旗舰级DG4Pros
RIY-DG4Pros是目前睿铂性能指标最高的一款全画幅倾斜摄影相机,其核心光学组件部分由睿铂结合多年来的用户反馈与对倾斜摄影技术的探索成果,完全自主研发设计,技术水平领先于市面同类产品。相机镜头内置双高斯结构和超低色散非球面ED镜片,可补偿像差、提高锐度值、降低色散,并且将光学镜头畸变率严格控制到千分之四以内。
目前,DG4Pros已经被全国各个大型测绘、遥感单位采用,其应用范围包括但不限于地籍测量、智慧城市建设、房地一体、应急测绘、BIM规划等方面。 得益于相机出色的软硬件配置,良好的适配性能, 通过DG4Pros采集数据建立的模型,具备非常优质的模型效果与极高的精度。

DG4Pros参数介绍
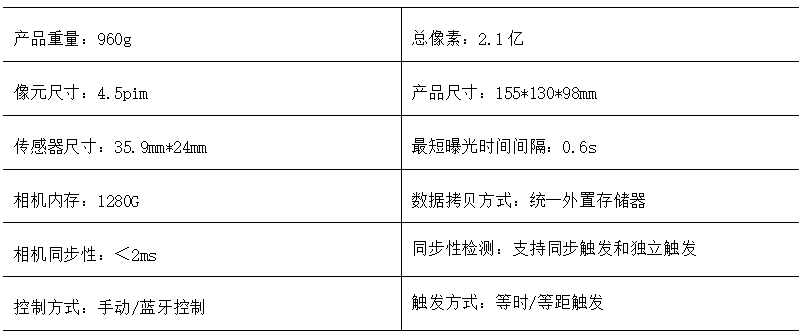
1▪基础参数
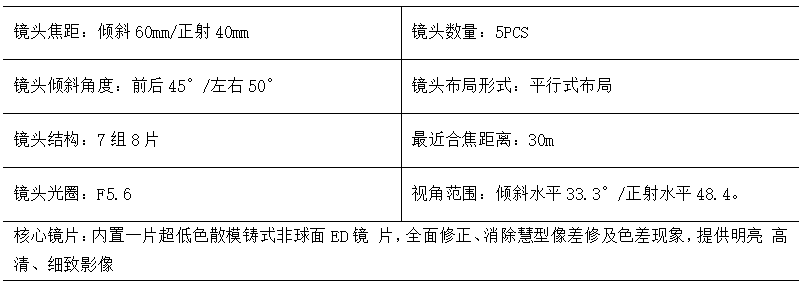
2▪核心光学参数
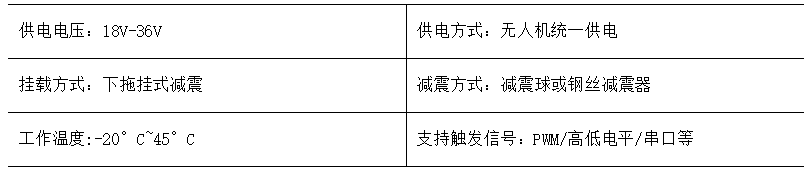
3▪适配参数
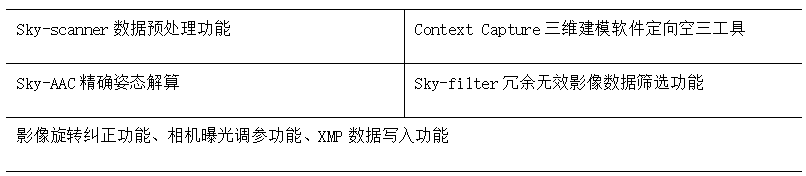
4▪配套功能
核心优势解析
DG4Pros自上市以来,就得到了用户的高度认可,相机的使用单位包括全国各大地信相关事业单位、大型甲级私企等。为什么大家会都选择睿铂DG4Pros?得益于相机以下七大突出性能。
1▪优异的光学性能
光学镜头是航测相机的关键器件,是航空影像质量的决定性因素。 畸变会影响模型精度;球差会导致镜头的分辨率下降;色差会影响空三的匹配精度。
DG4Pros为了控制镜头体积采用了非球面镜片, 并且把光学镜头整体畸变控制到了千分之四以内。每组镜头采用一片超低色散ED镜片,以修正、消除彗差型像差及色差现象,大幅度提高空三特征点匹配的鲁棒性,降低空三分层概率。

