第七章 图
第一节 图的定义
一、逻辑结构
1、逻辑结构
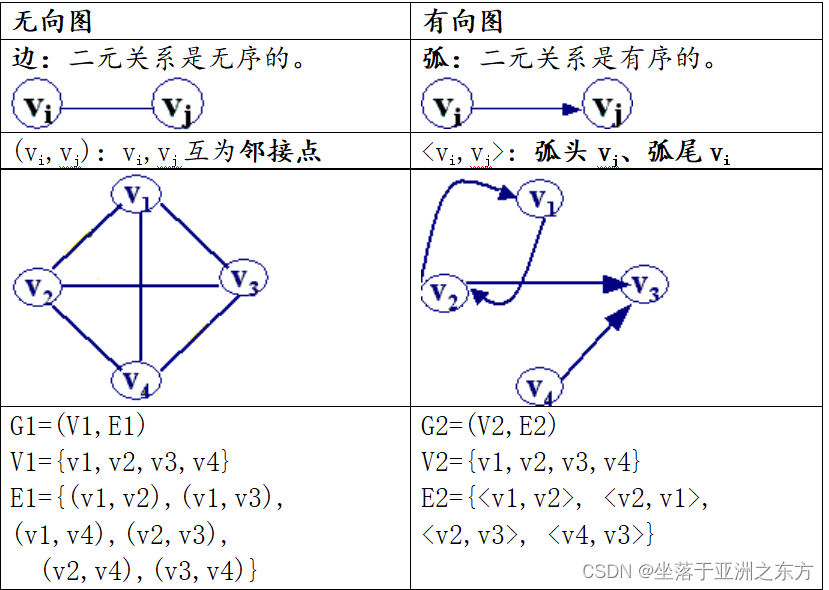
①定义:G=(V,E)。V是顶点集,E是顶点间二元关系的集合。
(内涵越小,外延越大)
②与树的区别:
①树有特殊的根结点;
②树的结点和关系能分成互不相交的若干子集。
③图的分类:
二、基本操作
①对顶点的操作:
InsertVex、DeleteVex、GetVex、SetVex
②对弧/边的操作:
InsertArc、DeleteArc、GetArc、SetArc
③对整体的操作(遍历):
深度遍历DFSTraverse、广度遍历BFSTraverse
三、常见应用
①信息的组织:
家庭照片管理(与个人照片管理的差别)
②运输问题:
从南京到泰州,最近的路线?换车最少的路线?
电子邮件的路由选择?
③网络的规划:
小区设店的位置选择?
区域规划、城市规划
计算机网络的规划
④进度组织:
工程进度管理
并行计算问题
四、概念术语
思路:考虑图的复杂应用,提供简化问题的思路。
1、图的分类
着眼点:存储结构的选择。
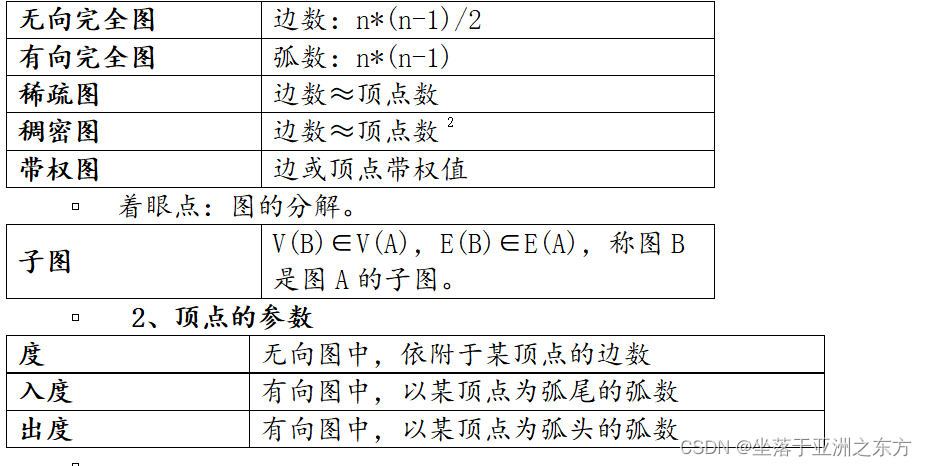
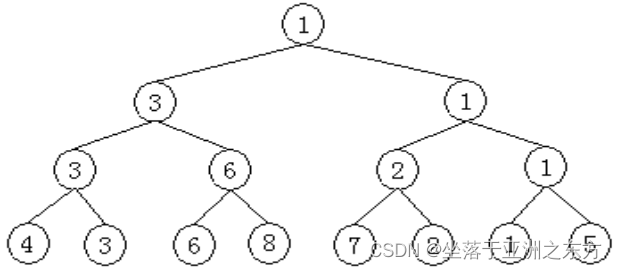
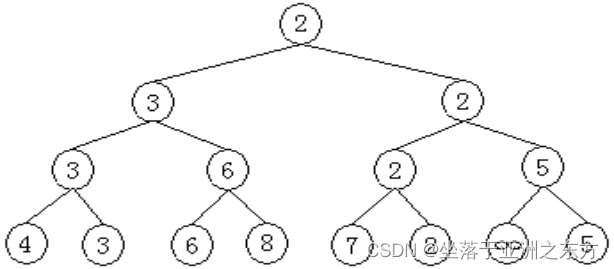
度的应用:以下哪个图能够一笔画完成?为什么?
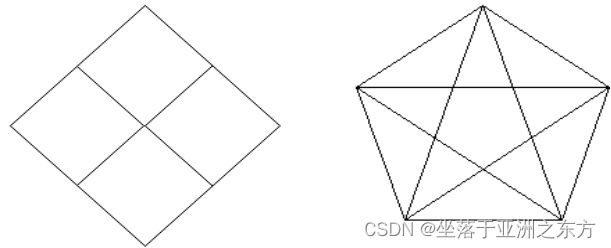
一笔画问题的本质:图结构中的边遍历问题。
应用领域:车间/厂房布置、行走路线的安排…
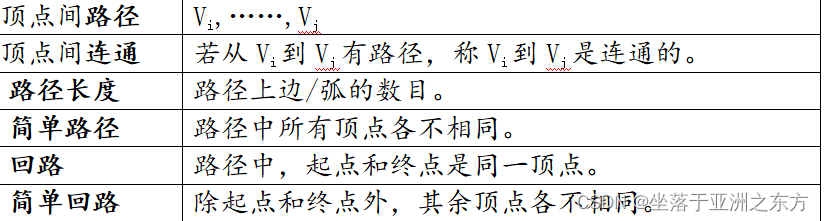
3、有关路径
着眼点:顶点间的联系。
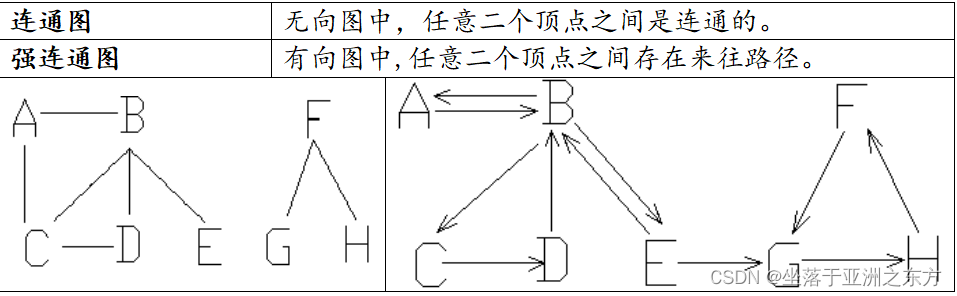
4、有关连通
着眼点:将不连通图简化为连通图。
第二节 图的存储结构
存储结构应该包含:
①顶点的信息;
②边/弧的信息;
③权的信息。
一、数组表示法
1、存储结构
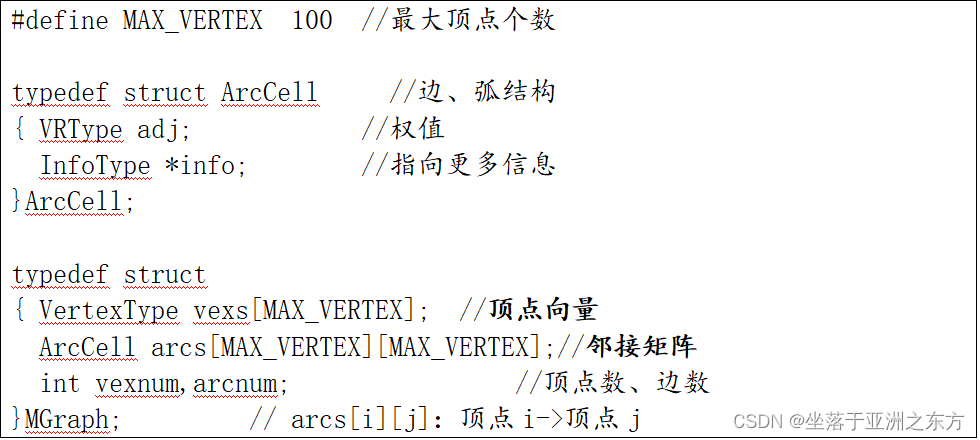
空间复杂度:O(n*n)。
优缺点:
操作方便,适合稠密图。
无向图的arcs[][]为对称矩阵,空间浪费。
当点多边少时,空间浪费多。
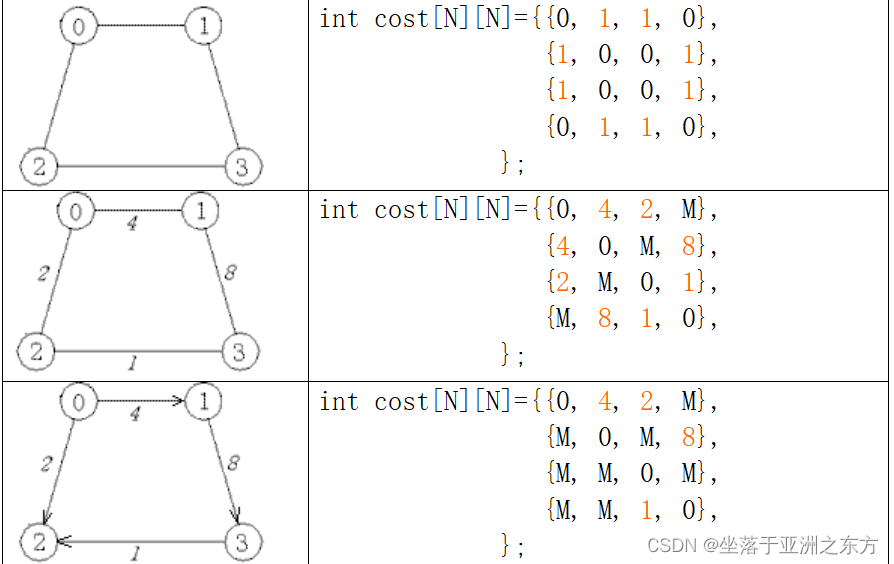
2、算法思考
针对以上三图的存储结构,分析:
①在无向图中,如何求顶点i的度?
②在有向图中,如何求顶点i的入度、出度?
