当前,自动驾驶行业的内卷已是不争的事实。无论是以叠加传感器为手段的“堆料”,还是以测试里程论性能高低的“堆数据”,最终都指向了同一个问题:感知瓶颈。随着自动驾驶行业越来越趋于理性,技术的研发也将回归最基础的本源。
近日,复睿智行在上海举办产品发布会,首次发布了自主研发的高性能4D毫米波雷达系列产品,以及以4D毫米波雷达与前融合算法为核心的融合感知方案,力图从基础感知出发,推动自动驾驶的商业化落地。
高性能4D毫米波雷达:
为自动驾驶感知开启新大陆
在自动驾驶的核心传感器中,摄像头、毫米波雷达和激光雷达各有所长。其中,毫米波雷达能探测距离、方位、速度三个维度的信息,还具有全天候和低成本的优势,但由于无法测高,导致其无法精准判断关键的静止物体。4D毫米波雷达的诞生,改变了毫米波雷达这一缺陷,新增的D(维度)正是弥补之前测高缺陷的俯仰角探测能力,使其一跃成为破解ADAS/自动驾驶感知瓶颈的新希望。
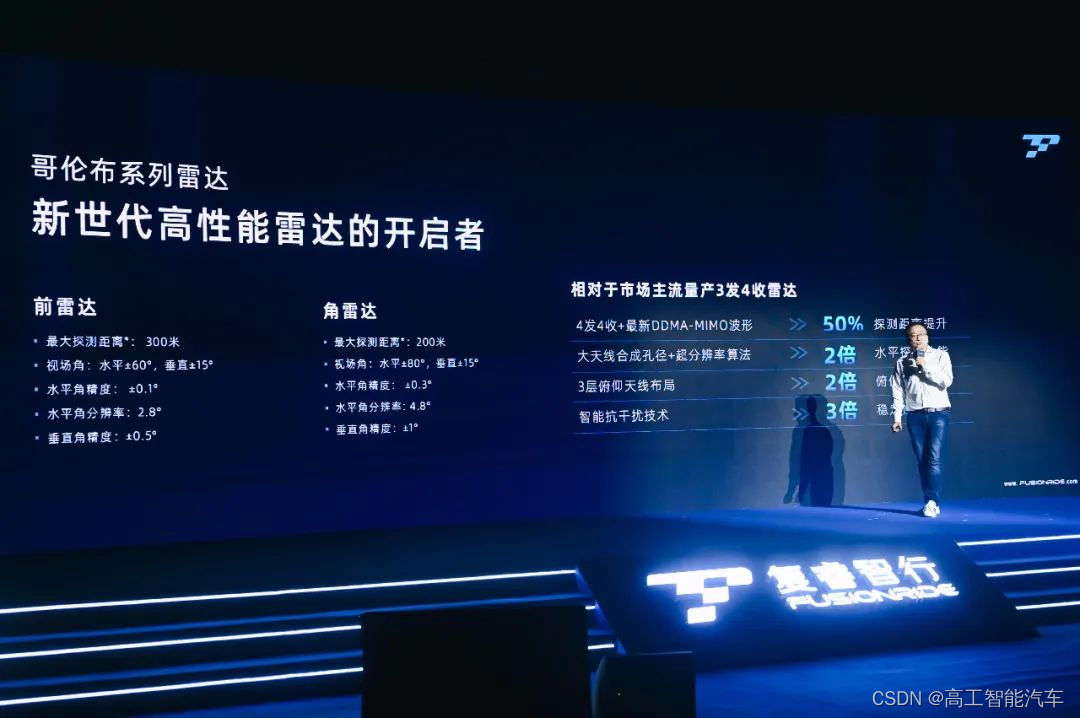
在复睿智行产品发布会上,复睿智行首席技术官周轶博士对外公布了公司首个高性能4D毫米波雷达产品——哥伦布系列雷达。他将之定义为新世代高性能雷达的开启者,希望这款产品能如其代号一样,为自动驾驶的探索之路开启一片新大陆。
作为一款非成像4D雷达,从参数看,哥伦布雷达的性能足以比肩国际头部厂商最新一代产品。其前雷达版本的最大探测距离达到300米,水平视场角120°,分辨率低至2.8°,垂直视场角±15°,垂直角精度低至±0.5°;角雷达最大探测距离达到200米,水平视场角160°,分辨率低至4.8°,垂直视场角±15°,垂直角精度低至±1°。