2▪合理的镜头焦距比
众所周知,如果航空影像分辨率差异太大,会大幅度增加空三分层的概率,所以,为了保证倾斜影像中心点和正射影像中心点分辨率尽可能一致,倾斜镜头的焦距要大于正射镜头的焦距。
DG4Pros正射光学镜头焦距为40mm,倾斜镜头焦距为60mm,倾斜正射焦距比1:1.5,可使前后倾斜影像中心点影像分辨率略大于 正射影像中心点分辨率;左右倾斜影像中心点影像分辨率略小于正射影像中心点分辨率。即使无人机飞行姿态轻微扰动,相机也能够尽可能保证五个镜头影像分辨率基本一致,提高空三的通过的概率。
3▪镜头平行式布局
目前市面上五镜头倾斜摄影相机均采用了围绕式布局,这种布局方式可以通过更紧凑的布局,减小相机整体体积和重量。
但是这种布局方式会造成影像的旁向实际重叠度低于航向重叠度,导致模型的旁向效果较差。为了解决该问题,DG4Pros创新地采用了平行式布局,这种布局方式能够保证相同的航向、旁向重叠度和旁向视角高度。为了进一步增加旁向视角,减少“屋檐效应”的拉花, DG4Pros将镜头左右倾斜焦距从45°提高50°,实现更好的旁向建模效果。

4高拍照同步性
相机拍照高同步性是实现高精度三维建模的关键性技术之一,在航飞作业过程中,五个镜头影像拍摄内容不一致,随着时间积累就会导致倾斜相机的每个镜头 不能在同一时间准确响应快门信号,导致镜头拍照不同步。
DG4Pros采用独有的相机同步性控制技术,能够动态反馈和补偿每一个相机,实现五个镜头高精度同步曝光。
5▪外置一体式存储模块
高像素全画幅相机采集的数据量相对更大,如果采用传统数据拷贝方式,会严重影响外业人员的作业效率。DG4Pros是目前市面唯一一款配置可插拔一体储存模块的倾斜相机,标配两块内存容量 640G存储器,外业人员能够在5秒内完成更换,可大幅度提高外业效率。存储模块数据拷贝速度可达到300MB/S,内业同事能够快速拷贝数据,提高整体作业效率。