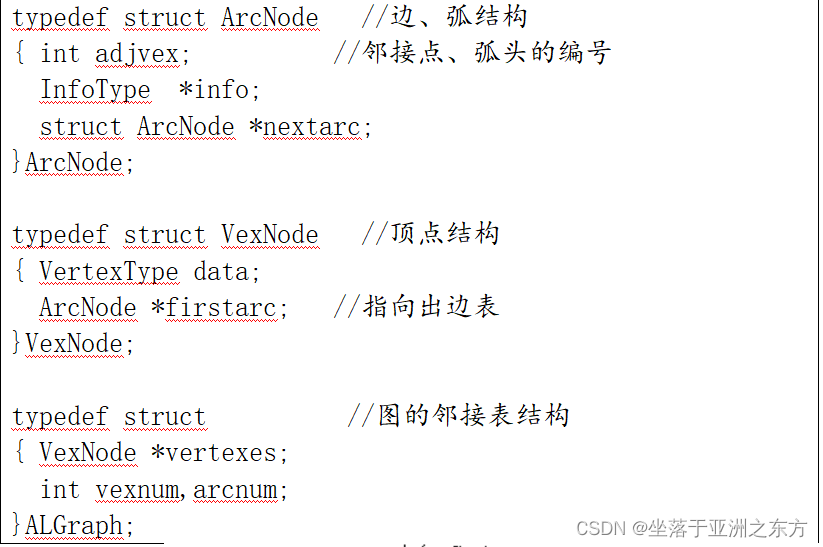
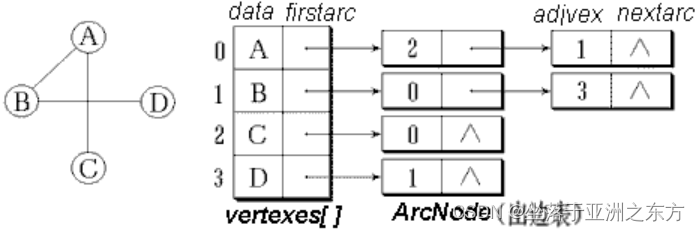
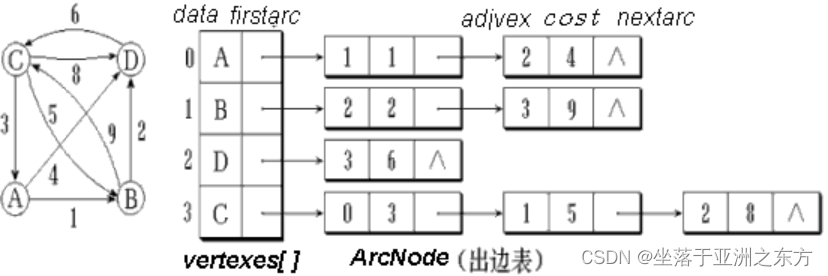
二、邻接表
1、结构分析
图的变化特征:顶点变化少,关系变化多。
顶点表: 顺序结构。边/弧表:动态链表。
带权图的邻接表
2、建立有向图邻接表的算法
①初始化一个无关系的邻接表结构
void ALGraph_Init(ALGraph &G, VertexType data[],int n)
{ G.vexnum=n; G.arcnum=0; // n为顶点数
G.vertexes=(VexNode )malloc(nsizeof(VexNode));
for(i=0; i<n; i++) // 初始化空关系图
{ G.vertexes[i].data=data[i];
G.vertexes[i].firstarc=NULL;
}
}
②插入一个弧<v1,v2>
void ALGraph_Insert(ALGraph &G,int v1,int v2)
{ ArcNode *p;
p=(ArcNode *)malloc(sizeof(ArcNode));
p->adjvex=v2;
p->nextarc=G.vertexes[v1].firstarc;
G.vertexes[v1].firstarc=p; //首插入
G.arcnum++;
}
提醒:用不同插入方法,得到邻接表不一样。
3、邻接表的简单应用
①在无向图中,求顶点i的度?
在有向图中,求顶点i的出度?
int ALGraph_OutDegree(ALGraph G, int i)
{ int n; ArcNode *p;
p=G.vertexes[i].firstarc;
for(n=0; p; p=p->nextarc) n++;
return(n);
}
②在有向图中,如何求顶点i的入度?
int ALGraph_InDegree(ALGraph G, int i)
{ ArcNode *p; int k, n=0;
for(k=0; k<G.vexnum; k++)
for(p=G.vertices[k].firstarc; p; p=p->nextarc)
if(p->adjvex==i) n++;
return(n);
}
三、逆邻接表
1、结构分析
弧表中的结点是弧尾。
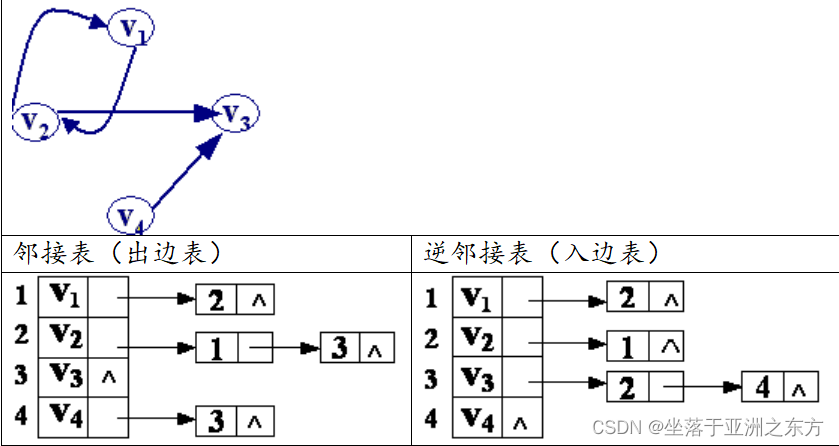
2、算法思考
如何求入度、出度? 与邻接表恰好相反
第三节 图的遍历
图遍历定义:从某顶点出发,对每个顶点访问且仅访问一次。
图遍历与树遍历的比较:

本节以邻接表为基础讨论算法程序。也可采用其他结构。
一、深度优先搜索DFS(Depth First Search)
1、算法
①设所有顶点都未曾被访问;(设置一个标记数组)
②从起点v出发,访问此顶点,同时设置访问标记;
③依次从v的未被访问过的邻接点出发进行DFS;
(效果:所有与v连通的顶点都被访问过)
④若所有顶点都已访问,则完成;否则,另择起点v,转至②。
例:已知邻接表,求遍历序列。
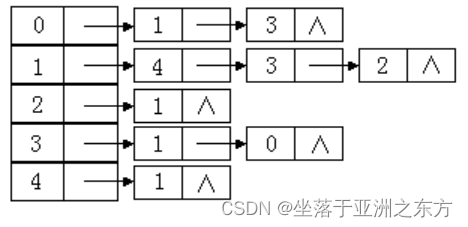
以顶点0为起点的DFS:0,1,4,3,2
以顶点3为起点的DFS:3,1,4,2,0
2、递归程序
类似于树的递归遍历
Boolean visited[MAX]; int time=0; // 用于跟踪程序
// 帽子函数
void DFSTraverse(ALGraph G)
{ if(G.vexnum==0) return;
for(v=0; v<G.vexnum; v++) visited[v]=FALSE; //实现步骤①
for(v=0; v<G.vexnum; v++) //实现步骤④
if(visited[v]==FALSE) DFS(G, v);
}
// 核心函数:遍历顶点v所在的连通分量
void DFS(ALGraph G, int v) //v为起点序号
{ ArcNode *p; int w;
printf(v); visited[v]=TRUE; // 实现步骤②
// 实现步骤③
for(p=G.vertices[v].firstarc; p; p=p->nextarc)
{ w=p->adjvex;
if(visited[w]==FALSE)
DFS(G, w);
}
}
思考:
时间复杂度? O(e) e为边/弧数
二、广度优先搜索BFS(breadth first search)
相当于树的层次遍历。
1、算法
①设所有顶点都未曾被访问;
②将起点编号加入队列,同时设置访问标记;
③取队首元素,设为v,访问结点v;
④依次将v的各个未被访问过的顶点加入队列,同时设置访问标记;
⑤若队列不空,则循环执行③④,否则⑥;
⑥若所有顶点都已访问,则完成;否则,另择起点V,转至②。
例:已知邻接表,求遍历序列。
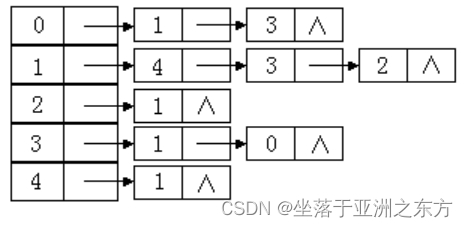
以顶点0为起点的BFS:0,1,3,4,2
以顶点3为起点的BFS:3,1,0,4,2
2、程序
Boolean visited[MAX];
// 帽子函数
void BFSTraverse(ALGraph G)
{ if(G.vexnum==0) return;
for(v=0; v<G.vexnum; v++) visited[v]=FALSE; //实现步骤①
for(v=0; v<G.vexnum; v++) //实现步骤⑥
if(visited[v]==FALSE) BFS(G,v);
}
// 核心函数:遍历顶点v所在的连通分量
// 每个顶点出队列后,被访问
void BFS(ALGraph G,int v)
{ Queue Q; ArcNode *p;
Q_Init(Q);
Q_Enter(Q,v); visited[v]=TRUE; // 步骤②
while(!Q_Empty(Q)) // 步骤⑤
{ v=Q_Leave(Q); printf(v); //步骤③
for(p=G.vertices[v].firstarc; p; p=p->nextarc) //步骤④
{ w=p->adjvex;
if(visited[w]==FALSE)
{ Q_Enter(Q, w); visited[w]=TRUE; }
}
}
}
上机:以邻接表为结构存储图,深度、广度遍历之。
第四节 最小生成树
一、最小生成树(MST:Minimum Spanning Tree)
问题对象:连通无向图G。
MST:各边权值之和最小的生成树。
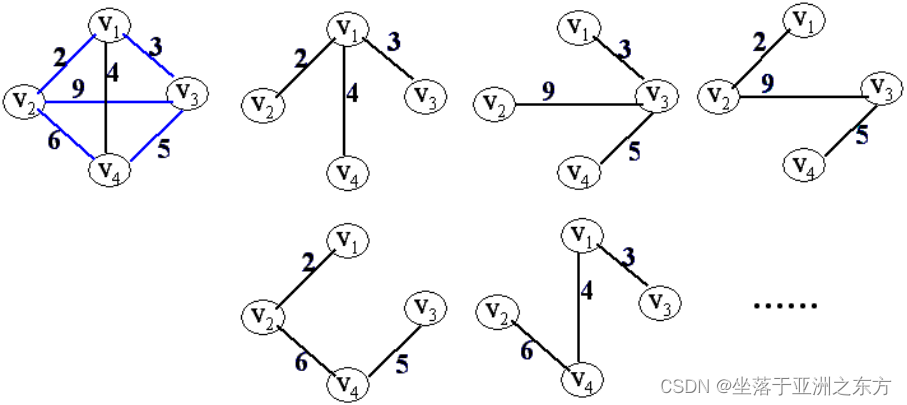
MST的构成:n个顶点,n-1条边。
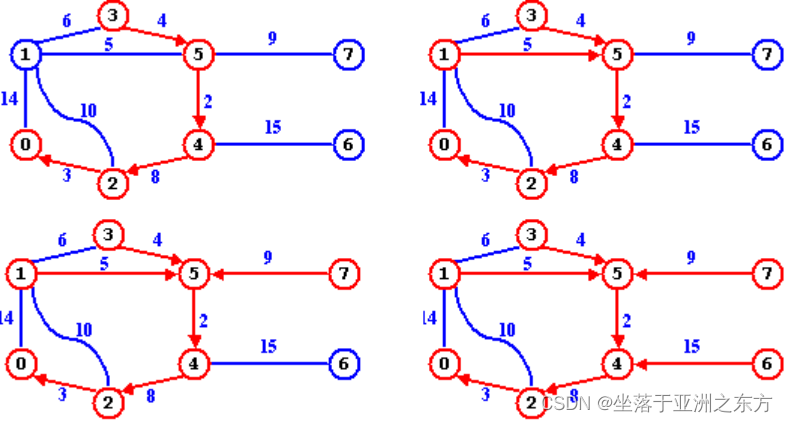
二、Prim算法
连通图G=(V,E),从起点v出发,构造最小生成树T=(VT,ET)。
1、算法思路
①初始化VT={v},ET={ }。
②找权值最小的(Vp,Vq), Vp∈VT, Vq∈V-VT;
③将(Vp,Vq)并入ET,同时Vq并入VT;
④重复②③步骤n-1次。
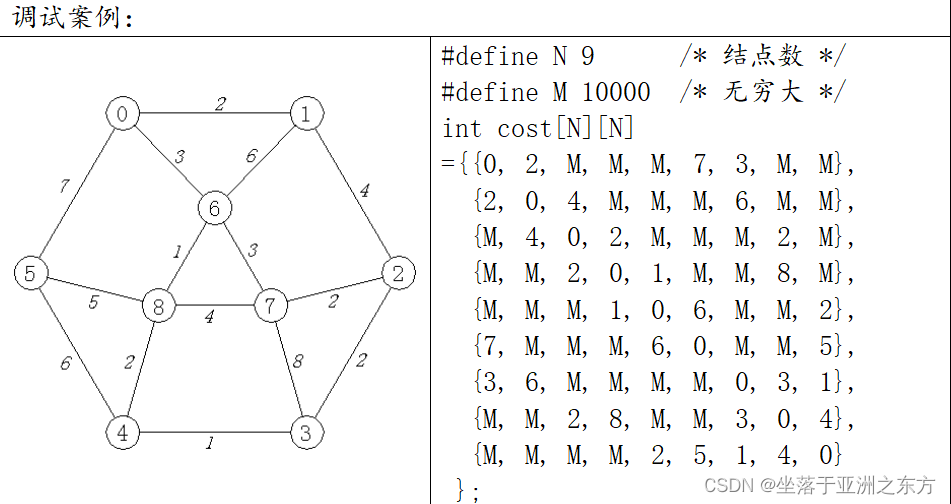
2、数据结构
①图的结构
需要频繁地读取二点间的权值,采用邻接矩阵。
②辅助结构
针对:“找权值最小的(Vp,Vq), Vp∈VT, Vq∈V-VT”
