程序基于(A minimal example showing how to use PyBullet from C++ over shared memory.一个展示如何在共享内存上从c++使用PyBullet的最小示例。
https://github.com/erwincoumans/pybullet_cpp_sharedmemory_example
)实现与pybullet服务器通信交互。加上MR的算法库进行pybullet交互仿真。MR的参数放在json文件内,通过jsoncpp库实现参数解析。
------------------------------------------------------------------------------
本篇内容
Python打开bullet服务器GUI
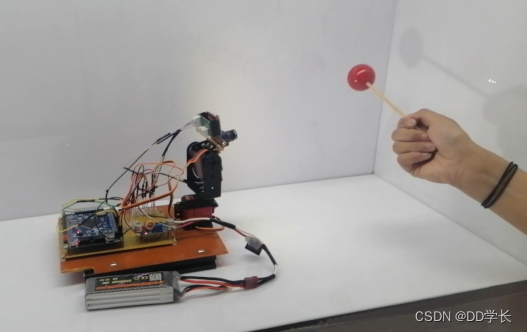
仿真视频
首先终端打开pybullet服务器GUI(以便C++ bullet客户端连接):
运行C++ bullet客户端(主程序代码):
读取的MR参数文件--控制台输出:
注:遇到Json读取MR参数文件报错string too long。需要
indy7类实现了以下功能:
------------------------------------------------------------------------------
 Python打开bullet服务器GUI
Python打开bullet服务器GUI
仿真视频
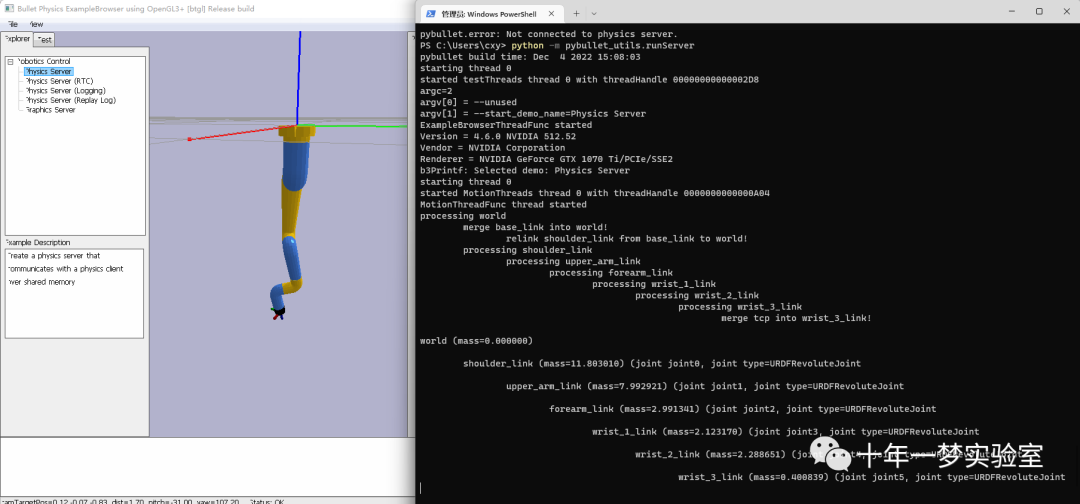
首先终端打开pybullet服务器GUI(以便C++ bullet客户端连接):
PS C:\Users\cxy> python -m pybullet_utils.runServer
pybullet build time: Dec 4 2022 15:08:03
starting thread 0
started testThreads thread 0 with threadHandle 00000000000002D8
argc=2
argv[0] = --unused
argv[1] = --start_demo_name=Physics Server
ExampleBrowserThreadFunc started
Version = 4.6.0 NVIDIA 512.52
Vendor = NVIDIA Corporation
Renderer = NVIDIA GeForce GTX 1070 Ti/PCIe/SSE2
b3Printf: Selected demo: Physics Server
starting thread 0
started MotionThreads thread 0 with threadHandle 0000000000000A04
MotionThreadFunc thread started
processing world
merge base_link into world!
relink shoulder_link from base_link to world!
processing shoulder_link
processing upper_arm_link
processing forearm_link
processing wrist_1_link
processing wrist_2_link
processing wrist_3_link
merge tcp into wrist_3_link!
world (mass=0.000000)
shoulder_link (mass=11.803010) (joint joint0, joint type=URDFRevoluteJoint
upper_arm_link (mass=7.992921) (joint joint1, joint type=URDFRevoluteJoint
forearm_link (mass=2.991341) (joint joint2, joint type=URDFRevoluteJoint
wrist_1_link (mass=2.123170) (joint joint3, joint type=URDFRevoluteJoint
wrist_2_link (mass=2.288651) (joint joint4, joint type=URDFRevoluteJoint运行C++ bullet客户端(主程序代码):






![[附源码]Python计算机毕业设计Django中小学课后延时服务管理系统](https://img-blog.csdnimg.cn/b0520916e2f84ee5b67eb60d12246dea.png)

![[Python图像处理] 合成微缩效果](https://img-blog.csdnimg.cn/94c810e61d9941febe07d16a6e9650d0.png#pic_center)