【强化学习原理+项目专栏】必看系列:单智能体、多智能体算法原理+项目实战、相关技巧(调参、画图等、趣味项目实现、学术应用项目实现
专栏详细介绍:【强化学习原理+项目专栏】必看系列:单智能体、多智能体算法原理+项目实战、相关技巧(调参、画图等、趣味项目实现、学术应用项目实现
对于深度强化学习这块规划为:
- 基础单智能算法教学(gym环境为主)
- 主流多智能算法教学(gym环境为主)
- 主流算法:DDPG、DQN、TD3、SAC、PPO、RainbowDQN、QLearning、A2C等算法项目实战
- 一些趣味项目(超级玛丽、下五子棋、斗地主、各种游戏上应用)
- 单智能多智能题实战(论文复现偏业务如:无人机优化调度、电力资源调度等项目应用)
本专栏主要方便入门同学快速掌握强化学习单智能体|多智能体算法原理+项目实战。后续会持续把深度学习涉及知识原理分析给大家,让大家在项目实操的同时也能知识储备,知其然、知其所以然、知何由以知其所以然。
声明:部分项目为网络经典项目方便大家快速学习,后续会不断增添实战环节(比赛、论文、现实应用等)
-
专栏订阅(个性化选择):
-
强化学习原理+项目专栏大合集-《推荐订阅☆☆☆☆☆》
-
强化学习单智能体算法原理+项目实战《推荐订阅☆☆☆☆》
-
强化学习多智能体原理+项目实战《推荐订阅☆☆☆☆☆》
-
强化学习相关技巧(调参、画图等《推荐订阅☆☆☆》)
-
tensorflow_gym-强化学习:免费《推荐订阅☆☆☆☆》
-
强化学习从基础到进阶-案例与实践:免费《推荐订阅☆☆☆☆☆》
-
强化学习从基础到进阶-案例与实践[4.2]:深度Q网络DQN-Cart pole游戏展示
- 强化学习(Reinforcement learning,简称RL)是机器学习中的一个领域,区别与监督学习和无监督学习,强调如何基于环境而行动,以取得最大化的预期利益。
- 基本操作步骤:智能体
agent在环境environment中学习,根据环境的状态state(或观测到的observation),执行动作action,并根据环境的反馈reward(奖励)来指导更好的动作。
比如本项目的Cart pole小游戏中,agent就是动图中的杆子,杆子有向左向右两种action。
## 安装依赖
!pip install pygame
!pip install gym
!pip install atari_py
!pip install parl
import gym
import os
import random
import collections
import paddle
import paddle.nn as nn
import numpy as np
import paddle.nn.functional as F
1.经验回放部分
经验回放主要做的事情是:把结果存入经验池,然后经验池中随机取出一条结果进行训练。
这样做有两个好处:
- 减少样本之间的关联性
- 提高样本的利用率
之所以加入experience replay是因为样本是从游戏中的连续帧获得的,这与简单的reinforcement learning问题相比,样本的关联性大了很多,如果没有experience replay,算法在连续一段时间内基本朝着同一个方向做gradient descent,那么同样的步长下这样直接计算gradient就有可能不收敛。因此experience replay是从一个memory pool中随机选取了一些expeirence,然后再求梯度,从而避免了这个问题。
class ReplayMemory(object):
def __init__(self, max_size):
self.buffer = collections.deque(maxlen=max_size)
# 增加一条经验到经验池中
def append(self, exp):
self.buffer.append(exp)
# 从经验池中选取N条经验出来
def sample(self, batch_size):
mini_batch = random.sample(self.buffer, batch_size)
obs_batch, action_batch, reward_batch, next_obs_batch, done_batch = [], [], [], [], []
for experience in mini_batch:
s, a, r, s_p, done = experience
obs_batch.append(s)
action_batch.append(a)
reward_batch.append(r)
next_obs_batch.append(s_p)
done_batch.append(done)
return np.array(obs_batch).astype('float32'), np.array(action_batch).astype('float32'), np.array(reward_batch).astype('float32'), np.array(next_obs_batch).astype('float32'), np.array(done_batch).astype('float32')
def __len__(self):
return len(self.buffer)
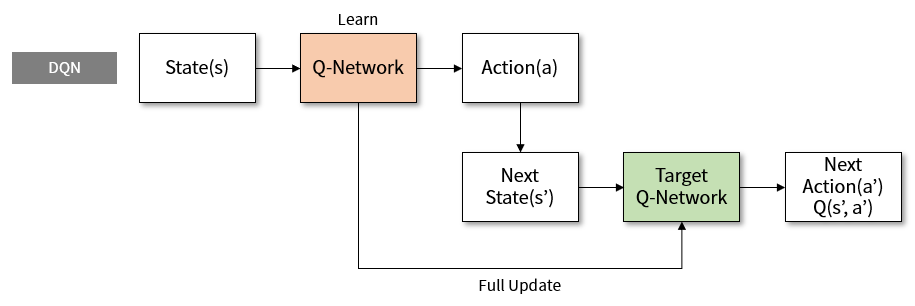
2.DQN
DQN算法较普通算法在经验回放和固定Q目标有了较大的改进,主要原因:
- 经验回放:他充分利用了off-colicp的优势,通过训练把结果(成绩)存入Q表格,然后随机从表格中取出一条结果进行优化。这样子一方面可以:减少样本之间的关联性另一方面:提高样本的利用率 注:训练结果会存进Q表格,当Q表格满了以后,存进来的数据会把最早存进去的数据“挤出去”(弹出)
- 固定Q目标他解决了算法更新不平稳的问题。 和监督学习做比较,监督学习的最终值要逼近实际结果,这个结果是固定的,但是我们的DQN却不是,他的目标值是经过神经网络以后的一个值,那么这个值是变动的不好拟合,怎么办,DQN团队想到了一个很好的办法,让这个值在一定时间里面保持不变,这样子这个目标就可以确定了,然后目标值更新以后更加接近实际结果,可以更好的进行训练。
3.模型Model
这里的模型可以根据自己的需求选择不同的神经网络组建。
DQN用来定义前向(Forward)网络,可以自由的定制自己的网络结构。
class DQN(nn.Layer):
def __init__(self, outputs):
super(DQN, self).__init__()
self.linear1 = nn.Linear(in_features=4, out_features=128)
self.linear2 = nn.Linear(in_features=128, out_features=24)