设计结构:VT外每个顶点到VT的最短距离。
typedef struct
{ float distance; // VT外顶点到VT的最短距离
int VexInTree; // VT对应的顶点编号
} ShortDist;
ShortDist SDs[N];
以V4为起点的初始化SDs[N]:

注意:SDs[i].Distance=0的含义:顶点i已在生成树中
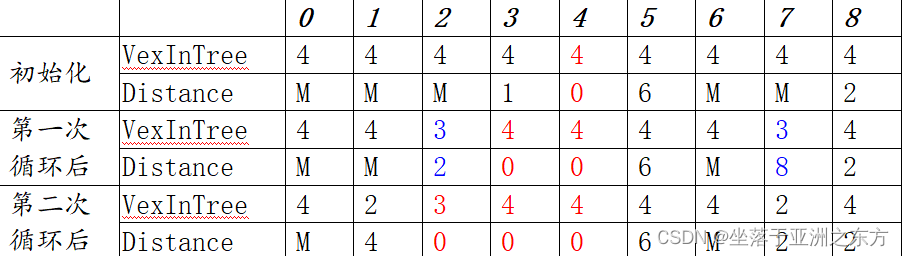
3、算法
①初始化SDs[N];
②在SDs[N]中,找出Distance最小非0值的下标k;
③(SDs[k].VexInTree,k)为生成树的边;
k是VT外某点,SDs[k].VexInTree是VT内某点;
④SDs[k].Distance=0,即顶点k并入生成树;
⑤若cost[k][i]<SDs[i].Distance,修改SDs[i];
⑥重复②③④⑤
4、程序一:求MST的所有边
为便于程序规范化,补充边/弧结构:
typedef struct { int begin,end,cost;} EDGE;
// v为起点序号, tree[]存储MST的所有边
void MST_prim(int cost[][N],int v,EDGE tree[])
{ ShortDist SDs[N]; int i,j, k,min;
for(i=0;i<N;i++)
{ SDs[i].VexInTree=v; SDs[i].Distance=cost[v][i]; }
for(i=0;i<N-1;i++)
{ for(min=M,j=0; j<N; j++) //找最小非0值的下标k
if(SDs[j].Distance!=0 && SDs[j].Distance<min)
{ min=SDs[j].Distance; k=j; }
tree[i].begin=SDs[k].VexInTree; tree[i].end=k;
tree[i].cost=SDs[k].Distance;
SDs[k].Distance=0; // 将顶点k纳入生成树中
for(j=0; j<N; j++) // 修改SDs[]
if(cost[k][j]<SDs[j].Distance)
{ SDs[j].Distance=cost[k][j]; SDs[j].VexInTree=k; }
}
}
调试案例的执行过程:
请同学补充完成。
4、算法分析
设图的顶点数为n,
时间复杂度: O(n2)
空间复杂度: O(n)
5、程序二:求MST的树结构
// 生成一棵双亲表示法的树,存于Parent[]中
// v为起点序号
void MST_prim(int cost[][N],int v,int Parent[])
{ ShortDist SDs[N]; int i,j, k,min;
for(i=0;i<N;i++)
{ SDs[i].VexInTree=v; SDs[i].Distance=cost[v][i]; }
Parent[v]=-1;
for(i=0;i<N-1;i++)
{ for(min=M,j=0; j<N; j++) // 找最小非0值的下标k
if(SDs[j].Distance!=0 && SDs[j].Distance<min)
{ min=SDs[j].Distance; k=j; }
Parent[k] = SDs[k].VexInTree;
SDs[k].Distance=0; // 将顶点k纳入生成树中
for(j=0; j<N; j++) // 修改SDs[]
if(cost[k][j]<SDs[j].Distance)
{ SDs[j].Distance=cost[k][j]; SDs[j].VexInTree=k; }
}
}
调试案例: 留意Parent[]的变化
三、Kruskal算法
连通图G=(V,E),构造最小生成树T=(VT,ET)。
1、思路
①尽可能选择n-1条权值最小的边;
②但不能构成回路。
显然,图的存储结构采用有序的边/弧表结构
typedef struct { int begin,end,cost;} EDGE;
typedef struct
{ EDGE *edges; // 边数组
int vn, en; // vn为顶点数, en为边数
} Graph;
2、算法
①初始化VT=V,ET={},即n个顶点是n个连通分量;
②选择权值最小的边(Vp,Vq);
③若Vp、Vq不属于同一连通分量,将(Vp,Vq)并入ET;
否则,舍弃。
④重复②③,直至选取了n-1条边。
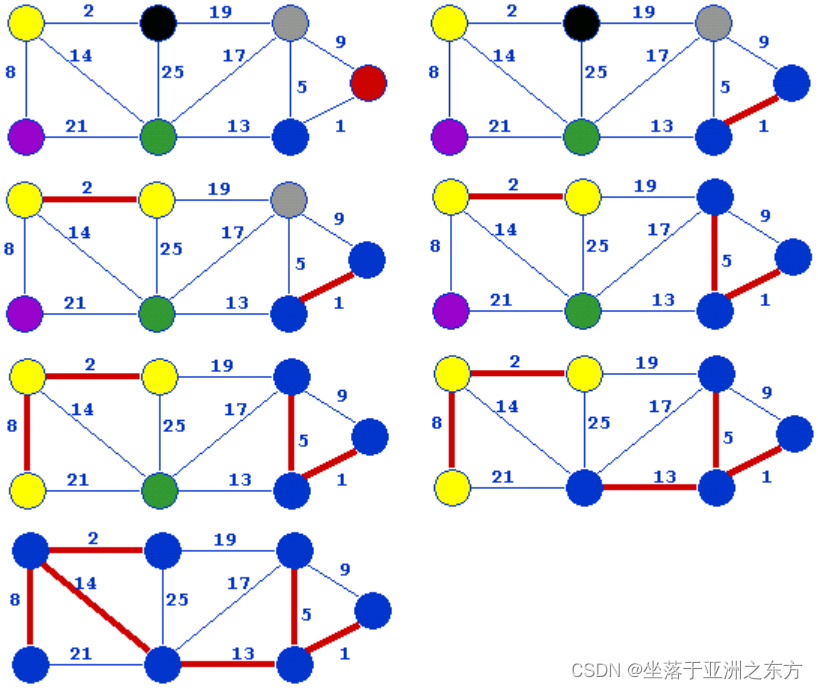
核心操作:连通分量的合并=子集的合并。
3、集合的存储结构
采用树/森林的双亲表示法(子集树)

初始化N个子树: parents[0…N-1]=-1
4、程序:求MST的所有边
// tree[]存储MST的边
void MST_kruskal(Graph G, EDGE tree[])
{ int *parents,begins,ends,i,k;
parents=(int )malloc(G.vnsizeof(int));
for(i=0;i<G.vn;i++) parents[i]=-1;
for(k=0,i=0; i<G.en; i++) // 选边
{ begins=find(parents, G.edges[i].begin);
ends =find(parents, G.edges[i].end);
if(begins!=ends)
{ parents[begins]=ends; // 合并子集树
tree[k] =G.edges[i]; k++;
if(k==G.vn-1) return; // 找到了vn-1条边
}
}
}
求子集编号,即子集树根结点的下标
int find(int parents[],int f)
{ while(parents[f]>=0) f=parents[f];
return(f);
}
5、调试案例
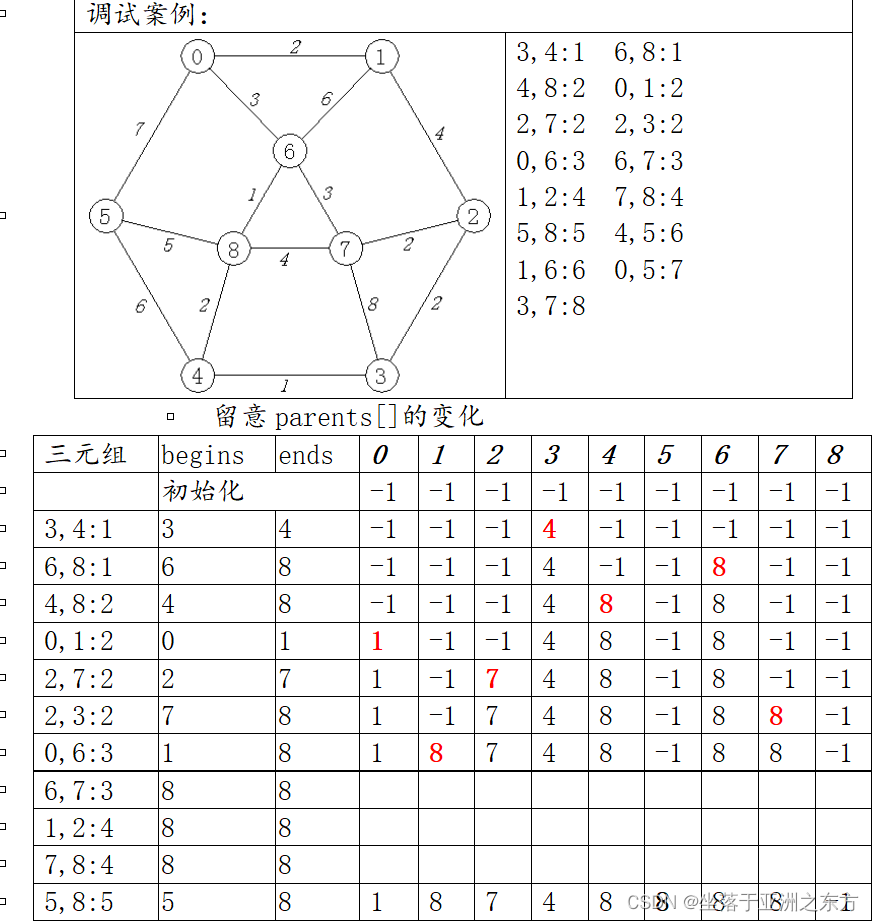
提示:算法完成时,MST的树结构已在parents[]之中。
6、算法分析
设图的顶点个数为n,边数为e。边数组已经按权值有序。
空间复杂度: O(n)
时间复杂度:
“选边” : 最好O(n); 最差O(e)
“求子集”: 最好O(log2n);最差O(n)
7、Prim算法和Kruskal算法的比较
Prim算法: 适合稠密图
Kruskal算法:适合稀疏图
四、程序设计方法之一:贪心法
用局部最优解,组合全局最优解。
作业:
纸笔调试Prim算法、Kruskal算法。
思考题:
如何判断“(e,f)(a,b)(b,c)(g,a)(c,d)(d,e)(f,g)”是否存在环?
第五节 最短路径
路径长度:
无权图:路径上边/弧的个数。
带权图:路径上边/弧的权值之和。
本节对象:带权(权>=0)图
思考:为什么约束:权>=0
提醒:边数多的路径可能比边数少的路径更短。
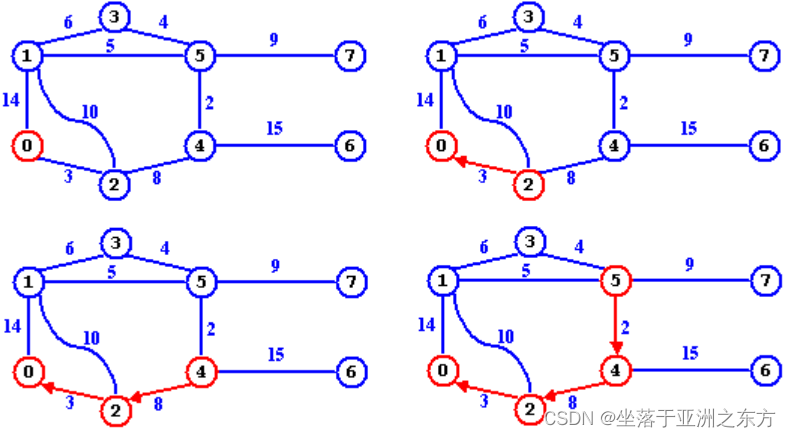
一、单源点的最短路径(Dijkstra,1959)
1、思路
性质:最短路径由最短子路径组成。
策略:由近及远计算到各顶点的最短路径。
2、数据结构
设G=(V,E),源点为v。
集合T:已找到最短路径的顶点,初始为{v}。
集合S:其余顶点,S=V-T。
如何表示集合操作?