6▪参数调节功能
DG4Pros开放曝光参数调节功能,用户可根据测区光线的具体情况进行参数调节,对于光线变化较大、太暗或者高亮的建筑场景实现正确曝光有显著帮助。还可根据光线的强度调整影像对比度,提高图像宽容度,减小建筑体迎光面过曝和背光面欠曝的现象。
7▪无人机适配性
DG4Pros即使采用平行式布局,相机体积也非常小,外形仅155x130x98mm,重量轻至960g。相机支持PWM、高低电平、串口信号触发方式,兼容市面大部分主流无人机平台。
相机既可以挂載于多旋翼无人机做高精度倾斜影像数据采集,也可以挂載于固定翼无人机做大面积倾斜影像数据采集,一套设备即可满足多种不同项目需求,实现一机多用,提升设备经济效益。
配套软件
睿铂一直关注客户需求,用心解决客户面临的困难。基于客户反馈,睿铂根据倾斜摄影作业特点及数据处理流程中存在的问题,自主研发设计了以下4款软件,可提升用户数据处理效率,减少数据处理流程的问题。用心打磨产品,为客户创造价值,一直是睿铂不变的宗旨。
1▪Sky-scanner数据预处理软件
Sky-scanner是一款成都睿铂自主研发的数据预处理 软件,其作用是对无人机飞行后的数据进行预处理。 通过CONNECT UNIT单元,可自动计算并储存每个 相机姿态信息,并且直接生成blocks文件。不仅能提 高空三成功率,同时也能减少空三次数,提升刺点 50%以上效率,综合提高内业70%以上的效率。
2▪Sky-filter相片筛选软件
倾斜摄影作业时,为了采集到目标区域边缘建筑物的 纹理信息,需要进行航线外扩。但外扩航线数据采集 会产生大量无效航片,导致总航片数量上升,严重降 低数据处理效率,加大内业处理难度和空三分层概 率。Sky-filter软件可以有效剔除冗余的外扩航片,使 总航片数量下降约30%,数据处理效率提高约50%。
3▪Sky-AAC精确姿态解算软件
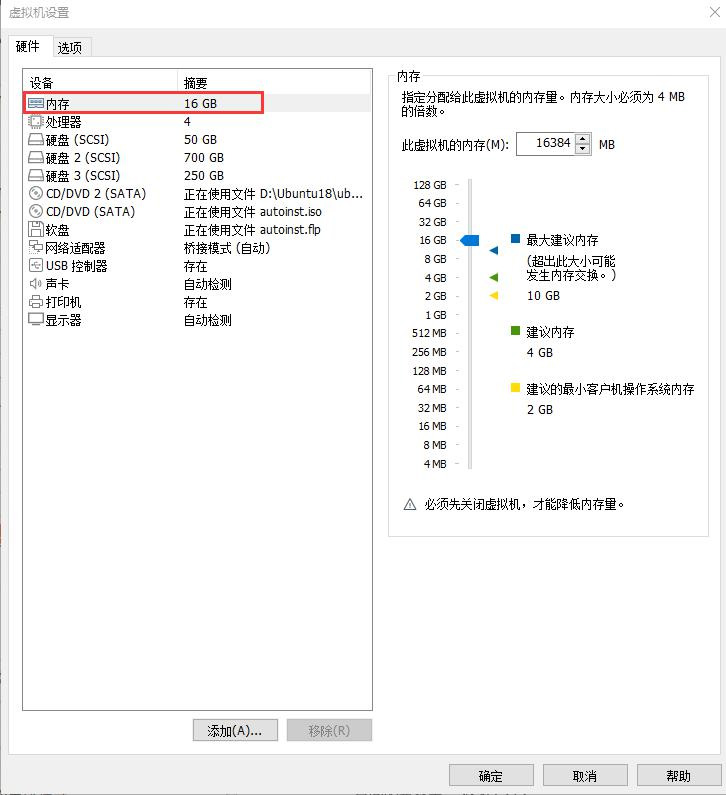
