卷积是卷积神经网络中的核心模块,卷积的目的是提取输入图像的特征,如下图所示,卷积可以提取图像中的边缘特征信息。卷积也称为过滤器,即Filter

1 卷积的计算方法
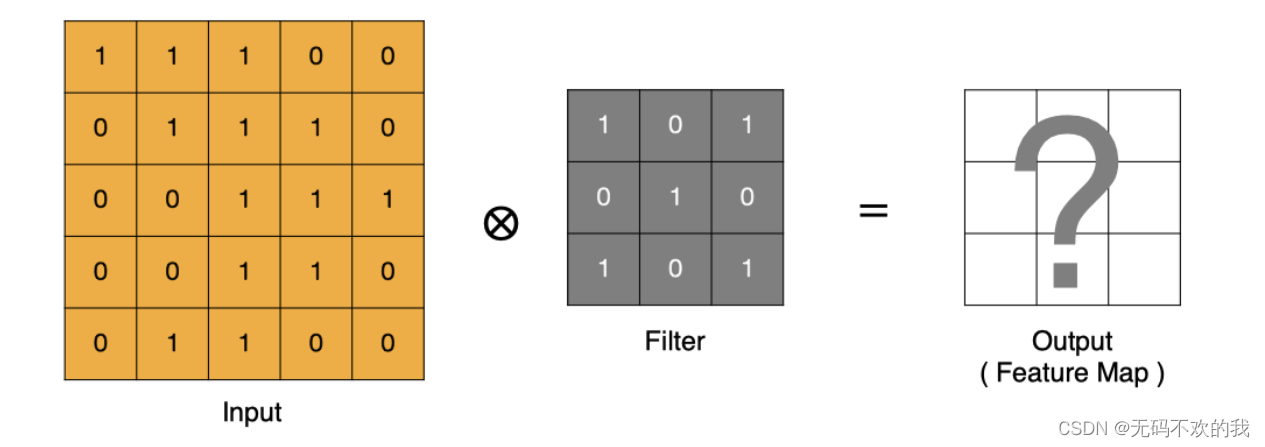
卷积运算本质上就是在滤波器和输入数据的局部区域间做点积
注意:
- 卷积核中的数字的来源跟前文中的权重w相同,刚开始初始化一个值(初始化方法跟权重的初始化方法相同),然后再通过不断的学习和反向传播进行更新。
- 卷积核/过滤器大小,一般会选择为奇数(因为尺寸为奇数的卷积核可以找到中心点),比如有1 * 1, 3 * 3, 5 * 5 ,一般选用尺寸较小的卷积核,比如3 * 3的核使用的最多,因为核越大所包含的参数就越多。
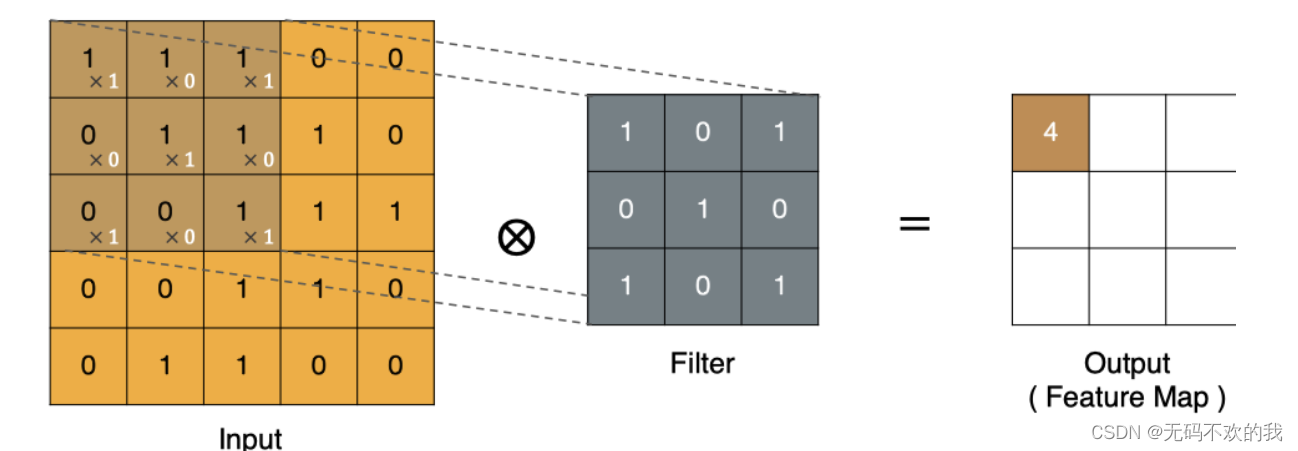