据周轶博士介绍,哥伦布系列是市面上第一款使用四发四收解决方案的雷达,且这款雷达在波形上采用最新一代DDMA-MIMO波形,配合大天线合成孔径+超分辨率算法、3层俯仰天线布局以及智能抗干扰技术,使得产品相较市场主流的3发4收雷达,具有50%的探测距离提升,2倍的水平探测性能提升,2倍的俯仰性能提升以及3倍的稳定性提升。
作为基础版(Standard),哥伦布系列预计将于2023年第二季度开始量产。同时,复睿智行另两款4D成像雷达也已蓄势待发。它们分别是6发8收、最大探测距离可达350米的毕加索(Advanced)系列,以及12发16收、最大探测距离可达400米的毕加索(Premium)。这两款产品预计都将在2023年四季度开始量产。
周轶博士表示:“在自动驾驶的核心传感器中,摄像头已经成为一个标准件,它的核心解决方案实际上已在融合算法里面,已经得到了实现。而激光雷达,复星投资的汽车生态内已经有很多优秀的企业,我们作为一家复星生态企业能很好地与它们进行协同。复睿智行要做的,就是中国乃至世界最好的4D毫米波雷达,并用最前沿的前后融合感知算法解决自动驾驶落地的问题。”
在主机厂关心的成本方面,周轶博士认为,复睿智行的4D毫米波雷达能带来更强大的融合感知能力,更好地实现软硬件高度统一,同时减少激光雷达和摄像头的使用数量。配合复睿智行的前融合感知算法,复睿智行与主机厂协同研发,打造定制化方案,帮助主机厂商节约至少50%的量产成本,来实现L2+、L3、L4的量产工作。

值得一提的是,周轶博士毕业于德国Wuppertal大学,从2010年起就开始从事自动驾驶的研发和量产工作,从德国海拉到奥托立夫维宁尔,从雷达天线、波形、型号处理到功能开发,从L0/L1辅助驾驶到带领维宁尔全球团队完成中国首个L3准量产项目,周轶博士对整个自动驾驶的子系统和系统的研发都以研发者和管理者全程参与。加入复睿智行之前,周轶博士在英国捷豹路虎总部作为自动驾驶部门高级经理,分别负责整个自动驾驶子系统和系统的供应商选择和全系的自动驾驶功能量产工作。
复睿智行成立于2021年9月,其研发团队汇集了全球自动驾驶领域的资深专家,且近七成员工拥有OEM、Tier1背景,目前已在伦敦、慕尼黑、上海、成都等多地设立研发中心,并与吉林大学、德国慕尼黑工业大学、多特蒙德应用科技大学、英国伯明翰大学等多所知名院校开展研究合作,具备全球化研发能力与量产经验。
软硬一体打造全路况、全天候、全场景、全目标识别的前融合算法
硬件获得革命性突破之后,软件自然指日可待。由于传统毫米波雷达的技术限制,摄像头一直占据主导地位,激光雷达虽然有更高的分辨率,但却具备成本和能耗的问题。而随着4D毫米波雷达的出现,前融合算法成为了最有潜力的感知解决方案,有望加速自动驾驶的落地。
周轶博士解释道,市场上常见的后融合算法是对不同传感器各自识别结果的融合,而前融合算法是对传感器原始探测信息的融合,不会滤去任何信息。好比把毫米波雷达当做一个低分辨率的相机,照一张相,可以直接构成一个三维空间,虽然精度不高,但有景深信息,知道哪里有障碍物。而如果把高清晰度摄像头的2D图象在三维空间进行投影,会实现一个非常高清晰度3D空间。

复睿智行采用自研高性能4D毫米波雷达来开发前融合算法,不仅确保了体系中雷达的性能和质量,还可以最大程度地释放雷达对算法的支持,形成软硬件高度统一的融合感知系统。
基于自研4D毫米波雷达+前融合感知算法的强力组合,复睿智行的感知方案能提供像素级别的深度信息以及精确的目标形状,也可以解决非常见目标检测的数据样本不足的问题,因为即使摄像头不知道目标是什么,毫米波雷达也能知道它在哪里,形状是如何,运动还是静止,以怎样的速度在运行,从而对外界目标实现非常精确的探测。
基于此,复睿智行的融合感知能力可以支持全路况,不管是高速、国道、高低架桥还是乡村小路;全天候,因为方案融合了毫米波雷达、摄像头、激光雷达;全场景,可以满足从L0到了L4所有自动驾驶功能的感知需求;以及全目标的识别,无论是很小的目标还是很大的目标,都会提供像素级别的深度信息。
 当前,尽管自动驾驶因L3、L4级迟迟无法落地而遭遇寒冬,但L2的春天似乎正在悄然而至。根据《高工智能汽车研究院》数据显示,2022年中国市场(不含进出口)乘用车前装标配搭载L2级辅助驾驶的搭载率已经连续第二个月超过30%。其中,1-10月新能源汽车前装标配搭载L2级辅助驾驶交付上险167.51万辆,前装搭载率首次突破40%。
当前,尽管自动驾驶因L3、L4级迟迟无法落地而遭遇寒冬,但L2的春天似乎正在悄然而至。根据《高工智能汽车研究院》数据显示,2022年中国市场(不含进出口)乘用车前装标配搭载L2级辅助驾驶的搭载率已经连续第二个月超过30%。其中,1-10月新能源汽车前装标配搭载L2级辅助驾驶交付上险167.51万辆,前装搭载率首次突破40%。
L2、L3、L4本质上只是一种人为的命名,真正的驱动力来自市场的需求:当消费者不再看重驾驶是否自动,而关注起产品如何真正提升他们的出行安全和效率时,曾经“冒进”的技术也开始回归理性。