设立数组set[0,…,N-1]。
初始化set[0,…,N-1]=S, set[v]=T。
如何表示v到各顶点的最短路径长度:
设立数组dist[0,…,N-1]。
初始化 dist[j]=(v,j)的权。
=》图采用邻接矩阵cost[N][N]。
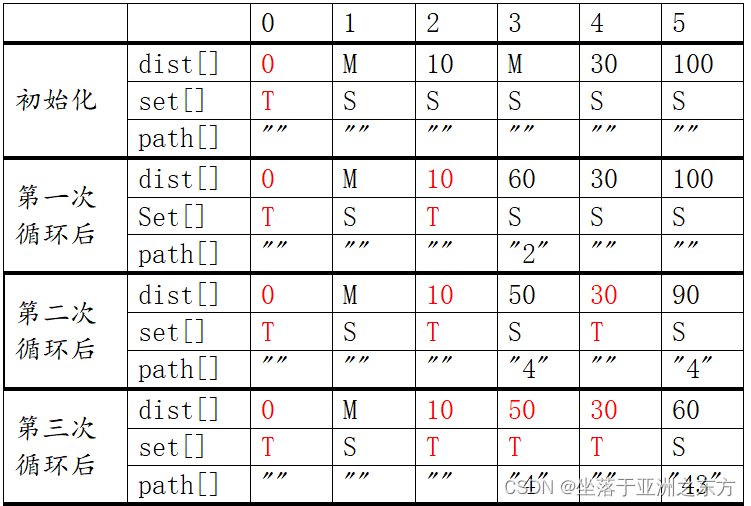
3、算法
①根据源点v,初始化set[]、dist[];
②从S集中选顶点w,使得dist[w]=Min{ dist[i] };
③将w并入T;
④修改从v出发到S中各顶点的最短路径长度;
if(dist[w]+cost[w][i]<dist[i]) // 记作三角不等式
dist[i]=dist[w]+cost[w][i]
⑤重复②③④步骤N-1次。
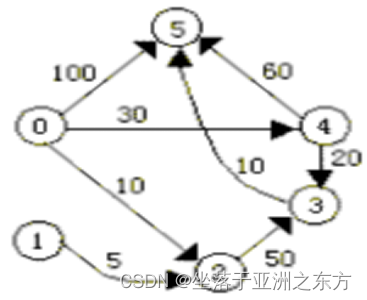
案例演示
4、程序:求最短路径长度和最短路径。
红色代码仅与最短路径有关。
#define N 6 // 顶点数
#define S 0 // 尚未求出最短路径
#define T 1 // 已经求出最短路径
main()
{ float cost[N][N]={……},
float dist[N]; char path[N][N]; /* 路径字符串 /
dijkstra(cost,0,dist,path); / 起点为顶点0 /
}
//计算v到其余各顶点的最短距离dist[],最短路径path[N][N]
void dijkstra(float cost[][N],int v,float dist[],char path[][N])
{ int set[N], i,j,nearest_v;
for(i=0; i<N; i++)
{ dist[i]=cost[v][i]; set[i]=S;
path[i][0]=‘\0’; / 路径字符串初始化为空 /
}
for(set[v]=T,i=1; i<N; i++)
{ nearest_v=mincost(dist,set);
for(set[nearest_v]=T,j=0; j<N; j++)
if(set[j]==S && dist[nearest_v]+cost[nearest_v][j]<dist[j])
{ dist[j]=dist[nearest_v]+cost[nearest_v][j];
strcat(path[j],path[nearest_v],nearest_v); //合并路径
}
}
}
//在S集合中找顶点w,dist[w]是dist[]中的最小值/
int mincost(int dist[],int set[])
{ int i,min,w;
for(min=M,i=0; i<N; i++) / N为顶点数 */
if(set[i]==S && dist[i]<min) { min=dist[i]; w=i; }
return(w);
}
// 合并路径
void strcat(char path_j[],char path_w[],int w)
{ int i;
for(i=0; path_w[i]!=‘\0’; i++) path_j[i]=path_w[i];
path_j[i++]=w+‘0’; path_j[i]=‘\0’;
}
5、算法分析
空间复杂度: O(n)
稠密图:采用邻接矩阵结构,时间复杂度为O(n2)
稀疏图:采用邻接表结构,时间复杂度为O(e+nlogn)
6、思考
已知某小区布局图,如何选择最佳设店地址?
二、多源点的最短路径
算法一:重复Dijkstra算法,时间复杂度为O(N3)。
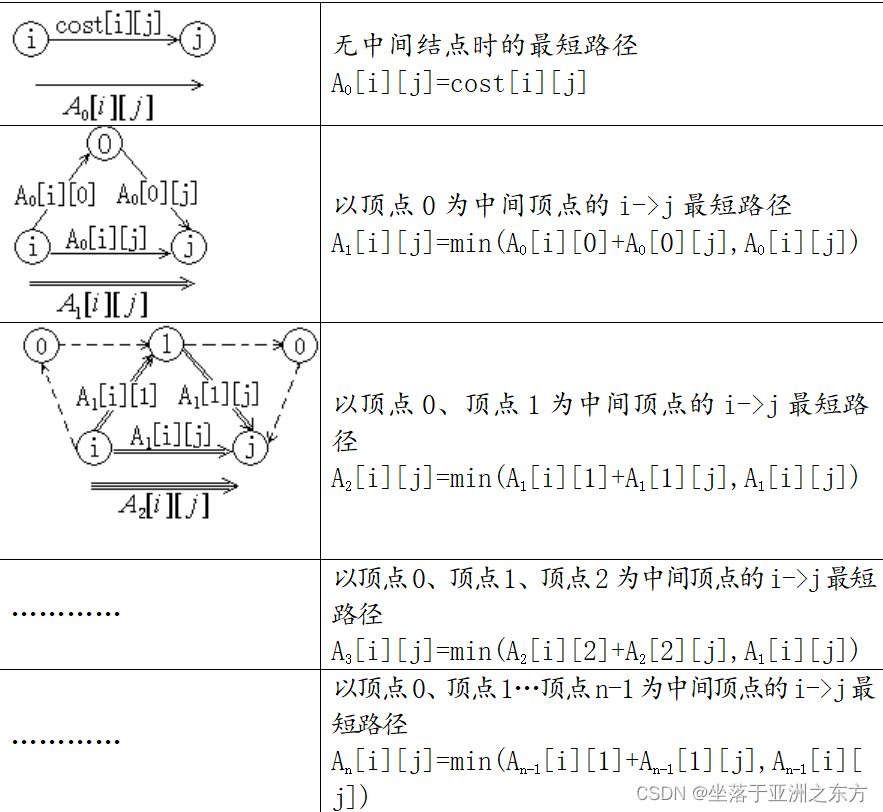
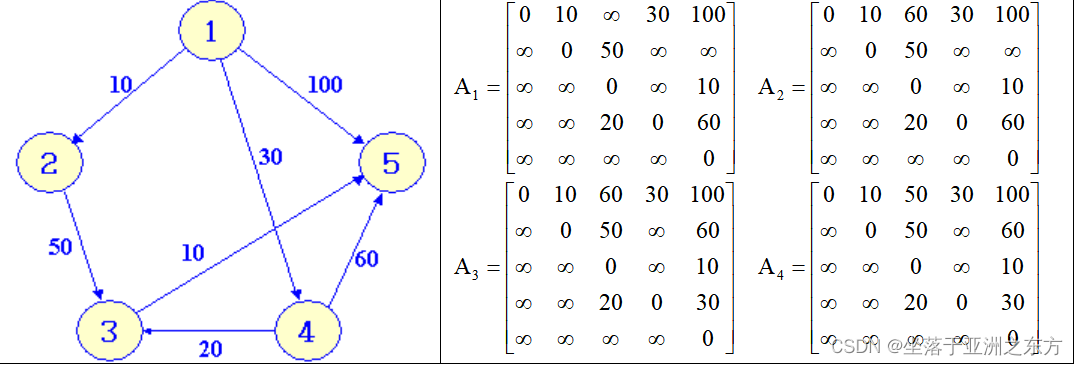
算法二:Floyd算法
1、数据结构
采用邻接矩阵
2、算法
3、程序:求最短路径长度和最短路径。
红色代码仅与最短路径有关。
#define N 5 // 顶点数
main()
{ float cost[N][N]={……};
char path[N][N][N]; /* 路径字符串初始化为空 /
floyd(cost,path)
}
// A[][N]最终变为各顶点间的最短距离,path[N][N][N]为最短路径
void floyd(int A[][N], char path[][N][N])
{ int i,j,k;
for(i=0;i<N;i++)
for(j=0;j<N;j++) path[i][j]=“”; / 初始化为空 */
for(k=0;k<N;k++)
for(i=0;i<N;i++)
for(j=0;j<N;j++)
if(A[i][k]+A[k][j]<A[i][j])
{ A[i][j]=A[i][k]+A[k][j];
strcat(path[i][j],path[i][k],k,path[k][j]);
}
}
//合并路径
void strcat(char p_ij[],char p_ik[],int k,char p_kj[])
{ int i,j;
for(i=0; p_ik[i]!=‘\0’; i++) p_ij[i]=p_ik[i];
for(p_ij[i++]=k+‘0’,j=0; p_kj[j]!=‘\0’; j++,i++)
p_ij[i]=p_kj[j];
p_ij[i]=‘\0’;
}
4、算法分析
时间复杂度:O(N3)。
比邻接矩阵的Dijkstra算法,快常数倍数。
作业:
纸笔调试Dijkstra算法、Floyd算法。
第六节 有向无环图
工程进度安排组织:有向无环图。
活动(Activity):工程中的子工程。
无环:没有回路。
一、AOV图之拓扑排序
1、概念
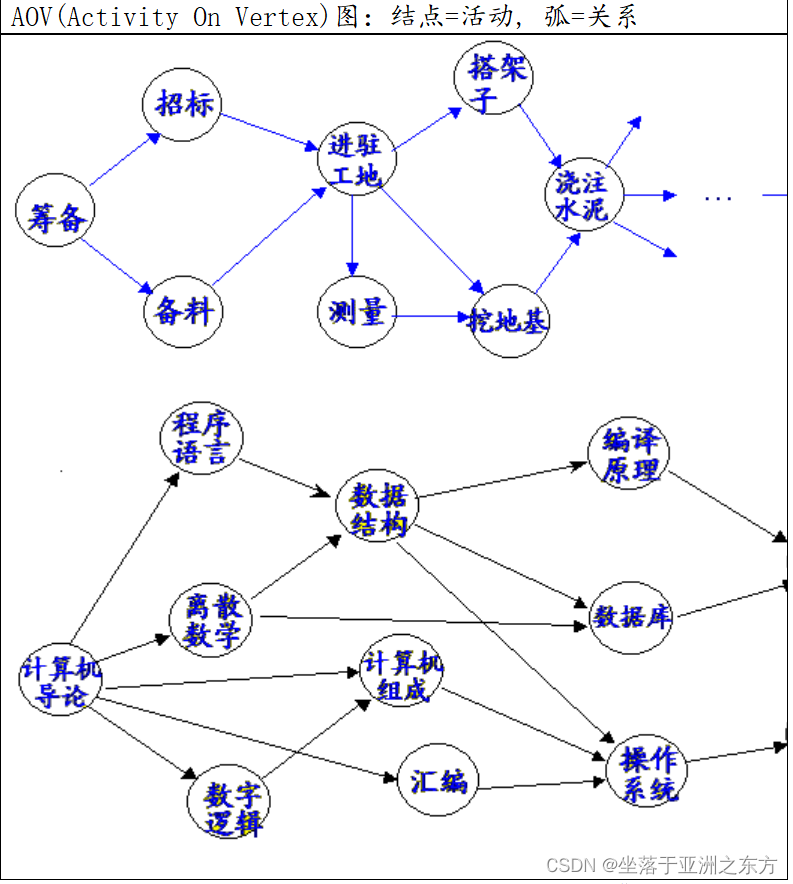
AOV弧集的性质:自反、反对称、可传递。=》偏序关系
全序关系:任意二个结点间存在关系的偏序关系。
拓扑排序:从偏序关系中得到全序序列(拓扑序列)。
提醒:拓扑序列不唯一。
2、算法思路
①选择一个入度为0的顶点v,将其输出;
②删去顶点v及其发出的所有弧;
③重复①②,直至无入度为0的顶点;
④若顶点已全部输出,则网络中无回路;否则,必有回路。
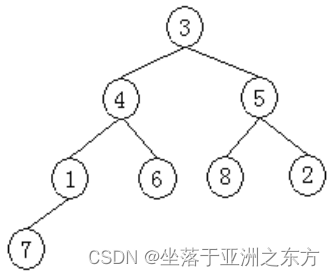
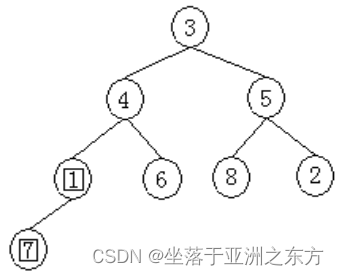
试写出下图的拓扑序列:

3、数据结构
①设计出发点
需要频繁计算入度=》采用逆邻接表
需要频繁搜索弧头=》采用邻接表
采用十字链表? 小题大做
②设计方案
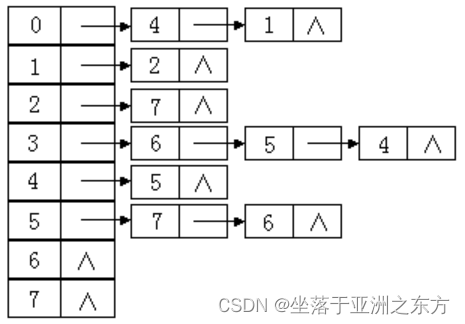
4、算法细化
对于入度为0的顶点编号表,采用栈结构加以组织:
①将所有入度为0的顶点编号进栈;
②出栈,输出栈顶元素Vi;
③将Vi的所有后继顶点入度减1;若入度为0,则相应顶点编号进栈;
④重复②③,直至栈空;
⑤若输出顶点数=图中顶点数,则无回路;否则,必有回路。
思考:能否使用队列存储入度为0的顶点编号?
