像中的每个像素,计算到右侧图像中相应像素的距离。这个距离称为视差,它与相应世界点与相机的距离成正比。
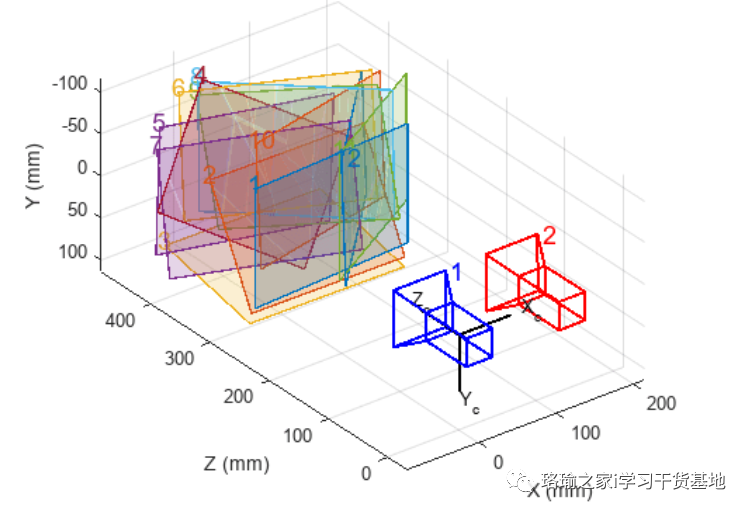
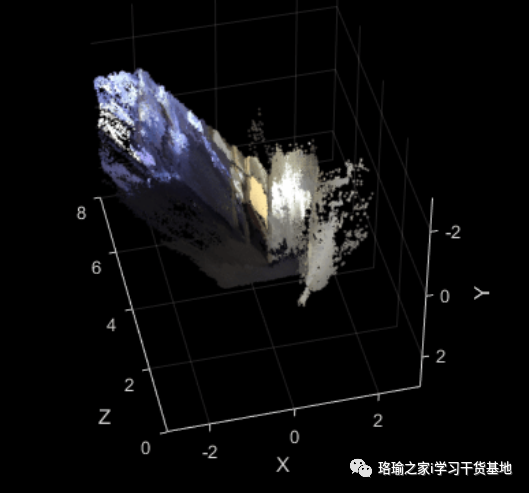
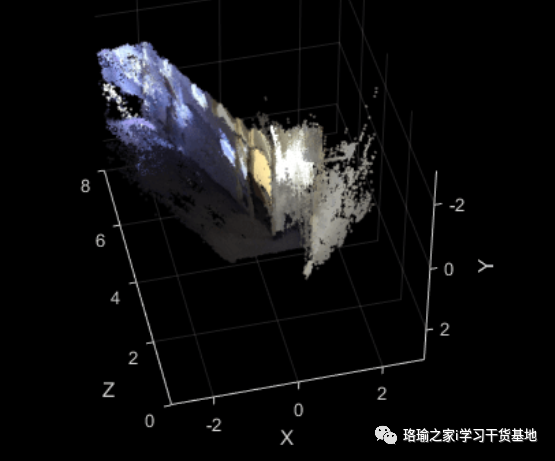
六、重建三维场景
从视差图中重建对应于每个像素的点的 3-D 世界坐标。
七、检测左图中的人物
使用系统对象检测人员。
八、确定每个人到相机的距离
查找每个检测到的人的质心的 3-D 世界坐标,并计算从质心到相机的距离(以米为单位)。

九、处理视频的其余部分
应用上述步骤来检测人员,并在视频的每一帧中测量他们与摄像机的距离。

十、总结
此示例展示了如何使用校准的立体摄像头在 3D 模式下定位行人。
十一、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
程序有偿获取:评论区下留言,博主看到会私信你。