self.linear3 = nn.Linear(in_features=24, out_features=outputs)
def forward(self, x):
x = self.linear1(x)
x = F.relu(x)
x = self.linear2(x)
x = F.relu(x)
x = self.linear3(x)
return x
4.智能体Agent的学习函数
这里包括模型探索与模型训练两个部分
Agent负责算法与环境的交互,在交互过程中把生成的数据提供给Algorithm来更新模型(Model),数据的预处理流程也一般定义在这里。
def sample(obs, MODEL):
global E_GREED
global ACTION_DIM
global E_GREED_DECREMENT
sample = np.random.rand() # 产生0~1之间的小数
if sample < E_GREED:
act = np.random.randint(ACTION_DIM) # 探索:每个动作都有概率被选择
else:
obs = np.expand_dims(obs, axis=0)
obs = paddle.to_tensor(obs, dtype='float32')
act = MODEL(obs)
act = np.argmax(act.numpy()) # 选择最优动作
E_GREED = max(0.01, E_GREED - E_GREED_DECREMENT) # 随着训练逐步收敛,探索的程度慢慢降低
return act
def learn(obs, act, reward, next_obs, terminal, TARGET_MODEL, MODEL):
global global_step
# 每隔200个training steps同步一次model和target_model的参数
if global_step % 50 == 0:
TARGET_MODEL.load_dict(MODEL.state_dict())
global_step += 1
obs = np.array(obs).astype('float32')
next_obs = np.array(next_obs).astype('float32')
# act = np.expand_dims(act, -1)
cost = optimize_model(obs, act, reward, next_obs,
terminal, TARGET_MODEL, MODEL) # 训练一次网络
return cost
def optimize_model(obs, action, reward, next_obs, terminal, TARGET_MODEL, MODEL):
"""
使用DQN算法更新self.model的value网络
"""
# 从target_model中获取 max Q' 的值,用于计算target_Q
global E_GREED
global ACTION_DIM
global E_GREED_DECREMENT
global GAMMA
global LEARNING_RATE
global opt
opt = paddle.optimizer.Adam(learning_rate=LEARNING_RATE,
parameters=MODEL.parameters()) # 优化器(动态图)
obs = paddle.to_tensor(obs)
next_obs = paddle.to_tensor(next_obs)
next_pred_value = TARGET_MODEL(next_obs).detach()
best_v = paddle.max(next_pred_value, axis=1)
target = reward + (1.0 - terminal) * GAMMA * best_v.numpy()
target = paddle.to_tensor(target)
pred_value = MODEL(obs) # 获取Q预测值
# 将action转onehot向量,比如:3 => [0,0,0,1,0]
action = paddle.to_tensor(action.astype('int32'))
action_onehot = F.one_hot(action, ACTION_DIM)
action_onehot = paddle.cast(action_onehot, dtype='float32')
# 下面一行是逐元素相乘,拿到action对应的 Q(s,a)
pred_action_value = paddle.sum(paddle.multiply(action_onehot, pred_value), axis=1)
# 计算 Q(s,a) 与 target_Q的均方差,得到loss
cost = F.square_error_cost(pred_action_value, target)
cost = paddle.mean(cost)
avg_cost = cost
cost.backward()
opt.step()
opt.clear_grad()
return avg_cost.numpy()
5.模型梯度更新算法
def run_train(env, rpm, TARGET_MODEL, MODEL):
MODEL.train()
TARGET_MODEL.train()
total_reward = 0
obs = env.reset()
global global_step
while True:
global_step += 1
# 获取随机动作和执行游戏
action = sample(obs, MODEL)
next_obs, reward, isOver, info = env.step(action)
# 记录数据
rpm.append((obs, action, reward, next_obs, isOver))
# 在预热完成之后,每隔LEARN_FREQ步数就训练一次
if (len(rpm) > MEMORY_WARMUP_SIZE) and (global_step % LEARN_FREQ == 0):
(batch_obs, batch_action, batch_reward, batch_next_obs, batch_isOver) = rpm.sample(BATCH_SIZE)
train_loss = learn(batch_obs, batch_action, batch_reward,
batch_next_obs, batch_isOver, TARGET_MODEL, MODEL)
total_reward += reward
obs = next_obs.astype('float32')
# 结束游戏
if isOver:
break
return total_reward
def evaluate(model, env, render=False):
model.eval()
eval_reward = []
for i in range(5):
obs = env.reset()
episode_reward = 0
while True:
obs = np.expand_dims(obs, axis=0)
obs = paddle.to_tensor(obs, dtype='float32')
action = model(obs)
action = np.argmax(action.numpy())
obs, reward, done, _ = env.step(action)
episode_reward += reward
if render:
env.render()
if done:
break
eval_reward.append(episode_reward)
return np.mean(eval_reward)
6.训练函数与验证函数
设置超参数
LEARN_FREQ = 5 # 训练频率,不需要每一个step都learn,攒一些新增经验后再learn,提高效率
MEMORY_SIZE = 20000 # replay memory的大小,越大越占用内存
MEMORY_WARMUP_SIZE = 200 # replay_memory 里需要预存一些经验数据,再开启训练
BATCH_SIZE = 32 # 每次给agent learn的数据数量,从replay memory随机里sample一批数据出来
LEARNING_RATE = 0.001 # 学习率大小
GAMMA = 0.99 # reward 的衰减因子,一般取 0.9 到 0.999 不等
E_GREED = 0.1 # 探索初始概率
E_GREED_DECREMENT = 1e-6 # 在训练过程中,降低探索的概率
MAX_EPISODE = 20000 # 训练次数
SAVE_MODEL_PATH = "models/save" # 保存模型路径
OBS_DIM = None
ACTION_DIM = None
global_step = 0
def main():
global OBS_DIM
global ACTION_DIM
train_step_list = []
train_reward_list = []
evaluate_step_list = []
evaluate_reward_list = []
# 初始化游戏
env = gym.make('CartPole-v0')
# 图像输入形状和动作维度
action_dim = env.action_space.n
obs_dim = env.observation_space.shape
OBS_DIM = obs_dim
ACTION_DIM = action_dim
max_score = -int(1e4)
# 创建存储执行游戏的内存
rpm = ReplayMemory(MEMORY_SIZE)
MODEL = DQN(ACTION_DIM)
TARGET_MODEL = DQN(ACTION_DIM)
# if os.path.exists(os.path.dirname(SAVE_MODEL_PATH)):
# MODEL_DICT = paddle.load(SAVE_MODEL_PATH+'.pdparams')
# MODEL.load_dict(MODEL_DICT) # 加载模型参数
print("filling memory...")
while len(rpm) < MEMORY_WARMUP_SIZE:
run_train(env, rpm, TARGET_MODEL, MODEL)
print("filling memory done")
# 开始训练
episode = 0
print("start training...")
# 训练max_episode个回合,test部分不计算入episode数量
while episode < MAX_EPISODE:
# train part
for i in range(0, int(50)):
# First we need a state
total_reward = run_train(env, rpm, TARGET_MODEL, MODEL)
episode += 1
# print("episode:{} reward:{}".format(episode, str(total_reward)))
# test part
# print("start evaluation...")
eval_reward = evaluate(TARGET_MODEL, env)
print('episode:{} e_greed:{} test_reward:{}'.format(episode, E_GREED, eval_reward))
evaluate_step_list.append(episode)
evaluate_reward_list.append(eval_reward)
# if eval_reward > max_score or not os.path.exists(os.path.dirname(SAVE_MODEL_PATH)):
# max_score = eval_reward
# paddle.save(TARGET_MODEL.state_dict(), SAVE_MODEL_PATH+'.pdparams') # 保存模型
if __name__ == '__main__':
main()
filling memory…
filling memory done
start training…
episode:50 e_greed:0.0992949999999993 test_reward:9.0
episode:100 e_greed:0.0987909999999988 test_reward:9.8
episode:150 e_greed:0.09827199999999828 test_reward:10.0
episode:200 e_greed:0.09777599999999778 test_reward:8.8
episode:250 e_greed:0.09726999999999728 test_reward:9.0
episode:300 e_greed:0.09676199999999677 test_reward:10.0
episode:350 e_greed:0.0961919999999962 test_reward:14.8
项目链接fork一下即可运行
https://www.heywhale.com/mw/project/649e7d3f70567260f8f11d2b