左上角的点计算方法:

同理可以计算其他各点,得到最终的卷积结果,
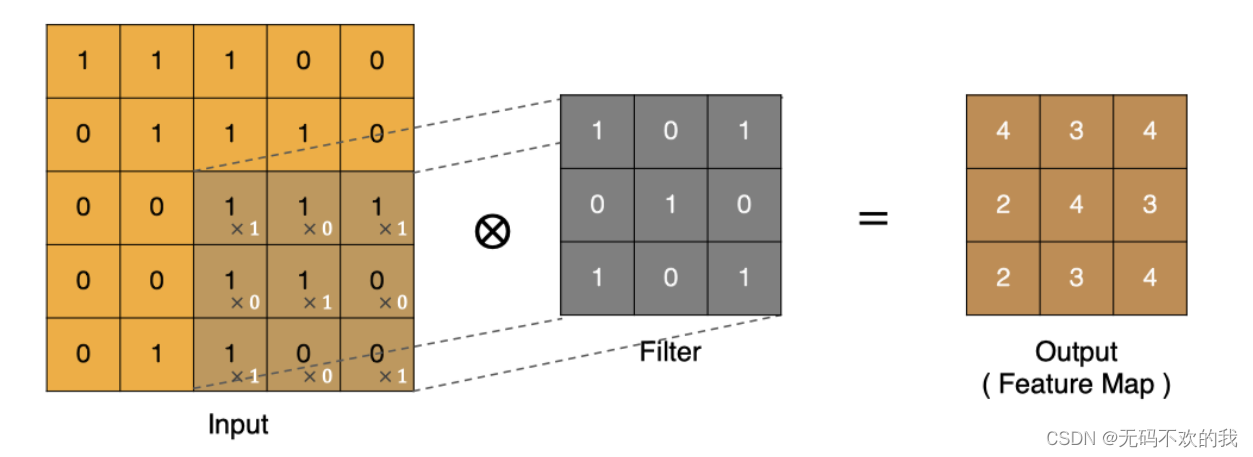
最后一点的计算方法是:

注意:因为每个卷积核都会带一个偏置,这里计算的时候默认为偏置值为0,如果偏置不为0,还需要加上偏置值
2 padding
在上述卷积过程中,特征图比原始图减小了很多,我们可以在原图像的周围进行padding,来保证在卷积过程中特征图大小不变。
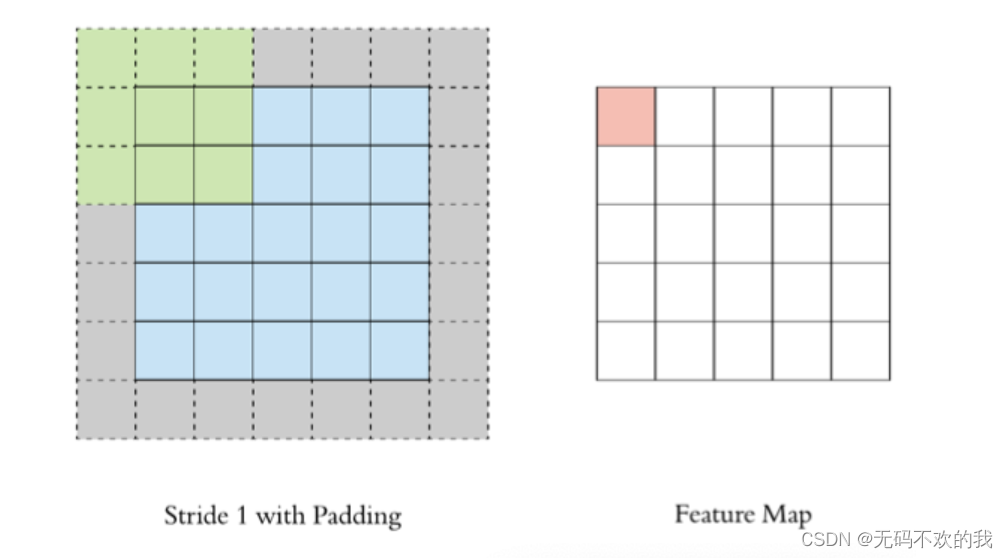
3 stride
按照步长为1来移动卷积核,计算特征图如下所示:

如果我们把stride增大,比如设为2,也是可以提取特征图的,如下图所示:

步长越大,特征图会变得越小
4 多通道卷积
实际中的图像都是多个通道组成的,我们怎么计算卷积呢?
