三段方向电流保护的方向元件,可以由软压板选择正方向、反方向动作方式。这里仅以正方向为例来说明方向元件原理。
为了保证在各种相间短路故障时,方向元件能可靠而灵敏动作,微机保护的方向元件的“接线方式”(指软件的接线方式)仍然采用90°接线方式。例如A相方向元件(称DA元件)电流量取,电压量取,电流量与电压量的相位差为。为了使方向元件具有最大灵敏度,类似模拟电路型方向保护,引入转移矢量=e,角为方向元件内角。并把×e称为矢量,称为矢量,则绝对值比较方向元件的正方向动作方程式以下式表示

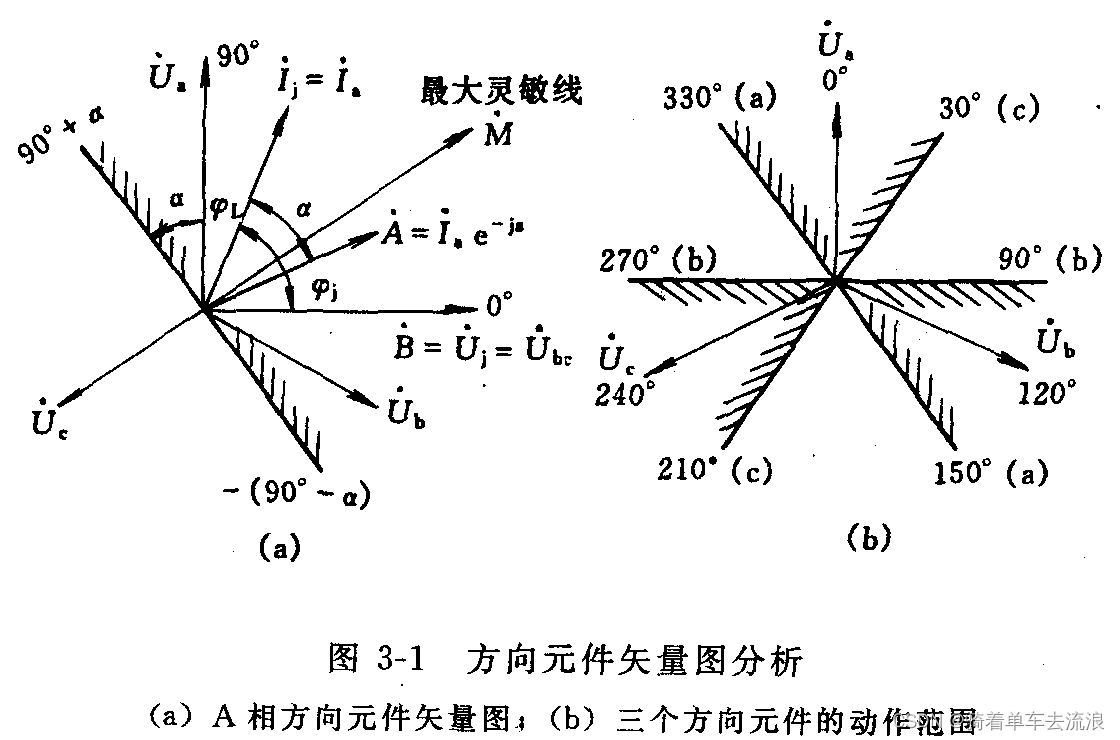
当落在最大灵敏线方向时,矢量落在方向附近,取最大值,取最小值,方向元件处于最灵敏状态。矢量图如图3-1(a)所示。
由矢量图分析可见,若以为基准矢量,如要式(3-1)表示的保护正方向元件临界动作,则和矢量相位差角—。应为土90,当满足下式时保护动作
即落在图中斜影区域内时,方向元件动作。
如果方向元件内角a取30,而35kV线路阻抗角=60,显然上述方向元件在=90一==30时,和矢量取同方向,保护具有最大灵敏度。由于微机保护可利用软件十分方便地完成移相和相位比较,因此在微机保护中采用相位比较式方向元件要比绝对值比较方式简单得多。在微机保护中相位比较式方向元件,就是利用采样计算结果,比较方向元件电流量和电压量的相让角,检查其相位差角是否在正方向的取值范围内。
根据相位比较与绝对值比较的相互关系,可以把上述绝对值比较的动作方程式改换为相让比较的动作方程式。因为比较绝对值大小的两个矢量是+和—,则比较相位的矢量就是和,于是相位比较方向元件的动作方程式为

在微机保护中为了调试的方便,通常选用某相电压为基准矢量并约定按顺时针旋转为角度增加方向。例如选A相电压为基准矢量,方向为0,则图3.1(a)的斜影区范围可表示为
![]()
这就是A相方向元件(=;=)动作范围;B相方向元件(I;一人;Uj=Uc。)的动作范围在90”~270”;C相方向元件(I=人;Uj=U。。)的动作范围在210~30,以上动作范围如图3-1(b)所示,微机保护调试时均可在液晶显示屏上显示动作范围的角度数值。
实际上,用数字运算逻辑判断实现的方向元件在动作区内都一样灵敏,因为方向元件在动作区内的动作几乎不消耗输入回路的功率。此外,在微机保护中实现一些特殊功能也显得十分方便。例如,在方向元件判断正方向后,置DA标志位为“ 1”,而在方向状态记忆后,可用软件方式控制其有效时间,例如3s后置DA标志位为0,其记忆作用就“消失”了。
这样,对反方向的故障(如故障未能切除),装置就可能动作。如此安排正好可以使保护有反方向的后备保护功能。