同步原理:
在通信系统中,同步是指发送端和接收端在时间上保持一致,使得接收端能够正确地解析和还原发送端发送的信号。同步的原理可以根据具体的通信系统和协议来区分,下面是几种常见的同步原理:
1. 时钟同步:通信系统中的时钟同步是指发送端和接收端的时钟保持同步。发送端在发送数据时,按照固定的时钟周期发送每个比特或符号。接收端通过接收到的信号中的时钟信息来同步自己的时钟,并根据时钟周期来解析和还原数据。时钟同步可以通过使用专门的时钟信号或者采用编码技术来实现。
2. 帧同步:在一些通信系统中,数据以帧的形式传输。帧同步是指接收端能够识别和辨别出每个帧的起始和结束,并保持与发送端的帧结构和时序一致。帧同步通常使用帧头的特定模式或标志来实现,接收端通过检测帧头的模式或标志来定位帧的起始,并识别帧的长度和数据内容。
3. 位同步:在某些通信系统中,数据以位的形式传输,需要保持每个比特的同步。位同步是指接收端能够准确地解析每个比特的边界和数值。比特同步通常使用定时电路或接收端自适应的时钟恢复算法来实现。
4. 符号同步:在一些数字通信系统中,数据以符号的形式传输,需要保持每个符号的同步。符号同步是指接收端能够正确解析每个符号的边界和数值。符号同步通常使用匹配滤波器、时钟恢复算法或等化器等技术来实现。
总之,通信系统中的同步原理是为了确保发送端和接收端的时序一致,从而正确解析和还原传输的数据。不同的通信系统和协议可能采用不同的同步方法和技术,具体的同步原理取决于通信系统的特点和要求。
载波同步:
同步是通信系统中必不可少的部分,是关系到通信系统能否正常工作的重要环节。
在相干解调器中,需要用载波同步器来提取本地相干载波,用于已调信号的解调,相干载波应与调制载波同频同相。
载波同步分为直接法和插入导频法两类方法。
直接法:直接从接收信号中提取载波信号。
插入导频法:在已调信号中加入额外的载频分量(导频信号)。
AM信号中含有载波离散谱成份,可以用一个窄带滤波器直接提取。
DSB信号中无载波分量,但可以通过非线性变换后直接提取,也可以用插入导频的方法实现载波同步。
SSB信号中既没有载波又不能用直接法提取,只能用插入导频法提取载波。
VSB信号中虽含有载波,但不易提取,可以用插入导频法。
直接法提取载波信号举例。
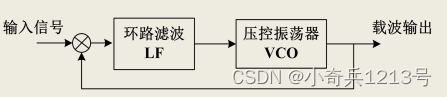
AM信号,可以用窄带滤波器直接获取同步载波。锁相环是一种中心频率能自
动跟踪输入信号载波变化的带通滤波器。
DSB信号中是没有载波的离散成份的,现对其进行非线性变换——平方变换,得:

载波同步器性能指标:
1)同步建立时间
从开始接收到信号(或从系统失步状态)至提取出稳定的载频所需要的时间称为同步建立时间。 同步建立时间越短越好。
2)同步保持时间
从开始失去输入信号到失去载频同步的时间称为同步保持时间。同步保持时间越长越好。同步保持时间长,则在输入信号短暂丢失时,保持连续提供本地载频,不需要重新建立同步。同步建立和同步保持对环路自然谐振频率的要求是矛盾的,在设计同步系统时需要权衡、折衷处理。
3)相位误差
相位误差:由电路常数引起,或由噪声引起。
以DSB为例
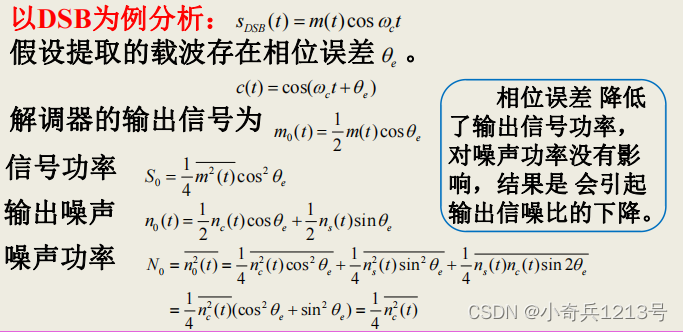
相位误差降低了输出信号功率,对噪声功率没有影响,结果时会引起输出信噪比的下降。
位同步:
位同步目的:确定接收码元起始时刻,以保证正确检测和判决所接收的码元。
码元同步方法分类:
外同步法----它是一种利用辅助信息同步的方法,即需要在传输的信号中另外加入包含码元定时信息的导频信号。
自同步法----它不需要辅助同步信息,而是直接从接收的信号序列中提取出码元定时信息。显然,这种方法要求接收信号中含有码元定时信息。
外同步法:
常用的外同步法:在发送信号中插入频率为码元速率fb(或RB),或者RB整数倍的同步信号。在接收端利用一个窄带滤波器将其分离出来。
优缺点:优点是设备较简单,缺点是需要占用一定的频带宽带和发送功率。
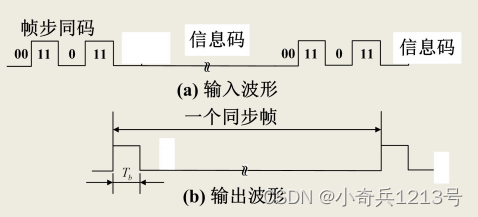
插入码元同步信号的方法:
时域:连续插入;增加“同步头”
频域:在信息码元频谱之外占用一段频谱用于传输同步信息。
外同步法目前采用不多。
自同步法:
开环位同步法:开环同步也称为非线性变换同步。它是将基带系统的接收码元先通过某种非线性变换,再送入一个窄带滤波电路,从而滤出码元速率的离散分量。
闭环同步中:则通过比较本地时钟周期和输入信号码元周期,将本地时钟锁定在输入信号上。闭环法更为准确,但是也更为复杂。
开环位同步法的两种方案,延迟相乘法、微分整流法。
延迟相乘法:

延迟相乘后码元波形的后一半永远是正值。前一半则当输入状态有改变时为负值。
因此,变换后的码元序列的频谱中就产生了 RB 的分量。
微型整流法:
微分电路-----用于检测矩形码元脉冲的边沿,输出是正负窄脉冲。
整流电路-----经过微分得到正脉冲序列,此序列的频谱中就包含有码元速率的分量。
窄带滤波-----滤出RB的离散分量。

闭环同步法:
基本原理---将接收信号和本地产生的码元定时信号相比较,使本地产生的定时信号和接收码元波形的转变点保持同步。
超前/滞后门同步器:

工作原理:
同步状态下,两个门的积分期间均在码元持续时间内,两个积分器的积分结果相等,相减后得到的误差信号为零。同步器就稳定在此状态。
若压控震荡器的输出超前于输入信号,滞后门仍然在其全部积分期间内积分,而超前门的前Δ时间落在前一码元内。
码元波形跳变前后的2Δ时间内信号的积分值为零。因此,压控振荡器得到一个负的控制电压,使压控振荡器的振荡频率减小。

帧同步:
帧结构中包含净负荷区、段开销和管理单元指针三部分。
净负荷区用于存放真正用于信息业务的比特和少量的用于通道维护管理的开销字节。
段开销主要用于网络的运行、管理、维护及指配,具体包括:1)同步,包括帧定位和同步状态; 2)通信,包括音频和数据通信;3)性能监视,包括误码特性;4)国际与地区使用分区等。
管理单元指针用来指示净负荷区内的信息首字节在STM-N帧内的准确位置,以便接收时能正确分离净负荷。
帧同步码的插入方式-----集中插入法和分散插入法
集中插入法:A律PCM系统和大多数TDM系统

分散插入法:在u律基群和一些简单的DM系统。

帧同步码要求具有特殊的自相关性质R(j)。
自相关函数(局部自相关函数)

n是码组长度,j=0,1,2...,n-1。
性质:当j=0时,R(j)=n;当j不等于0时,R(j)较小。R(j)是偶函数。

以巴克码为例:(巴克码在j=0尖锐,其他j为0或正负1)

A律PCM基群中采用的帧同步码为“0011011” 。
局部自相关函数是偶函数,R(+j)=R(-j)。
PCM基群帧同步码的局部自相关曲线。

PCM二、三次群的帧同步码为“1111010000” ,其局部自相关曲线:

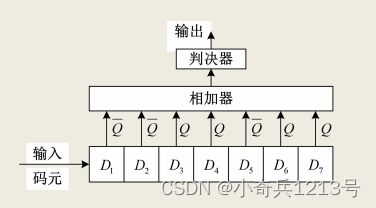
帧同步码识别器由移位寄存器、相加器和判决器组成。以基群帧同步码“0011011”为例。
当帧同步码“0011011”从左至右全部移入寄存器,相加器输入7个“1” ,只要判决器判决门限小于7,比如设5,则识别出帧同步码,输出一个正脉冲。
假同步:若信息序列中正好有连续位与帧同步码相同,则识别器也会输出正脉冲。
漏同步:当同步码中有错码时,可能不被识别。判决门限高有利于防止假同步,但不利于防止漏同步,需要综合考虑去确定判决门限。