在汽车智能化这场行业变革中,作为智能驾驶的标配,高精度定位系统已成L2级及以上智能驾驶“照进现实”进程中四两拨千斤的存在。
惯性测量单元IMU因其工作不依赖包括卫星在内的外界信号,已是智能汽车高精度定位系统的核心元器件。然而行业对于IMU应如何安装仍有探讨:究竟是以独立模块形态应用的独立IMU,或是焊接在域控制器主板上的贴片IMU更适合智能驾驶?
作为行业领先的定位感知解决方案供应商,导远电子用典型环境对比和长期环境影响对比两组实验回答这个问题,得出以下答案:
●独立IMU适合高精度导航定位及安全应用场景;适合具有航位推算需求场景。
●贴片IMU适合低精度导航定位及非安全应用场景;适合卫星导航算法插值场景。

结论是:独立IMU较贴片IMU在温度变化、预紧力、振动等典型环境及长期环境下性能更稳定,更加安全可靠。
IMU不仅仅是车载定位系统P-box的核心部件,也是智能汽车提升BEV性能,从而提升城市NOA性能的重要部件,这也要求IMU具备良好的稳定性和可靠性。
李楠博士表示,在更为错综复杂的行车环境下,性能更稳定可靠的产品带来的是更安全、优质的用户体验,因此独立IMU更适合智能驾驶。
实践出真知
两组实验针对影响车载IMU性能的四种典型环境和IMU生命周期中面临的长期环境进行模拟测试。
实验一 典型环境影响对比
导远电子实验视频
► 点击观看完整实验
实验方式:选取5个不同样本(4个贴片IMU+1个独立IMU),针对影响车载IMU性能的升温、降温、预紧力、振动4种典型环境进行模拟测试,观察独立IMU和贴片IMU输出角速度的零偏变化,以及对角速度积分后车体姿态的变化。

◎ 升温:使用同一功率的电吹风为两种形态IMU加热,直至相近温度
◎ 降温:使用速冻喷雾对两种形态IMU降温,直至相近温度
◎ 预紧力:保持两种形态IMU初始预紧力一致,通过改变安装螺钉的松紧来调整预紧力
◎ 振动:将来电振动手机靠近两种形态IMU外壳

► 升温影响

► 降温影响
在升温和降温实验中,独立IMU受益于外壳保护,温度变化较平缓,且陀螺输出角速度非常稳定,无明显零偏;贴片IMU则呈现出骤升骤降趋势,陀螺输出角速度变化明显,零偏明显增大,横滚角和航向角产生较大偏差,导致车体姿态异常,这对智能驾驶车身控制造成困难,可能引起安全事故。
备注:喷雾过程中,可视化界面的第一个窗口陀螺输出曲线的噪声变大,是由于喷雾剂喷雾对IMU的撞击。

在预紧力影响实验中,操作员通过螺丝刀先松开螺钉改变两种构型IMU预紧力,而后拧紧螺钉,让预紧力回到初始状态。此时,独立IMU非常平稳,贴片IMU的航向陀螺输出角速度产生较大变化,零偏明显,积分后的航向偏差接近4°。在行驶中,航向对定位精度至关重要。假设汽车在该状态下开启辅助驾驶直行100m,大约会产生6m的横向偏差,即横向偏出将近两个车道,存在交通事故的风险。

值得一提的是,即使是手机来电振动这样低量级的振动,都会导致贴片IMU约0.15°/s的航向陀螺零偏,积分十几秒后,引起大约2°的航向偏差。而在实际行车中,贴片IMU还需要克服PCB板形变应力、装配误差以及大幅度温度变化等诸多难题。
实验二 长期环境影响对比
实验方式:选取120个不同样本,通过3种耐久实验还原IMU在生命周期中面临的长期环境,观察其性能变化。

◎ 高温运行耐久:在85℃环境中通电恒温运行1000小时
◎ 热冲击耐久:在-40℃~85℃区间进行温度切换,温度交换时间≤30秒,每次保温20min,累计热冲击次数506次
◎ 通电温度循环耐久:在-40℃~85℃区间进行温度循环,温变速率保持4℃/min,每次保温20min,累计循环次数190次