5、程序一:采用顺序栈
struct node //简化:设VexNode和ArcNode相同
{ int vertex;
struct node *link;
};
typedef struct node NODE;
Status toposort(NODE adjlist[],int indegree[],int n,int topo[])
{ int stack,top=0; / 入度为0的顶点编号栈 */
int i,out,k,count=0;
NODE p;
stack=(int )malloc(nsizeof(int));
for(i=0; i<n; i++) / 入度为0者进栈 /
if(indegree[i]==0) { stack[top]=i; top++; }
while(top>0)
{ top–; out=stack[top]; / out为出栈元素 */
topo[count]=out; count++;
for(p=adjlist[out].link; p; p=p->link)
{ k=p->vertex; indegree[k]–;
if(indegree[k]==0) { stack[top]=k; top++; }
}
}
if(count<n) return(FALSE); else return(TRUE);
}
结果topo[]: 3,0,1,2,4,5,6,7
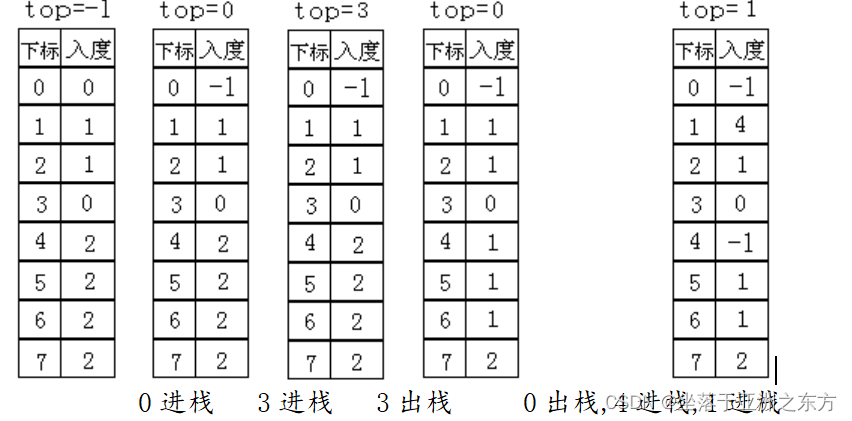
6、程序二:在入度表中实现静态链栈
Status toposort(NODE adjlist[],int indgree[],int n)
{ int i,top=-1,out, k, count=0;
NODE *p;
for(i=0;i<num;i++)
if(indgree[i]==0) { indgree[i]=top; top=i; }
while(top!=-1)
{ out=top; top=indgree[top];
printf("%d, ",out); count++;
for(p=adjlist[out].link; p; p=p->link)
{ k=p->vertex; indgree[k]–;
if(indgree[k]==0) { indgree[k]=top; top=k; }
}
}
if(count<n) return(FALSE); else return(TRUE);
}
入度表的变化过程:
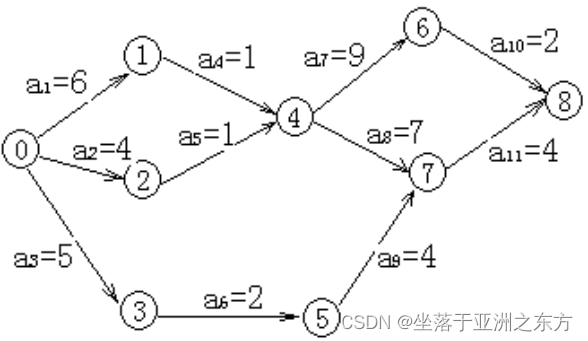
二、AOE图之关键路径(Critical Path)
AOV图的定性分析 => AOE图的定量分析
概要的先后关系 => 精确的时间关系
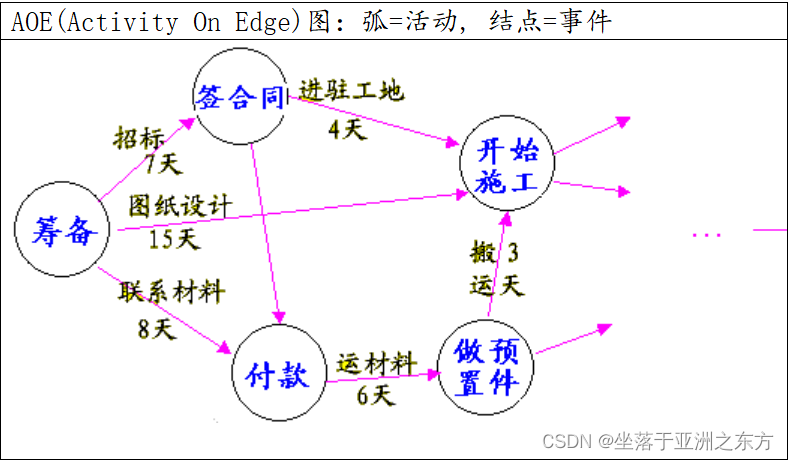
一个源点:入度为0的顶点,对应开工之日。
一个汇点:出度为0的顶点,对应完工之日。
1、AOE图与关键路径
活动的权:活动持续的时间、费用……。
事件:所有入弧活动已完成的状态。
所有出弧活动可以开始的状态。
问题:①完成整个工程所需最短时间?
②哪些活动是影响进度的关键活动?
完成工程的最短时间:从源点到汇点的最长路径的长度。
关键路径:从源点到汇点的最长路径。
2、算法推导

①分析活动ai
活动ai的最早开始时间early[i]:
从V0=> Vj 的最长路径。
活动ai的最迟开始时间last[i]:
满足不推迟整个工期的要求。
活动ai的时间余量:
last[i]-early[i]
活动ai是关键活动的条件:
last[i]=early[i]
②如何计算early[i]、last[i]?
活动的开始受弧尾事件j、弧头事件k的约束。
先求各事件的最早发生时间v_early[]
最迟发生时间v_last[]
early[i]=v_early[j]
last[i]=v_last[k]- Cjk
③如何计算v_early[]、v_last[]?
前向计算
v_early[源点]=0;
v_early[j]=max{ v_early[i]+ Cij }
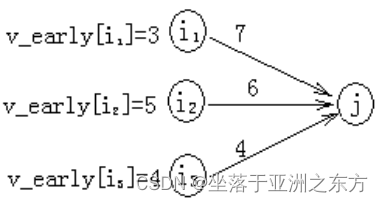
提醒:为保证Vj所有前驱事件的最早发生时间已经求出,必须按拓扑有序序列的次序,依次计算v_early[j]
后向计算
v_last[汇点]=v_early[汇点]
v_last[i]=min{ v_last[j]- Cij }
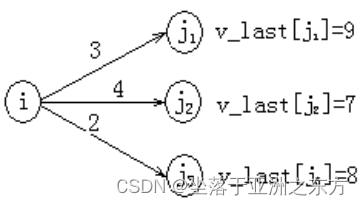
提醒:为保证Vj所有后继事件的最迟发生时间已经求出,必须按逆拓扑有序序列的次序,依次计算v_last[j]。
3、案例演示

4、关键路径算法
1、输入弧数据,建立AOE的存储结构;
2、进行拓扑排序,得到拓扑序列S;
3、从源点出发,按S的次序求最早发生时间v_early[];
4、从汇点出发,按S的逆序求最迟发生时间v_last[];
5、计算各弧的early[]、last[];
6、打印early[i]=last[i]的弧。
第九章 查找
查找表:同类记录的集合。
关键字:记录的标识。
typedef struct { KeyType key;…… } ElemType;
查找:根据给定关键值,在查找表中定位一个关键字等于给定值的记录。
查找成功、查找失败
静态查找表:查找表不变
动态查找表:查找表可能变化
第一节 静态查找表
一、顺序表的查找
1、结构
typedef struct
{ ElemType *elem; //动态、静态顺序表
int length;
}SSTable;
2、无序顺序表的顺序查找算法
从表的一端开始,逐个比较记录的关键字。
int search_seq(SSTable ST, KeyType key1)
{ for(i=0; i<ST.length; i++)
if(ST.elem[i].key==key1) return(i);
return(-1); //查找失败的标记
}
3、有序顺序表的顺序查找算法
int search_seq(SSTable ST, KeyType key1) // 增序顺序表
{ for(i=0; i<ST.length && ST.elem[i].key<=key1; i++)
if(ST.elem[i].key==key1) return(i);
return(-1); //查找失败的标记
}
4、性能分析
针对无序顺序表的顺序查找算法
时间复杂度:O(n) =》效率低
平均查找长度:比较次数的期望值。
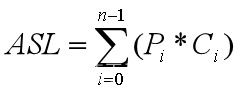
Pi :查找第i条记录的概率
Ci :找到第i条记录的比较次数。
例:等概率查找成功的情形:

5、算法补充
查找最大值、最小值;
查找最小值的下标;
查找次小值的下标;
二、有序顺序表之折半查找算法
1、算法思路
查字典的方法:逐步缩小查找范围,直至得到结果。
2、算法
最小关键值记录的位置:low
最大关键值记录的位置:high
中间位置:mid=(low+high)/2
// ST.elem[0]…ST.elem[ST.length-1]是线性增序表
int bin_search(SSTable ST, KeyType key1)
{ int low,high,mid;
low=0; high=ST.length-1;
while(low <= high) // 留意=号
{ mid=(low+high)/2;
if(key1==ST.elem[mid].key) return(mid);
if(key1< ST.elem[mid].key) high=mid-1;
else low=mid+1;
}
return(-1);
}
2、性能分析
设顺序表各元素编号:0,1,2,3,4,5,6,7
二叉判定树:

除最低层外是一棵满二叉树。
树的深度为
查找成功的比较次数=该记录的深度。
查找失败的比较次数=树的深度。
例:等概率查找成功的情形:
(理由:半数以上的结点处于最低二层中)
四、索引顺序表的查找
1、稠密索引策略
一个索引项对应一条记录。适用于:记录无序存放的结构。
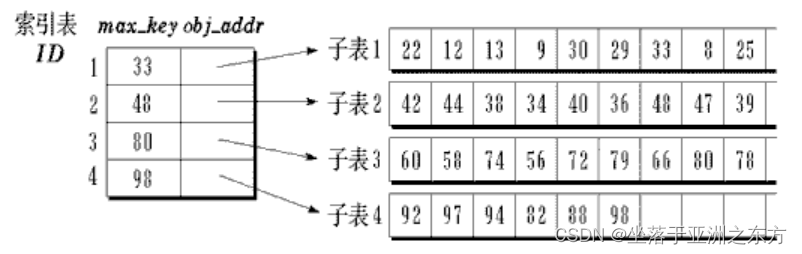
2、稀疏索引策略
一个索引项对应一组记录(子表)。
适用于:子表间记录必须有序,子表内记录必须无序。
性能分析
ASL=索引表的ASL+子表内ASL
例:查找表长为n,块长为s,索引项数b=n/s,对索引表进行折半查找,对子表进行顺序查找。请计算ASL。
ASL=log2b+s/2
3、多级索引策略
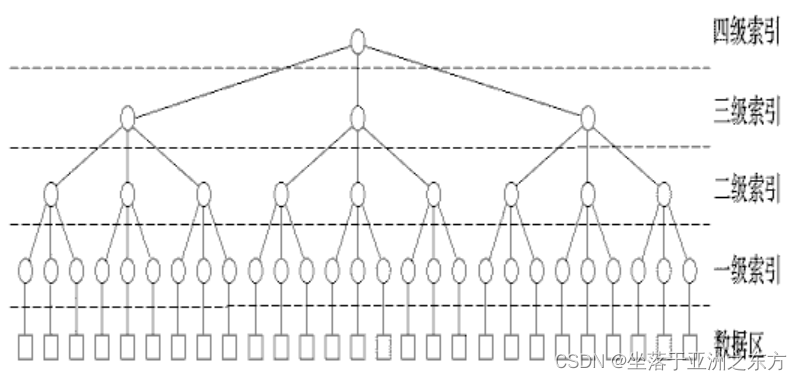
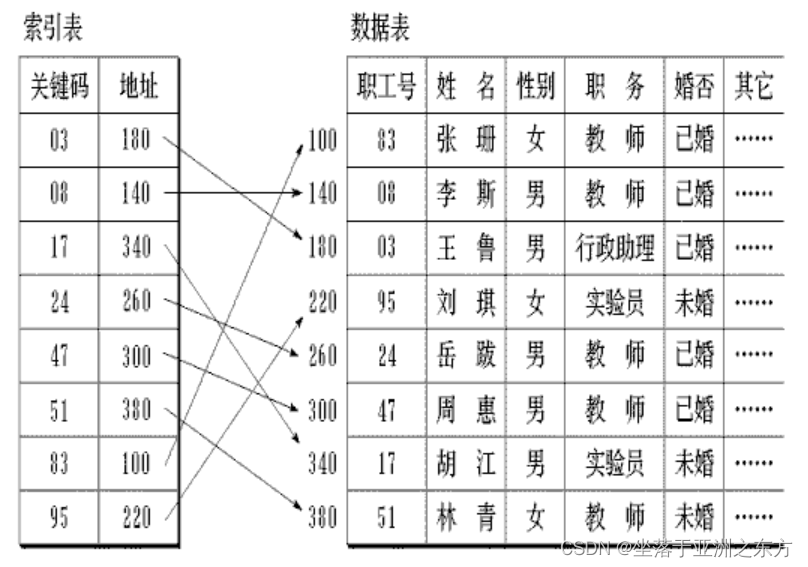
4、倒排表(Inverted Index List)策略
适用于:针对大数据表的多方式查找。
主关键码:唯一地标识该对象。
主索引表:用主关键码建立的索引表。
主索引表的结构:(关键码、记录存储地址)。
次关键码:其他一些经常搜索的属性。
次索引表:对每一个次关键码建立的索引表。
次索引表的索引项结构:
[次关键码的索引值、指针]
指针指向在该属性上具有该索引值的所有记录
倒排表:符合上述结构的次索引表。
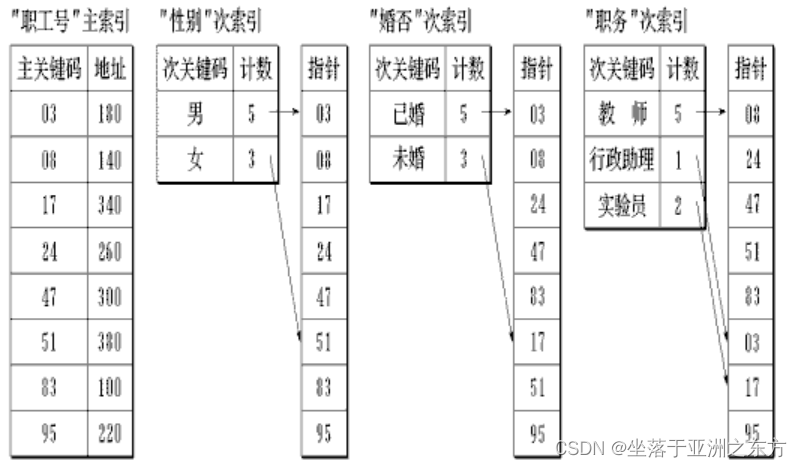
“倒排”的来由:在一般文件组织中的查找,是先找到记录,再找到该记录的属性值。而在上述查找,是先给定某属性值,再查找含有该属性值的记录。
作业:
1、已知某有序顺序表,计算其折半查找的ASL。
2、已知某索引顺序表的结构,计算其ASL。
第二节 动态查找表
表结构在查找过程中动态生成。
动态:查找失败,将新记录插入查找表。
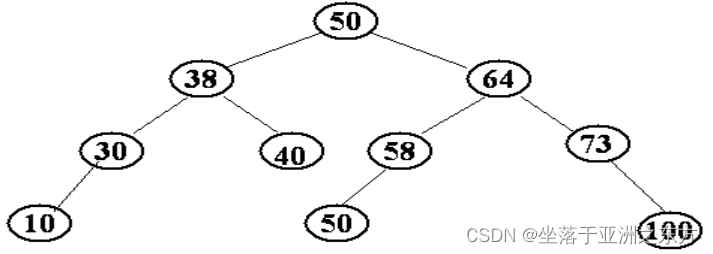
一、二叉排序树
1、定义
在二叉排序树中,对于每个结点p:
若左子树非空,其中所有结点的关键值小于p的关键值;
若右子树非空,其中所有结点的关键值大于*p的关键值。
struct BSTNode
{ ElemType elem;
struct BSTNode *lchild,*rchild;
};
typedef struct BSTNode BSTNode;
用途:
排序(中序遍历)。
查找(二叉查找树)
2、查找算法
在二叉排序树*root中,找键值为x的结点地址。
BSTNode *search(KeyType x, BSTNode *root)
{ while(root)
{ if(x==root->elem.key) return(root);
if(xelem.key) root=root->lchild;
else root=root->rchild;
}
return(NULL);
}
性能分析:
ASL:最好情况为O(log2n),相当于折半查找。
最差情况为O(n), 相当于顺序查找。
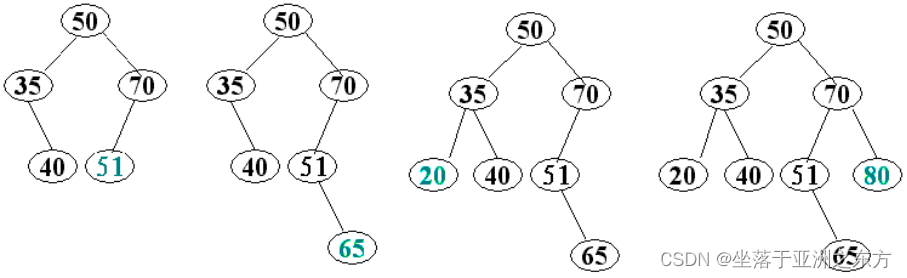
3、插入算法
若二叉排序树为空时?
若二叉排序树不为空?
示例:Keys={50,35,70,40,51,65,20,80}
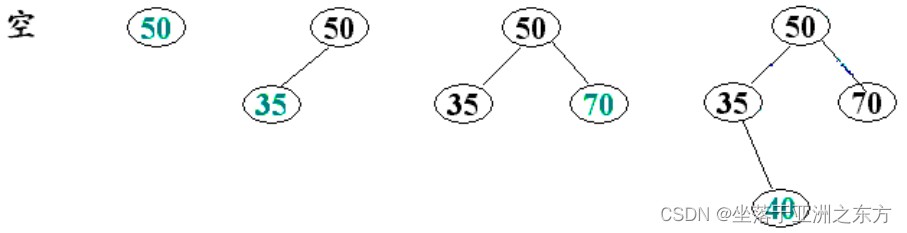
在根指针为root的二叉排序树中插入结点*newp
BSTNode * insert(BSTNode *root, BSTNode *newp)
{ BSTNode *p=root;
if(root==NULL) return(newp);
while(1)
{ if(newp->elem.key < p->elem.key)
if(p->lchild) p=p->lchild;
else { p->lchild=newp; return(root); }
else
if(p->rchild) p=p->rchild;
else { p->rchild=newp; return(root); }
}
}
4、应用实例:统计文件中字母、单词的使用次数
结构:
struct node
{ char word[M]; //单词
int weight; //出现次数
struct node *lchild, *rchild;
}
算法:
①每读入一个单词,查找二叉排序树
②查找成功,weight++;查找失败,插入新结点。
③中序输出二叉排序树。
上机:
已知某关键值序列,构造二叉排序树,中序遍历之。
第二节 动态查找表
二、二叉平衡树(AVL树)
问题由来:二叉排序树可能出现退化。
目标 :二叉排序树是AVL树。
1、定义
二叉平衡树是:
一个空树;或:
1)左右子树均为二叉平衡树;
2)左右子树的深度之差的绝对值<=1。
结点*p的平衡因子: 左子树深度-右子树深度。
depth(p->lchild) - depth(p->rchild)
二叉平衡树:所有结点的平衡因子=0或-1或1
编程:设二叉树结点结构含4个域:lchild、data、bf、rchlid,设计算法,求树中所有结点的平衡因子bf。
struct BSTNode
{ ElemType elem;
int bf;
struct BSTNode *lchild,*rchild;
};
typedef struct BSTNode BSTNode;
void bf(BSTNode *root)
{ if(!root) return;
root->bf=depth(root->lchild)-depth(root->rchild);
bf(root->lchild);
bf(root->rchild);
}
int depth(BiTNODE *root)
{ int left,right;
if(root==NULL) return(0);
left =Depth(root->lchild);
right=Depth(root->rchild));
return(max(left,right)+1);
}
第三节 哈希(hash)表
查找算法的基础:比较、计算。
一、定义
1、哈希方法的由来
能否通过对关键值的计算,直接得到待查记录的地址?
显然,记录的存放规则和查找规则必须一致。
规则=》哈希表函数(映射:关键值=>记录位置)
哈希函数值称为哈希地址。
哈希表: 按哈希表函数值来组织的查找表。
以计算为基础的查找方法,妙!
2、哈希查找的问题
能不能保证映射关系的一一对应?
关键值的分布:广、散 (如:0,5,15…),
查找表的地址空间:小、密集(如:0,1,2…),
可能存在关键值相同的记录。
不同关键值的记录,有相同的哈希地址:冲突。
冲突的关键值:同义词。
目标:均匀的哈希函数
哈希地址均匀分布在整个地址空间,冲突次数少。
二、哈希函数的构造
哈希函数的好坏,必须结合查找表的情况来分析。
1、直接定址法
直接取关键字的某个线性函数值作为哈希地址
如: hash(key)=key-1949
2、数字分析法
当关键字值的数位较多时,取其中几位作哈希地址。
如:以学号为关键字的情形: 867201……867266
3、取模法
将关键字值除以一个整数后所得的余数作为哈希地址。
可以保证哈希地址在有效的地址空间之内。
4、平方取中法
计算关键字值的平方,取中间若干位作为哈希地址。
5、叠加法
思路与平方取中法同出一辙,提高了计算速度。
将关键字值分成几部分,之和作为哈希地址。
好的哈希函数:
①计算效率高
②函数值不越界
③函数值的分布均匀
实际的哈希表,会多开辟一些的空间,以减少冲突。
装填因子=表中记录数/表长度
装填因子值大 =》 冲突可能性大。
三、哈希函数实例:高级语言中的关键字搜索系统
在编译过程中,需要频繁搜索关键字。
关键字表被设计成一个哈希表,可以找到一个不发生冲突的优秀哈希函数。
例:在Pascal语言中, 有26个关键字(保留字)。
哈希函数:H(Key)=L+g(key[1])+g(key[L])
L:关键字长度
key[1]:关键字的第一个字符
key[L]:关键字的最后一个字符
g(x): 从字符到数字的转换函数
四、冲突处理方法
冲突不可避免!
