Python如何获取激光雷达数据
激光雷达数据在机器学习和自动驾驶领域中扮演着重要的角色。Python作为一种功能强大而又易于学习的编程语言,在获取激光雷达数据方面也表现出极高的效率和灵活性。下面我们将介绍如何使用Python获取激光雷达数据。
什么是激光雷达数据?
激光雷达(LIDAR)是一种测距仪器,通过使用激光束来测量距离和地形高度。在自动驾驶系统中,激光雷达可以使用其扫描仪来获取周围环境的三维图像,以帮助汽车决定如何行驶。激光雷达数据通常是以点云形式呈现的,其中每个点代表着扫描仪扫描到的一个物体或表面。
如何获取激光雷达数据?
Python可以使用多种方法来获取激光雷达数据,以下是其中的两种常见方法:
1. 使用LidarReader模块
LidarReader是一个Python模块,可以用来读取和处理激光雷达数据。它支持多种激光雷达数据格式,并可以将数据转换为点云数据。以下是一个使用LidarReader模块的示例代码:
from LidarReader import LidarReader
lidar = LidarReader('data.lidar') # 读取数据文件
points = lidar.read_points() # 将数据转换成点云形式
# 处理点云数据
for point in points:
print(point)
2. 使用ROS工具
ROS(Robotic Operating System)是一个开源的机器人软件框架,可以使用其提供的激光雷达数据包(LaserScan)来获取激光雷达数据。以下是一个使用ROS工具的示例代码:
import rospy
from sensor_msgs.msg import LaserScan
def callback(data):
# 处理激光雷达数据
for i in range(len(data.ranges)):
print(data.ranges[i])
rospy.init_node('lidar_data') # 初始化节点
rospy.Subscriber('/scan', LaserScan, callback) # 订阅激光雷达数据
rospy.spin() # 运行ROS节点
