相机模型存在4个坐标系:世界坐标系、摄像机坐标系、图像物理坐标系和图像像素坐标系。
光心:图像的中心。
光轴:穿过图像的光心,与图像平面垂直的轴。
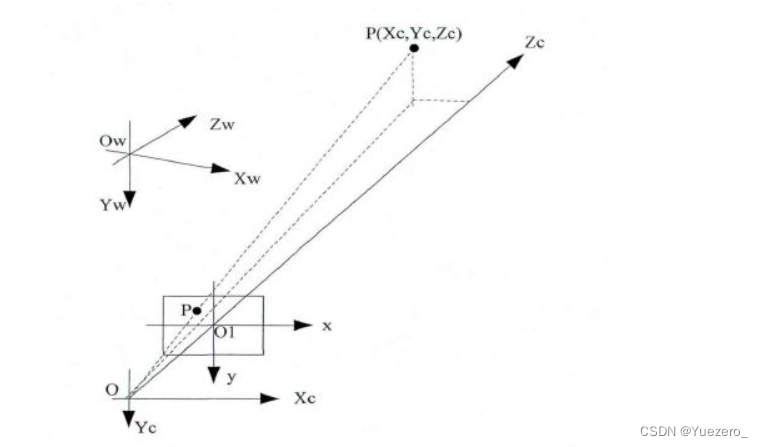
- 世界坐标系(Xw,Yw,Zw):是客观三维世界的绝对坐标系,也称客观坐标系,就是物体在真实世界中的坐标,世界坐标系是随着物体的大小和位置变化的,单位是长度单位
- 相机坐标系(Xc,Yc,Zc):以
相机的光心为坐标原点,以平行于图像的x和y方向为x轴和y轴,z轴和光轴平行,x, y,z互相垂直,单位是长度单位。 - 图像物理坐标系(X,Y):以
主光轴Zc和图像平面交点为坐标原点,x’和y’方向如图所示,单位是长度单位。 - 图像像素坐标系(Xc,Yc):以
图像的上/下/左/右顶点为坐标原点,u和v方向平行于x’和y’方向,单位是像素。(图像物理坐标系和像素坐标系仅通过平移可重合)
为什么空间坐标系之间的线性变换关系 = 坐标轴向量堆叠?
从线性代数的角度来解释,三个轴向量按列排列形成一个3x3的矩阵,这个矩阵可以表示空间坐标系之间的线性变换关系。在这种情况下,这个矩阵可以表示从世界坐标系到相机坐标系的转换。
在三维空间中,我们通常使用右手坐标系来描述物体的位置和方向。对于一个相机坐标系来说,它的三个轴向量(通常是单位向量)分别表示相机的右、上和前方向。
考虑一个点P在世界坐标系中的表示为列向量[Px, Py, Pz],通过乘以转换矩阵R可以将其转换到相机坐标系中的表示为列向量[Cx, Cy, Cz],即:
[Cx, Cy, Cz] = R * [Px, Py, Pz]
其中,R是一个3x3的矩阵,表示从世界坐标系到相机坐标系的转换。矩阵R的每一列分别对应相机坐标系的三个轴向量。
通过矩阵乘法运算,可以将世界坐标系中的点P转换到相机坐标系中的点C。这个过程实质上是对点P进行了旋转和平移操作,使得点P相对于相机坐标系的原点发生了变化。
因此,将三个轴向量按列排列形成一个3x3的矩阵,可以方便地表示空间坐标系之间的线性变换关系,从而实现将世界坐标系中的点转换到相机坐标系中的点。



![pyodbc读取.mdb文件时出现[ODBC Microsoft Access Driver] 网络访问已中断。请关闭数据库.....解决方法](https://img-blog.csdnimg.cn/79f0945684ea4470adfc488fab45554e.png)