1、开放地址法
出现冲突时,沿一个地址序列逐个探测,直到找出一个空闲空间,将冲突记录存于此间。
只要哈希表不满,总是可行的。
Hi=(H(key)+di) MOD m
H(key):哈希函数,
m: 哈希表长,
di: 增量序列。
根据di的取法,又分为:
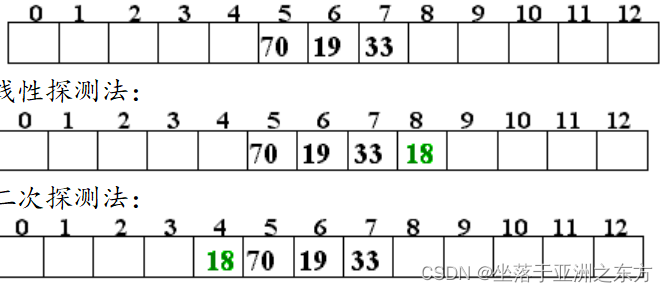
1)线性探测法 di=1,2,…m-1
2)二次探测法 di=1,-1,22,-22,…,k2,-k2
设某哈希表结构如下,H(k)=k MOD 13。现插入第4个记录(关键值为18)。
3)伪随机探测法
H0=H(key)
Hi=(Hi-1+p) MOD m p为质数
4)再哈希法
计算另一哈希函数,得到另一地址。以求避免冲突。
开放地址法小结:
优点:充分地利用了哈希表的空间
缺点:解决一个冲突,就为下一个冲突埋下了伏笔。
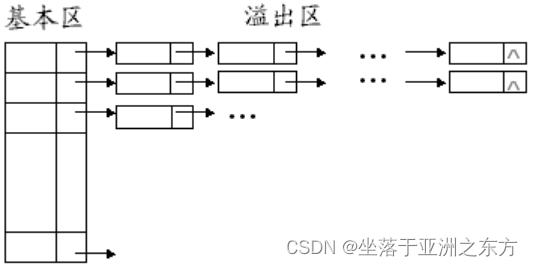
2、链地址法
方法一:将哈希表分成基本区和溢出区。
方法二:定义一个指针数组,指向哈希地址相同的记录链。
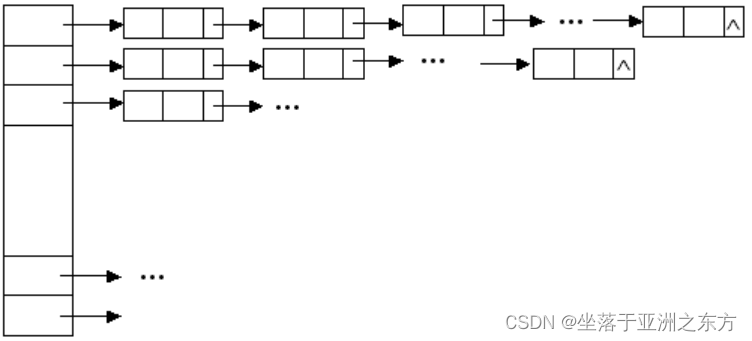
例:设哈希表为[0:9],哈希函数为H(k)=k Mod 10。将关键值为75,66,42,192,91,40,49,87,67,16,17,30,72,27的记录依次插入哈希表,请写出哈希表结构。
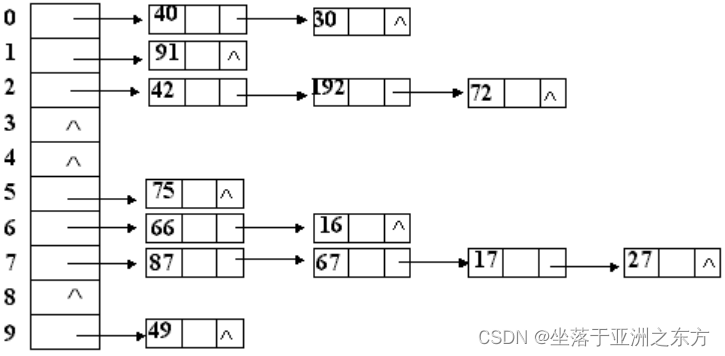
优点:查找性能高。
缺点:空间利用率降低。
五、性能分析
在开放地址法中:
反复计算比较,直至成功或遇到空闲单元(失败);
在链址法中:
一次计算,反复比较,直至成功或无结点可比较(失败)。
哈希查找的关键:
①根据数据的情形设计均匀的哈希函数
②合适的冲突处理方法。
例1:Hash表的地址空间为0…5,散列函数为H(key)=key mod 6,采用线性探测法处理冲突,将10,5,9,3,11依次存入Hash表,那么查找元素3,需要比较 次。
A、1 B、2 C、3 D、4
例2:针对上表计算,在等概率查找的情形下,查找成功时的平均查找长度?查找失败时的平均查找长度?
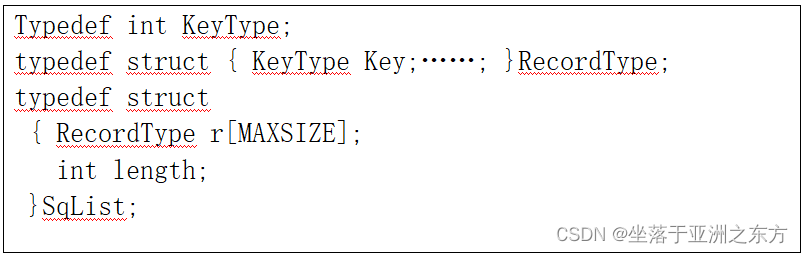
第十章 内部排序
排序:调整记录表中记录次序,使之按关键值有序(增序)。
记录表结构
内部排序:记录集全部在内存中。
类似战术问题。
外部排序:记录集部分在内存中,排序过程中,需访问外存。
类似战略问题。
稳定性:关键值相同的记录,排序前后的相对次序不变。
例:5 1 4 3 4 => 1 3 4 4 5 稳定
=> 1 3 4 4 5 不稳定
第一节 插入排序
一、直接插入
1)思路
起源于数据陆续达到的思路,摸牌的行为。
2)算法
设已存在一个有序子序列;
每趟:将一个记录按关键值大小插入到有序子序列中。
初始化时,有序子序列只有一个记录;
n-1趟后,有序子序列有n个记录。
3)程序
void InsertSort(SqList &L) // 增序
{ int i,j; RecordType tmp;
for(i=1; i<L.length; i++)
{ tmp=L.r[i];
for(j=i-1; j>=0 && L.r[j].key>tmp.key; j–)
L.r[j+1]=L.r[j]; //移位
L.r[j+1]=tmp;
}
}
时间复杂度? O(n2)
稳定排序? 稳定
第二节 交换排序
基本思想
记录间两两比较关键字,若为逆序,则交换位置。
一、简单交换排序
1、思路
相邻记录间两两比较、交换。
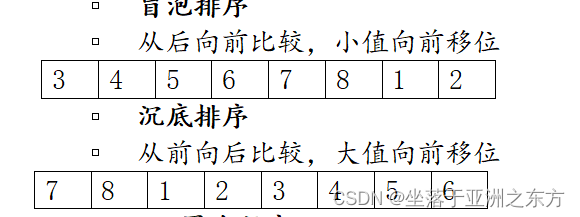
2、二种方案
冒泡排序
从后向前比较,小值向前移位
3、冒泡程序
void BubbleSort(SqList &L)
{ int i,j,flag; RecordType tmp;
for(i=0; i<L.length-1; i++)
{ flag=0; //避免无交换的排序趟
for(j=L.length-1; j>i; j–)
if(L.r[j].key<L.r[j-1].key)
{ tmp=L.r[j]; L.r[j]=L.r[j-1]; L.r[j-1]=tmp;
flag=1;
}
if(flag==0) break;
}
}
时间复杂度? O(n2)
稳定排序? 稳定排序
二、快速排序
1、由来
冒泡、沉底法:每趟将极大/小数置入到目标位置。
为什么不将中位数置入目标位置上呢?
如何确定中位数?
折中=》如何将任意值置入目标位置?
2、分治法的框架
设有序列a[L]……a[H],将任选记录置入目标位置a[i],
原序列分解二个子序列:
a[L]……a[i-1]:关键值均小于a[i];
a[i+1]……a[H]:关键值均大于a[i]。
对二个子序列,快速排序。
void QuickSort(SqList &L,int low,int high)
{ if(low>=high) return; //子序列只有一个记录
i=Partition(L, low, high);
QuickSort(L,low,i-1);
QuickSort(L,i+1,high);
}
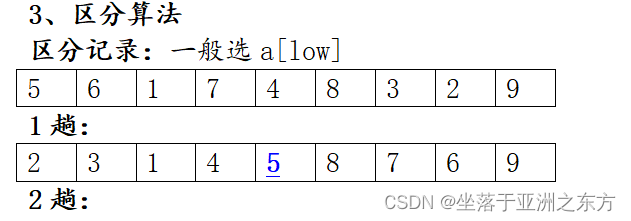
3、区分算法
区分记录:一般选a[low]
4、区分程序
int Partition(SqList &L,int low,int high)
{ int i,j; RecordType tmp;
i=low; j=high; tmp=L.r[low];
while(i<j)
{ while(i<j && L.r[j].key>=tmp.key) j–;
if(i<j) { L.r[i]=L.r[j]; i++; }
while(i<j && L.r[i].key< tmp.key) i++;
if(i<j) { L.r[j]=L.r[i]; j–; }
}
L.r[i]=tmp;
return(i);
}
5、分析
时间复杂度? 一般情况为O(nlog2n),拆分过程近似平衡树
最糟情况为O(n2),类似冒泡、沉底
空间复杂度?
栈空间=树的深度。
最好情况:树深度=log2n
最糟情况:树深度=n
稳定排序?不稳定
什么是最糟情况?
已经有序的数组。
例、一组记录的关键值为(4,7,5,2,3,8),进行从小到大的快速排序,以首记录为基准,得到的第一趟排序结果为 。
A、2,3,4,5,7,8 B、3,7,5,2,4,8
C、3,4,5,2,7,8 D、3,2,4,5,7,8
作业:
纸笔调试快速排序。
第三节 选择排序
由来:
“比较”比“赋值”速度快得多
一、直接选择排序
算法:
n-1趟选出n-1个极值,置于相应目标位置。
void SelectSort(SqList &L)
{ int i,j,min_i; RecordType tmp;
for(i=0; i<L.length-1; i++)
{ min_i=i;
for(j=i+1; j<L.length; j++)
if(L.r[j].key<L.r[min_i].key) min_i=j;
if(i!=min_i)
{ tmp=L.r[i]; L.r[i]=L.r[min_i]; L.r[min_i]=tmp; }
}
}
时间复杂度? O(n2)
稳定排序? 不稳定!
例: 3 4 5 3 1 2
1 4 5 3 3 2
二、堆排序
1、由来
1)能不能减少比较次数呢?
2)KMP算法的启发:充分利用前面比较的结果。
3)锦标赛的赛制: 树形选择
选出冠军的过程:
选出亚军的比较次数=树的深度log2n
时间复杂度? O(nlog2n)
空间复杂度? O(n)
2、堆的定义
60 年代Williams首先提出堆排序算法。
有n个记录的序列,其关键值序列为(K0,K1,……Kn-1)
若2i+1<n,则有Ki<=K2i+1
若2i+2<n,则有Ki<=K2i+2
实际上,该序列可视作一棵完全二叉树的顺序存储形式。
堆中:每个分支结点的关键值 <= 其左右孩子结点的关键值
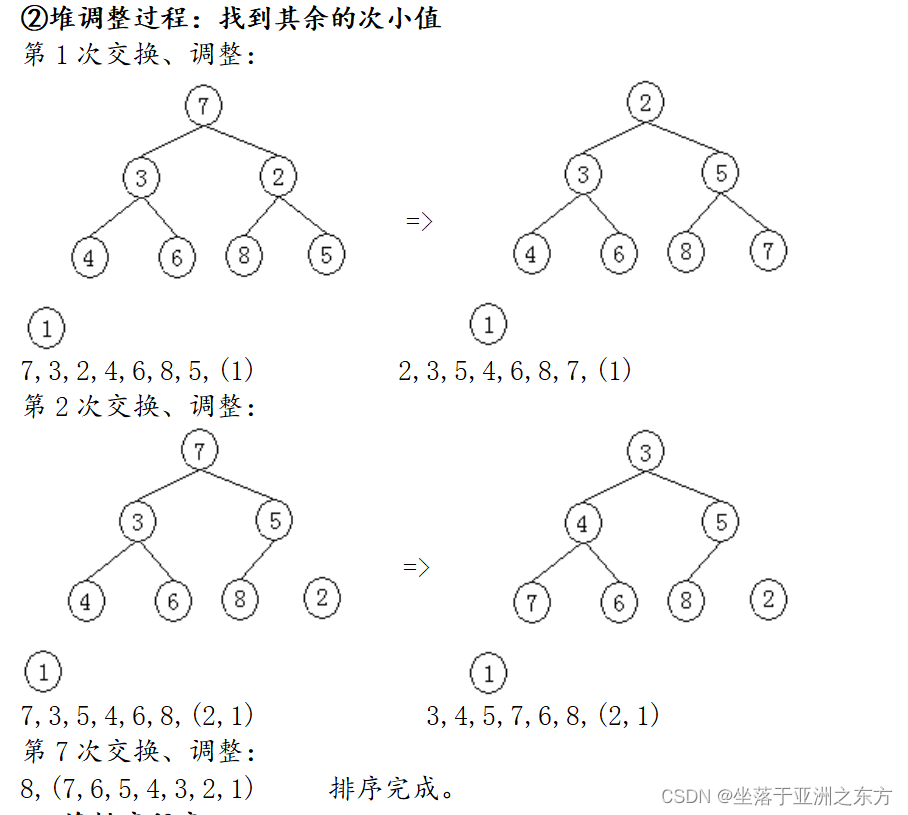
3、堆排序算法
如何建堆?找到最小值?