使用ROS工具需要先安装ROS并了解ROS的基本概念和用法,但相对于LidarReader模块,它提供了更多的灵活性和扩展性。
结论
Python提供了丰富的工具和模块来获取激光雷达数据,开发人员可以根据自己的需求和技能水平来决定使用哪种方法。无论是使用LidarReader模块还是ROS工具,Python都能够快速且高效地获取和处理激光雷达数据。
最后的最后
本文由chatgpt生成,文章没有在chatgpt生成的基础上进行任何的修改。以上只是chatgpt能力的冰山一角。作为通用的Aigc大模型,只是展现它原本的实力。
对于颠覆工作方式的ChatGPT,应该选择拥抱而不是抗拒,未来属于“会用”AI的人。
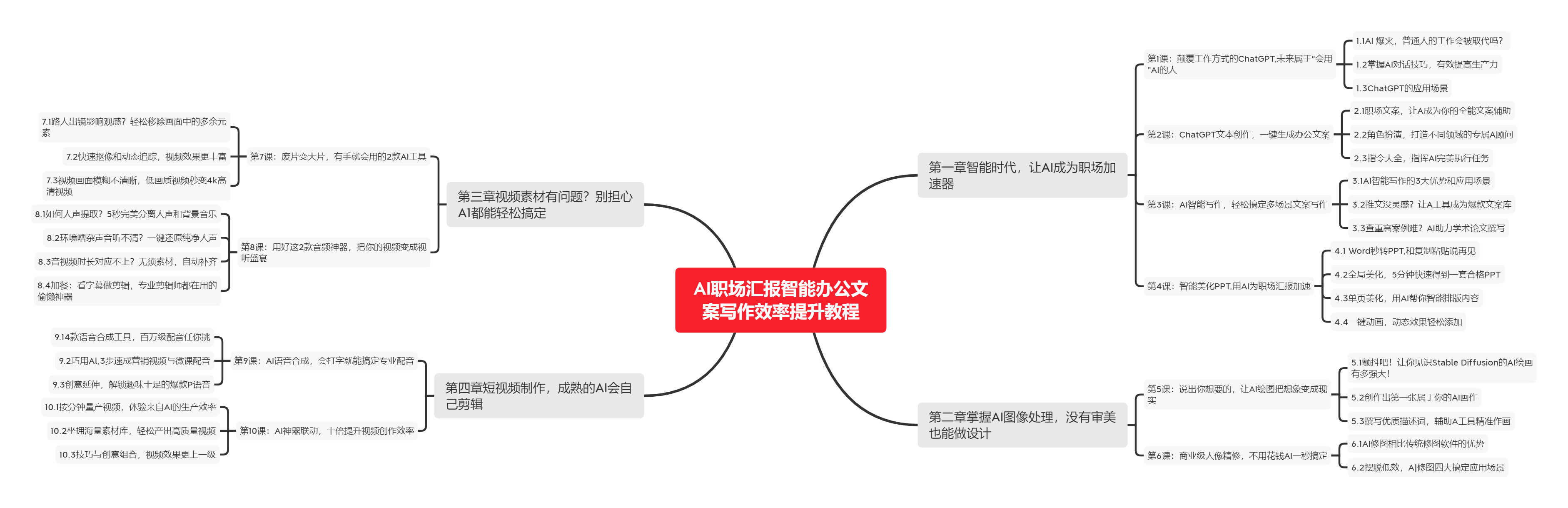
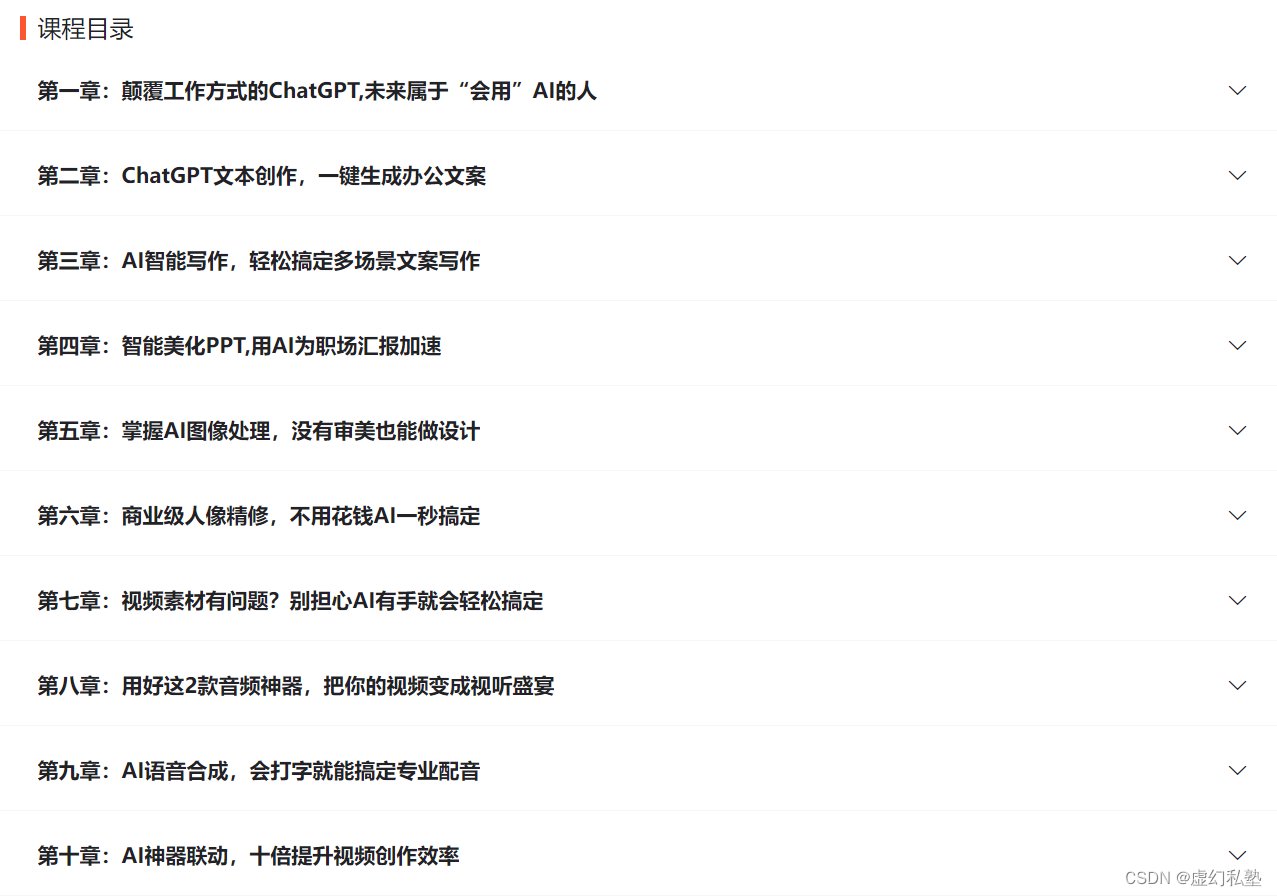
🧡AI职场汇报智能办公文案写作效率提升教程 🧡 专注于AI+职场+办公方向。
下图是课程的整体大纲
下图是AI职场汇报智能办公文案写作效率提升教程中用到的ai工具

🚀 优质教程分享 🚀
- 🎄可以学习更多的关于人工只能/Python的相关内容哦!直接点击下面颜色字体就可以跳转啦!
| 学习路线指引(点击解锁) | 知识定位 | 人群定位 |
|---|---|---|
| 🧡 AI职场汇报智能办公文案写作效率提升教程 🧡 | 进阶级 | 本课程是AI+职场+办公的完美结合,通过ChatGPT文本创作,一键生成办公文案,结合AI智能写作,轻松搞定多场景文案写作。智能美化PPT,用AI为职场汇报加速。AI神器联动,十倍提升视频创作效率 |
| 💛Python量化交易实战 💛 | 入门级 | 手把手带你打造一个易扩展、更安全、效率更高的量化交易系统 |
| 🧡 Python实战微信订餐小程序 🧡 | 进阶级 | 本课程是python flask+微信小程序的完美结合,从项目搭建到腾讯云部署上线,打造一个全栈订餐系统。 |
![[Selenium] 通过Java+Selenium查询某个博主的Top100文章质量分](https://img-blog.csdnimg.cn/cf61ca69b9c6496a9e2e1c9f53b5ca42.png)