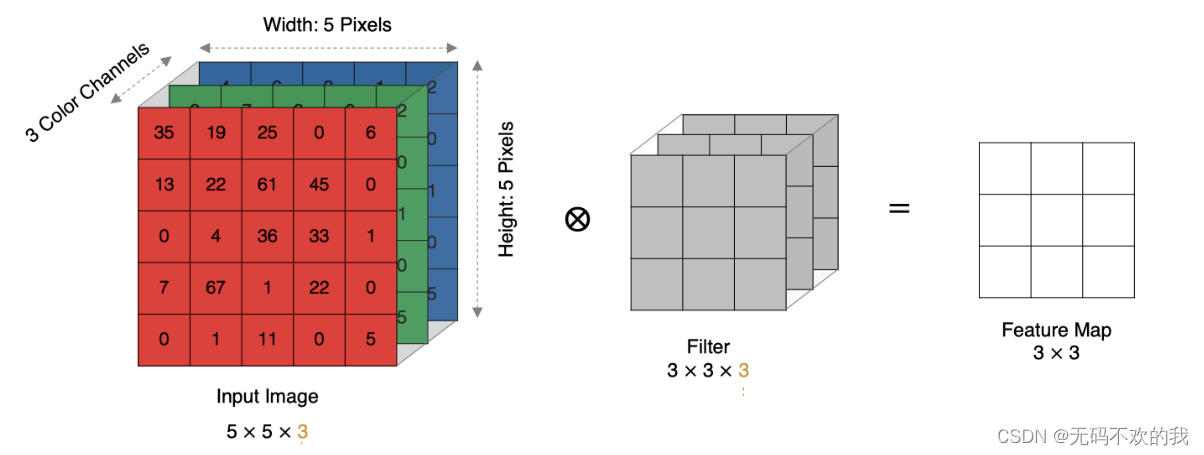
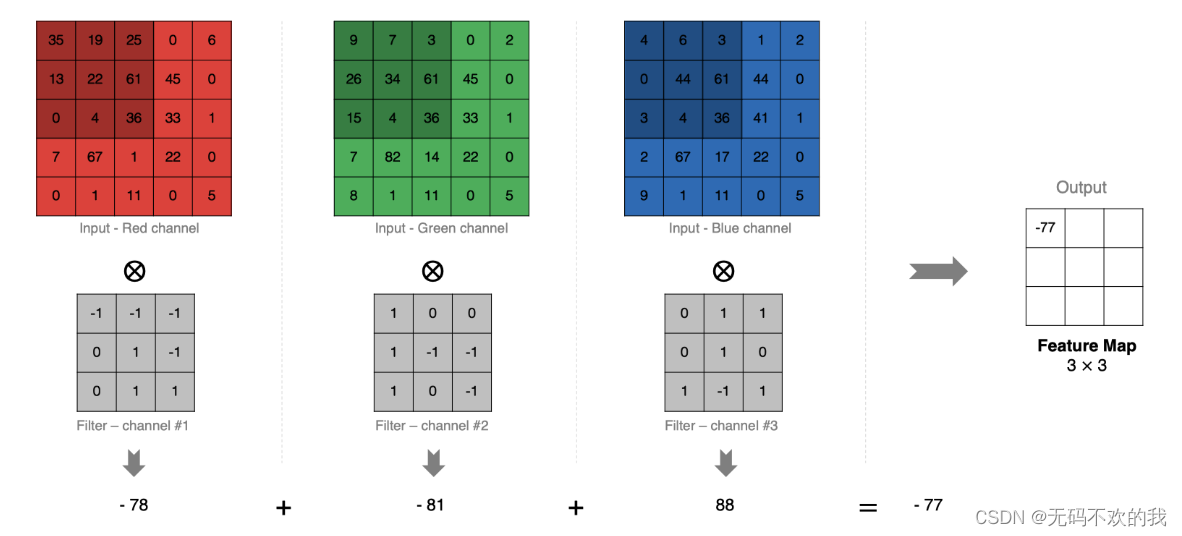
计算方法如下:当输入有多个通道(channel)时(例如图片可以有 RGB 三个通道),卷积核需要拥有相同的通道数(channel),每个卷积核 channel 与输入层的对应 channel 进行卷积,将每个 channel 的卷积结果按位相加得到最终的 特征图(Feature Map)。注意,因为每个卷积核都会带一个偏置,这里计算的时候默认为偏置值为0,如果偏置不为0,还需要加上偏置值
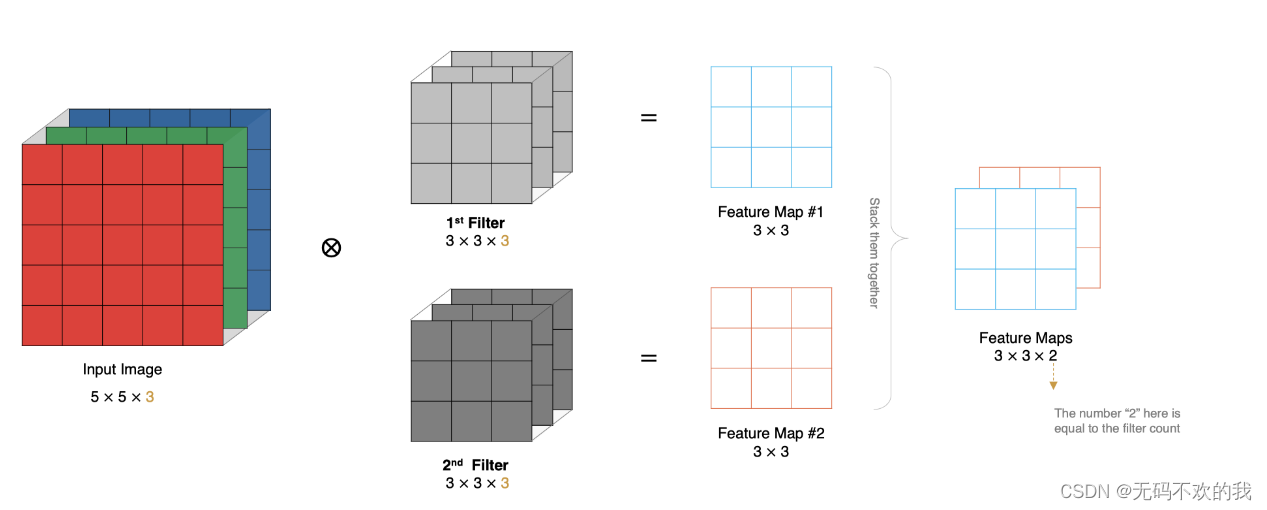
5 多卷积核卷积
如果有多个卷积核( filter)时怎么计算呢?当有多个卷积核时,每个卷积核学习到不同的特征,对应产生包含多个 特征图,也就是说最终产生的特征图有多个通道,(比如为了识别数字“八”,因为它由两个特征:一撇和一捺,那么就用两个卷积核分别来识别这两个特征)
例如下图所示,输入图像有3个通道,同时有2个卷积核。对于每个卷积核,先在输入3个通道分别作卷积,再将3个通道结果加起来得到卷积输出。所以最后的输出特征图 ( Feature Map)有两个 通道(channel)。
所以对于某个卷积层,无论输入图像有多少个通道,输出图像通道数总是等于卷积核数量!
