文章目录
- 一、简介
- 二、实现代码
- 三、实现效果
- 参考资料
一、简介
基于运动恢复结构(SfM)是指从一组二维图像中估计场景中三维结构的过程。SfM算法被用于许多应用程序,例如3D扫描、增强现实和视觉同步定位和映射(vSLAM)。
SfM可以用许多不同的方法来计算。处理问题的方式取决于不同的因素,例如所使用的相机的数量和类型,以及图像是否有序。如果图像是用单个校准的相机拍摄的,那么3d结构和相机运动只能恢复到按比例。按比例缩放意味着你可以重新调整相机运动的结构和大小,并且仍然保持观察结果。例如,如果你把相机靠近一个物体或者你当你把物体放大并且把相机移远,其实是看到同样的图像。如果你想用世界单位计算结构和运动的实际比例,你需要额外的信息,比如:
- 场景中对象的大小
- 来自另一个传感器的信息,例如里程计。
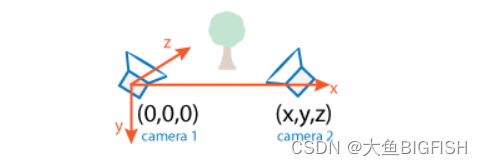
最简单的例子就是两个视图情形:即对于两个静止摄像机或一个移动摄像机结构的简单情况,可以想象一个视图为摄像机1,另一个视图为摄像机2。在这种情况下,算法假设相机1在原点,其光轴沿z轴。