► 陀螺标度误差变化
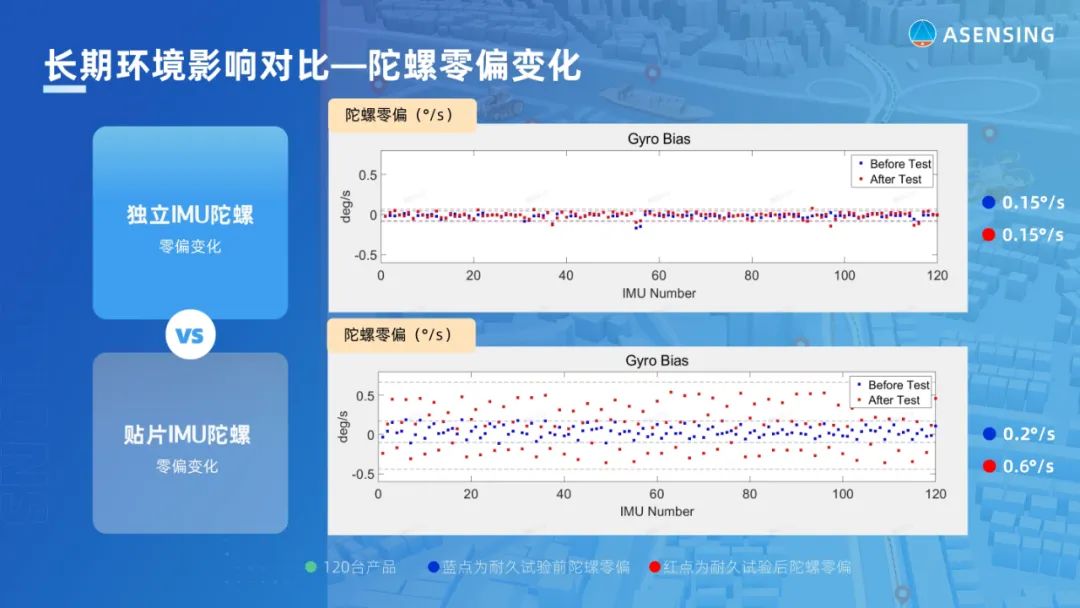
► 陀螺零偏变化
经耐久测试之后,独立IMU标度误差波动范围从1.2‰增至1.5‰,陀螺零偏波动范围基本保持0.15°/s不变;而贴片IMU标度误差波动范围从2.7‰达到5.5‰,增幅超一倍,陀螺零偏波动范围由0.2°/s变为0.6°/s,增幅达到两倍。
这些变化对汽车导航定位会产生多大的影响?以标度误差为例,假设汽车开启城市领航辅助驾驶在十字路口掉头,由于IMU产生了5‰的标度误差,会导致将近1°航向偏差,当汽车继续直行100m后,横向偏差将达到约1.7m,会偏离车道。

可以看到,长期环境对于有保护的独立IMU影响并不明显,性能更稳定;而贴片IMU由于缺乏保护,容易受到环境干扰。
总结
贴片IMU将IMU直接焊接到主板固定位置,通常无保护或采用屏蔽罩保护,虽然制造成本低,但容易受到环境影响,且受二次焊接影响还可能引起标定参数变化。
独立IMU配备高强度壳体保护,便于选择易维护位置安装,更重要的是,其采用全要素标定补偿,以及多物理场匹配技术,标定参数更加持久稳定,是性价比更高的选择。
智能汽车对于安全的严苛要求,注定需要安全可靠的定位系统,而当高精地图在智能驾驶中的作用和使用方式逐渐变化时,对定位的稳定性要求更胜一筹。
导远2016年开始专注于智能汽车领域,次年完成了自研高精度组合定位方案首次在智能汽车的Demo,获得第一个量产定点,开启组合定位上车的新时代。目前,导远已经形成以P-box系列、IMU模组、GNSS模组为核心的高精度定位产品矩阵,助力客户创造更高用户价值,共同驱动智能出行全新变革。

以高精度定位为起点,导远提供高精度组合定位、定位感知及人工智能物联网AIoT「三大」解决方案,适用场景和用户均不限于主机厂,赋能包括智慧交通、精准农业、工程机械、机器人、无人机测绘等城市生活和产业智能化的各个行业用户。