6 特征图大小
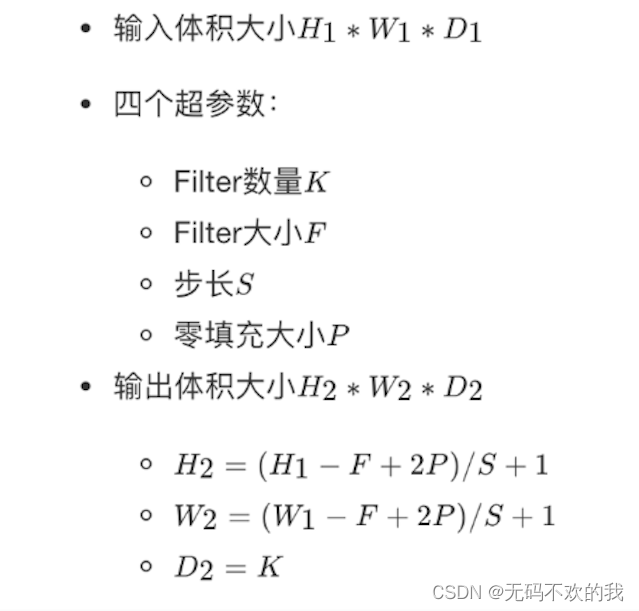
输出特征图的大小与以下参数息息相关:
- size:卷积核/过滤器大小,一般会选择为奇数(因为尺寸为奇数的卷积核可以找到中心点),比如有1 * 1, 3 * 3, 5 * 5 ,一般选用尺寸较小的卷积核,比如3 * 3的核使用的最多,因为核越大所包含的参数就越多。
- padding:零填充的大小 (这里的大小指的是原始图像单侧外围厚度,比如下例中padding大小为1)
- stride:步长
那计算方法如下图所示:
注意:
- 上面的D1是输入特征图的通道数;D2是输出特征图的通道数,它等于卷积核(Filter)的数量
- 上面公式最终的计算结果是向下取整
例如:输入特征图为5x5,卷积核为3x3,外加padding 为1,步长为1,则其输出特征图尺寸为:
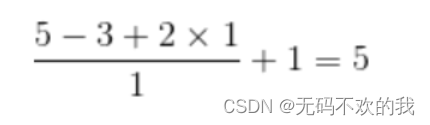
如果想让卷积前后的特征图的尺寸不发生变化,那么可以设置 padding=( F-1 )/2,并且步长stride=1
7 pytorch中对应的API
nn.Conv2d(in_channels,out_channels,kernel_size,stride=1,padding=0,dilation=1,groups=1,bias=True,padding_mode='zeros')
功能:对多个二维信息(图像)进行二维卷积
- in_channels: 输入通道数
- out_channels: 输出通道数,等价于卷积核个数