Sky-AAC高精度姿态合成软件可以解决部分因测区光影差异和地物特征点较少,导致的空三分层问题。 通过Sky-AAC软件解算合成后的数据,可以在128GB 内存的电脑中完成6-7万张影像的空三计算!在增加内业工作效率的同时,降低对计算机工作集群配置的要求。
4▪Sky-target定向空三软件
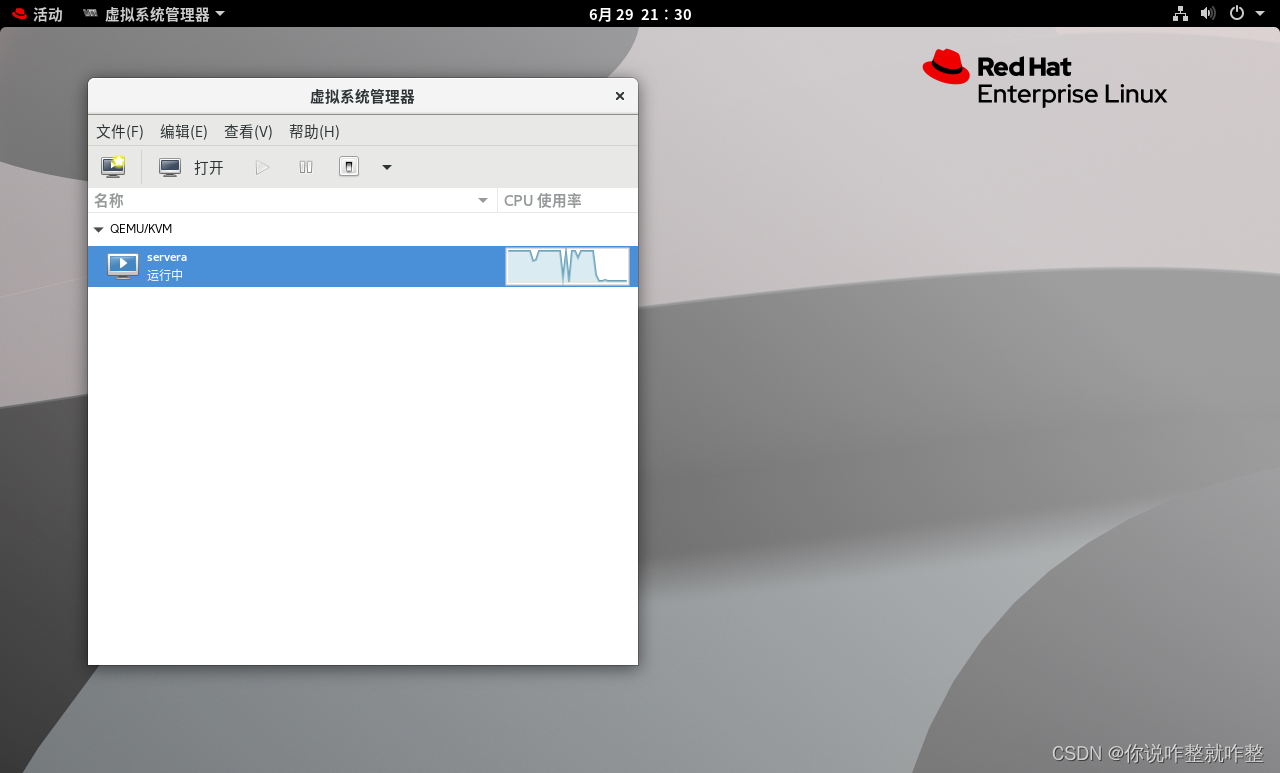
倾斜摄影采集的数据量非常大,在后期数据处理时, 服务器中不同电脑的性能差异会对处理过程造成影 响,所以对服务器的综合性能要求非常高。
Sky-target 定向空三软件,不仅可以跨过低内存服务器,还可以指定性能更强的电脑做后续空三,加快空三速度。它使得8G内存的电脑也可以进行集群,不用再担心51% 的空三计算时,因系统随机分配到性能差的电脑,导致的空三失败问题。
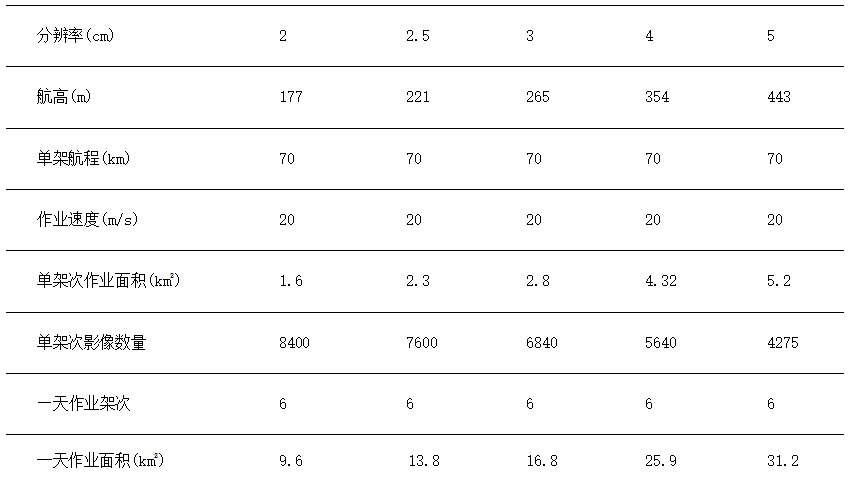
作业效率表
1▪多旋翼无人机+DG4Pros

2▪固定翼无人机+DG4Pros
项目案例
1▪自然资源部经济管理科学硏究所“多测合一”项目

“多测合一”项目的成果有着广泛的运用度,本次项目 依托于汕头市区域规划建设的需求,由自然资源部经 济管理科学研究所与汕头市测绘研究院联合承担其 基于倾斜摄影测量模型生产及相关地形图的建设与 应用任务。
本项目实施难点在于项目工期很紧、DG4Pros强大的 软硬件配置为项目准时完成提供了有力保障!
2▪浙江省测绘科学技术研究院城市高楼区地籍精度建模

倾斜摄影经过几年的发展,在测绘行业中已经得到了广泛的应用。但是由于设备技术条件的制约,倾斜摄影对于城市中落差较大场景的地籍测量还是应对乏力。这主要是因为小型倾斜相机的镜头的焦距、像幅、畸变、相机同步性达不到要求。要做到平面精度在5cm以内,那么照片的分辨率必须要保证在2cm以内,同时还要保证模型的质量效果要非常好才能够实现。
本项目实施难点在于测区建筑高差大且模型精度要求很高,DG4Pros拥有市面上最长焦距的镜头,使模型最终精度满足国家1:500地籍精度要求。