- kernel_size: 卷积核尺寸
- stride: 步长
- padding: 填充个数,加入padding的主要作用是保持输入输出图像的尺寸不变
- dilation: 空洞卷积大小
- groups: 分组卷积设置,它常用于模型的轻量化
- bias: 偏置
8 3D卷积
上面所讲的内容都是常规的2D卷积,本节着重讲解一下3D卷积。
在讲解3D卷积之前,我们先了解一下3D图像,3D图像比2D图像多了个一个维度,除了宽和高之外还有深度。这里的深度其实就是将相同尺寸的多张图片堆叠在一起,如果堆叠n张图片,那么深度就是n
3D图像通常是由多帧(单/多通道)的frame-like数据(视频帧),所以它的深度其实代表的就是帧数
所以2d图像的输入或输出shape=[B,C,H,W],3d图像的输入或输出shape=[B,C,D,H,W],其中D就是depth(深度),这里的depth就是要堆叠出多少张图片。
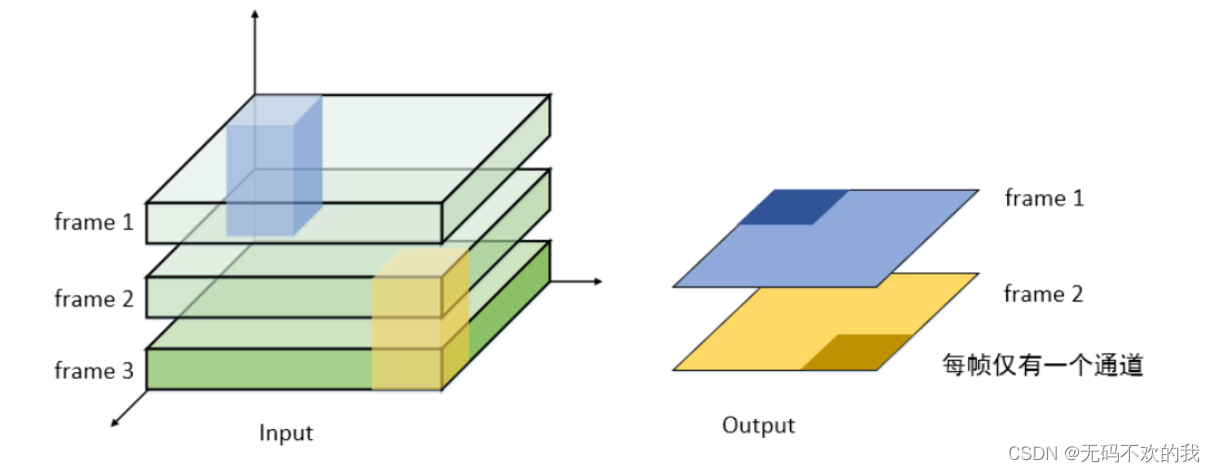
如下图所示,将3张单通道的图片堆叠在一起(D=3),处理这样的数据就需要一个3D卷积核,3D卷积核也有对应的深度,比如下图中的3D卷积核深度是2,也就是说它每次要扫描2张图片
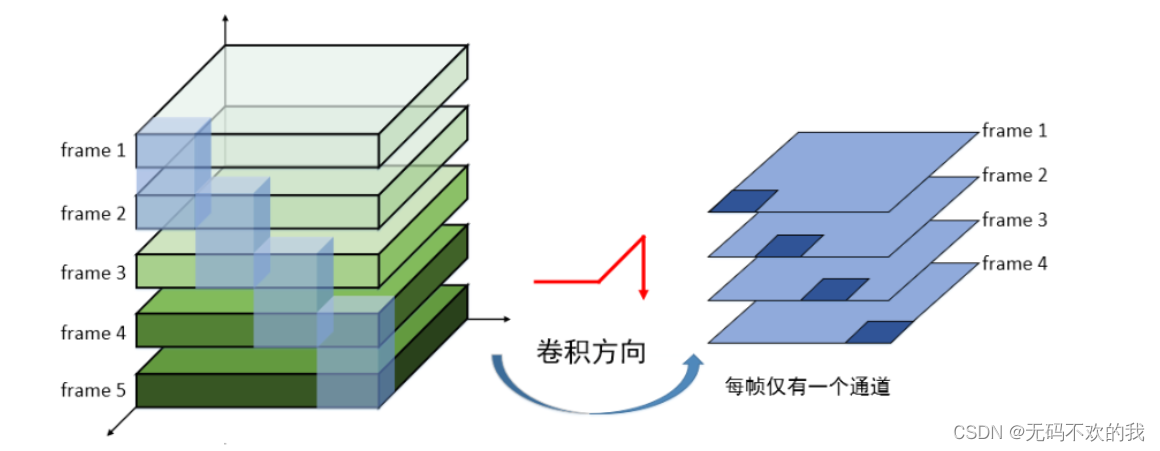
再如下图所示,将5张单通道的图片堆叠在一起(D=5),处理这样的数据就需要一个3D卷积核,3D卷积核也有对应的深度,比如下图中的3D卷积核深度是2,也就是说它每次要扫描2张图片
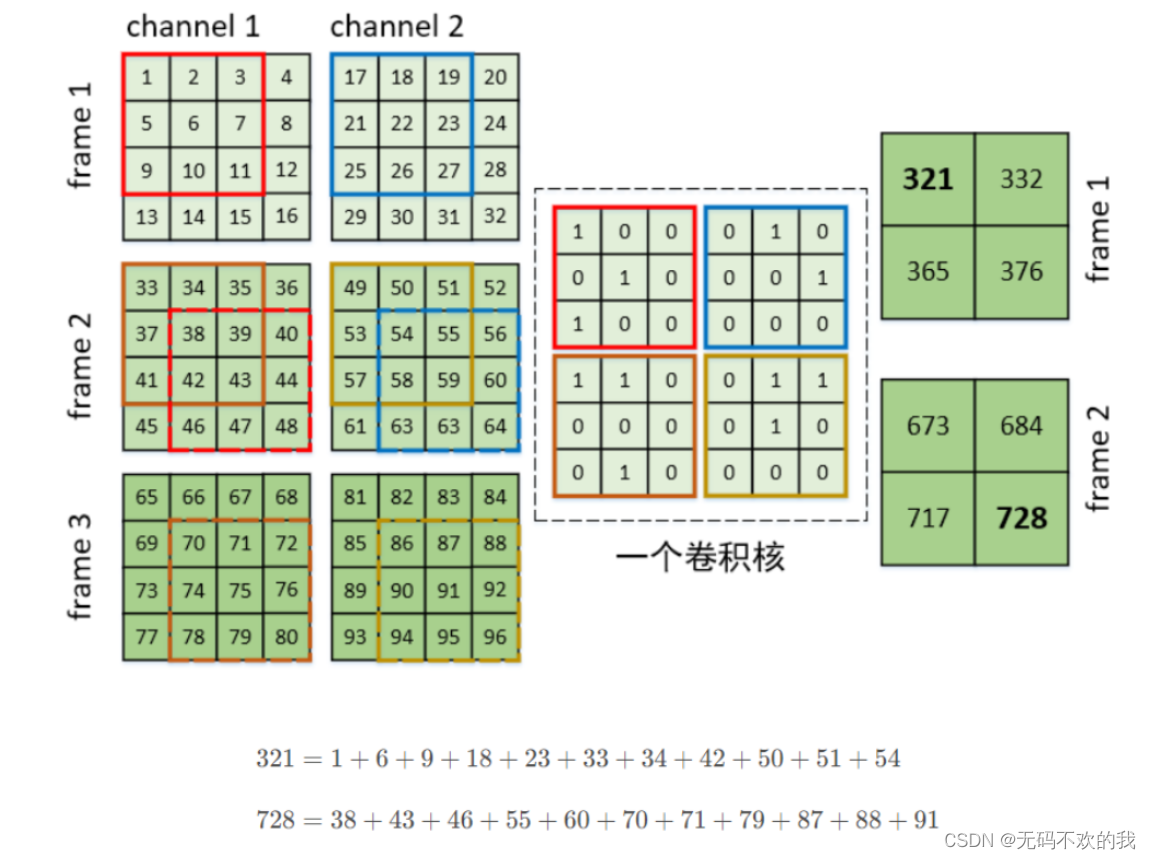
3D卷积计算过程:
3D convolution的使用场景一般是多帧(单/多通道)的frame-like数据(视频帧),且输出也是多帧,依次对连续k帧的整个通道同时执行卷积操作;3D卷积在执行时不仅在各自的通道中共享卷积核,而且在各帧(连续k帧)之间也共享卷积核(2D卷积在执行时是在各自的通道中共享卷积核)
假设现在有一个3帧的画面,且每一帧有2个通道,卷积核的shape=[D,H,W]=[2,3,3],步长为1,padding=0,它的计算过程如下:
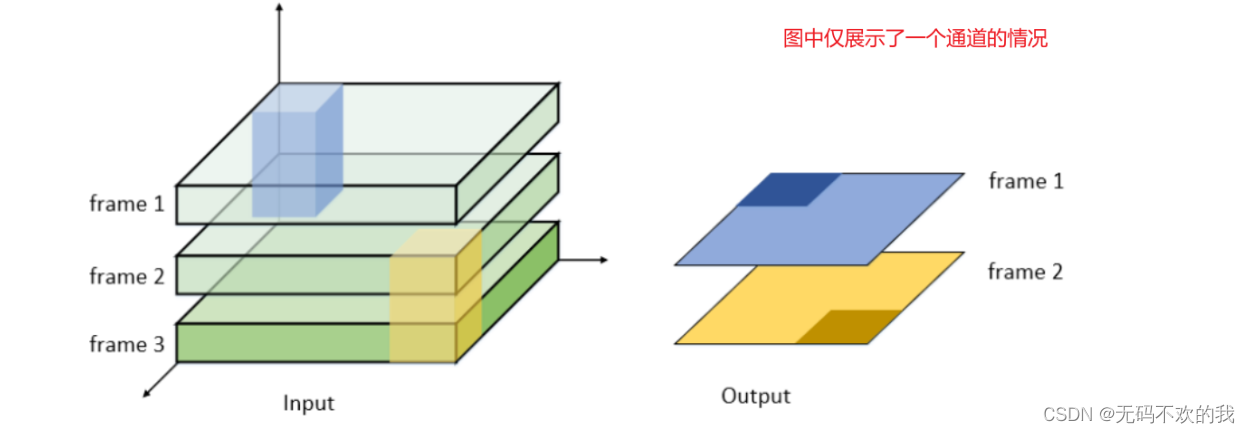
pytorch中对应的API:
torch.nn.Conv3d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros', device=None, dtype=None)
Conv3d和Conv3d的参数含义是完全相同的,如下所示:
- in_channels: 输入通道数
- out_channels: 输出通道数,等价于卷积核个数
- kernel_size: 卷积核尺寸
- stride: 步长
- padding: 填充个数,加入padding的主要作用是保持输入输出图像的尺寸不变
- dilation: 空洞卷积大小
- groups: 分组卷积设置,它常用于模型的轻量化
- bias: 偏置
代码演示:
- 示例1
#3D卷积的用法
import torch
import torch.nn as nn
# 随机输入,它的shapo=[B,C,D,H,W]=[32,3,6,224,224]
net_input = torch.randn(32, 3, 6, 224, 224)
#卷积层输入通道数是3,输出通道数是64
# 3D卷积核的shape=(D,H,W)=(3,3,3),由于D=3,所以卷积核每次会同时处理三张图片。D,H,W三个维度的步长都是1
conv = nn.Conv3d(3, 64, kernel_size=3, stride=1, padding=1)
net_output = conv(net_input)
print(net_output.shape)
#输出结果如下,shape=[B,C,D,H,W]=[32, 64, 5, 112, 112],相当于每一个维度上的卷积核大小都是3,步长都是1,pad都是1
torch.Size([32, 64, 6, 224, 224])
- 示例2
# 3D卷积核的shape=(D,H,W)=(2,3,3),由于D=3,所以卷积核每次会同时处理2张图片。D,H,W三个维度的步长分别是2,3,3
conv = nn.Conv3d(3, 64, (2, 3, 3), stride=(1, 2, 2), padding=(0, 1, 1))
net_output = conv(net_input)
print(net_output.shape)
#输出结果
torch.Size([32, 64, 5, 112, 112])