建堆是一个调整的过程。
从头开始调整?或从尾开始调整?
从简单的事做起!
从最后一个分支结点开始调整!
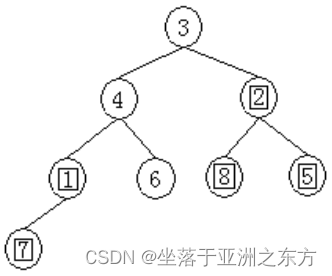
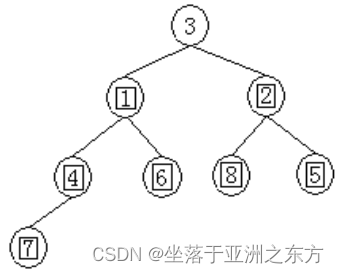
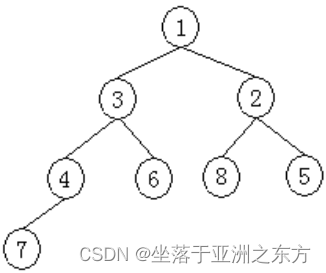
4、示例
原序列:3,4,5,1,6,8,2,7
①建堆过程:
4、堆排序程序
void HeapSort(SqList &L)
{ int i; RecordType tmp;
for(i=L.length/2-1; i>=0; i–)
HeapShift(L,i,L.length-1);
for(i=L.length-1; i>0; i–)
{ tmp=L.r[0]; L.r[0]=L.r[i]; L.r[i]=tmp;
HeapShift(L,0,i-1);
}
}
// 调整范围:L.r[root]……L.r[bottom]
void HeapShift(SqList &L,int root,int bottom)
{ RecordType tmp; int ch_i;
tmp=L.r[root];
ch_i=2root+1;
while(ch_i<=bottom)
{ if(ch_i+1<=bottom && L.r[ch_i].key>L.r[ch_i+1].key)
ch_i++; // ch_i是左右孩子中较小者的下标
if(L.r[ch_i].key>=tmp.key) break;
L.r[root]=L.r[ch_i];
root=ch_i; ch_i=2root+1;
}
L.r[root]=tmp;
}
时间复杂度?
整个算法O(nlog2n),建堆O(n)
空间复杂度? O(1)
稳定排序? 不稳定

原来2个3,谁先谁后?
直观的理由:比赛分组不同,结果有差异。
例:一组记录的关键值为(4,7,5,2,3,8),利用堆排序算法建立的初始堆为 C 。
A、2,4,5,7,3,8 B、4,2,5,7,3,8
C、2,3,5,7,4,8 D、8,3,5,7,4,2
作业:
纸笔调试堆排序。
第四节 归并排序
由来:
1)二个有序序列归并为一个有序序列的速度快。
2)大集合的排序:先对子集排序,再归并。
3)外排序的需要
2路归并、3路归并、多路归并。
一、基本操作:归并二个相邻的有序子表
2路归并:归并二个前后相邻的有序子表。
//将SL.r[L1]…SL.r[H1]与SL.r[H1+1]…SL.r[H2]归并到TL.r[L1]…TL.r[H2]
void Merge(SqList SL,SqList &TL,int L1,int H1,int H2)
{ int i,j,k;
i=L1; j=H1+1; k=L1;
while(i<=H1 && j<=H2)
if(SL.r[i].key<=SL.r[j].key) TL.r[k++]=SL.r[i++];
else TL.r[k++]=SL.r[j++];
while(i<=H1) TL.r[k++]=SL.r[i++];
while(j<=H2) TL.r[k++]=SL.r[j++];
}
二、归并排序的过程
1、初始化时:有序子表长度为1。
2、相邻子表两两归并,有序子表加倍;
3、循环执行2,直至有序子表长度为N。
举例:
原 表:3,2, 5,1, 6,8, 4 子表长度=1
第1趟:2,3, 1,5, 6,8, 4 子表长度=2
第2趟:1,2,3,5, 4,6,8 子表长度=4
第3趟:1,2,3,4,5,6,8 子表长度=7
总趟数?
三、自下向上的思路
一、2路归并排序中的一趟
void Mergepass(SqList SL,SqList &TL,int len)
{ int i;
for(i=0; i<=SL.length-2len; i=i+2len)
Merge(SL,TL,i,i+len-1,i+2*len-1);
if(i+len+1 <= SL.length)
Merge(SL,TL,i,i+len-1,SL.length-1);
else
while(i<SL.length) TL.r[i++]=SL.r[i];
}
二、归并排序主函数
void MergeSort(SqList &L)
{ SqList Temp;
int i,len=1;
while(len<SL.length)
{ Mergepass(L,Temp,len); len=len2;
if(len<SL.length)
{ Mergepass(Temp,L,len); len=len2; }
else
for(i=0;i<L.length;i++) L.r[i]=Temp.r[i];
}
}
时间复杂度? O(nlog2n)
空间复杂度? O(n)
稳定排序? 稳定
作业:
纸笔调试归并排序。
例、下列排序算法中, 是稳定的。
A、冒泡排序 B、快速排序 C、选择排序
D、堆排序 E、插入排序
练习:现有一个顺序表含有10000个记录,其中只有少量记录次序不对,且它们距离正确位置不远;如果以比较和移动次数作为度量,请问采用哪种排序方法较好?为什么?
快速 X
堆 X 跳远了
归并 :空间大, 全部logn趟完成,才算完成
插入: 每趟必须做,只是每趟的工作量小些
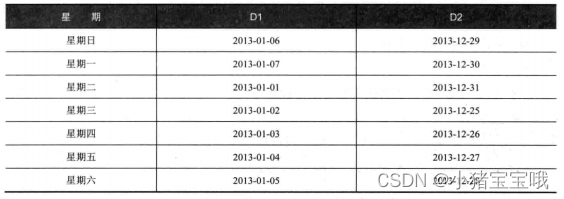
在程序中,可能需要为某些整数定义一个别名,我们可以利用预处理指令#define来完成这项工作,您的代码可能是:
#define MON 1
#define TUE 2
#define WED 3
#define THU 4
#define FRI 5
#define SAT 6
#define SUN 7
在此,我们定义一种新的数据类型,希望它能完成同样的工作。这种新的数据类型叫枚举型。
1. 定义一种新的数据类型 - 枚举型
以下代码定义了这种新的数据类型 - 枚举型
enum DAY
{
MON=1, TUE, WED, THU, FRI, SAT, SUN
};
(1) 枚举型是一个集合,集合中的元素(枚举成员)是一些命名的整型常量,元素之间用逗号,隔开。
(2) DAY是一个标识符,可以看成这个集合的名字,是一个可选项,即是可有可无的项。
(3) 第一个枚举成员的默认值为整型的0,后续枚举成员的值在前一个成员上加1。
(4) 可以人为设定枚举成员的值,从而自定义某个范围内的整数。
(5) 枚举型是预处理指令#define的替代。
(6) 类型定义以分号;结束。
2. 使用枚举类型对变量进行声明
新的数据类型定义完成后,它就可以使用了。我们已经见过最基本的数据类型,如:整型int, 单精度浮点型float, 双精度浮点型double, 字符型char, 短整型short等等。用这些基本数据类型声明变量通常是这样:
char a; //变量a的类型均为字符型char
char letter;
int x,
y,
z; //变量x,y和z的类型均为整型int
int number;
double m, n;
double result; //变量result的类型为双精度浮点型double
既然枚举也是一种数据类型,那么它和基本数据类型一样也可以对变量进行声明。
方法一:枚举类型的定义和变量的声明分开
enum DAY
{
MON=1, TUE, WED, THU, FRI, SAT, SUN
};
enum DAY yesterday;
enum DAY today;
enum DAY tomorrow; //变量tomorrow的类型为枚举型enum DAY
enum DAY good_day, bad_day; //变量good_day和bad_day的类型均为枚举型enum DAY
方法二:类型定义与变量声明同时进行:
enum //跟第一个定义不同的是,此处的标号DAY省略,这是允许的。
{
saturday,
sunday = 0,
monday,
tuesday,
wednesday,
thursday,
friday
} workday; //变量workday的类型为枚举型enum DAY
enum week { Mon=1, Tue, Wed, Thu, Fri Sat, Sun} days; //变量days的类型为枚举型enum week
enum BOOLEAN { false, true } end_flag, match_flag; //定义枚举类型并声明了两个枚举型变量
方法三:用typedef关键字将枚举类型定义成别名,并利用该别名进行变量声明:
typedef enum workday
{
saturday,
sunday = 0,
monday,
tuesday,
wednesday,
thursday,
friday
} workday; //此处的workday为枚举型enum workday的别名
workday today, tomorrow; //变量today和tomorrow的类型为枚举型workday,也即enum workday
enum workday中的workday可以省略:
typedef enum
{
saturday,
sunday = 0,
monday,
tuesday,
wednesday,
thursday,
friday
} workday; //此处的workday为枚举型enum workday的别名
workday today, tomorrow; //变量today和tomorrow的类型为枚举型workday,也即enum workday
也可以用这种方式:
typedef enum workday
{
saturday,
sunday = 0,
monday,
tuesday,
wednesday,
thursday,
friday
};
workday today, tomorrow; //变量today和tomorrow的类型为枚举型workday,也即enum workday
注意:同一个程序中不能定义同名的枚举类型,不同的枚举类型中也不能存在同名的命名常量。错误示例如下所示:
错误声明一:存在同名的枚举类型
typedef enum
{
wednesday,
thursday,
friday
} workday;
typedef enum WEEK
{
saturday,
sunday = 0,
monday,
} workday;
错误声明二:存在同名的枚举成员
typedef enum
{
wednesday,
thursday,
friday
} workday_1;
typedef enum WEEK
{
wednesday,
sunday = 0,
monday,
} workday_2;
3. 使用枚举类型的变量
3.1 对枚举型的变量赋值。
实例将枚举类型的赋值与基本数据类型的赋值进行了对比:
方法一:先声明变量,再对变量赋值
#include<stdio.h>
/* 定义枚举类型 */
enum DAY { MON=1, TUE, WED, THU, FRI, SAT, SUN };
void main()
{
/* 使用基本数据类型声明变量,然后对变量赋值 */
int x, y, z;
x = 10;
y = 20;
z = 30;
/* 使用枚举类型声明变量,再对枚举型变量赋值 */
enum DAY yesterday, today, tomorrow;
yesterday = MON;
today = TUE;
tomorrow = WED;
printf("%d %d %d \n", yesterday, today, tomorrow);
}
方法二:声明变量的同时赋初值
#include <stdio.h>
/* 定义枚举类型 */
enum DAY { MON=1, TUE, WED, THU, FRI, SAT, SUN };
void main()
{
/* 使用基本数据类型声明变量同时对变量赋初值 */
int x=10, y=20, z=30;
/* 使用枚举类型声明变量同时对枚举型变量赋初值 */
enum DAY yesterday = MON,
today = TUE,
tomorrow = WED;
printf("%d %d %d \n", yesterday, today, tomorrow);
}
方法三:定义类型的同时声明变量,然后对变量赋值。
#include <stdio.h>
/* 定义枚举类型,同时声明该类型的三个变量,它们都为全局变量 */
enum DAY { MON=1, TUE, WED, THU, FRI, SAT, SUN } yesterday, today, tomorrow;
/* 定义三个具有基本数据类型的变量,它们都为全局变量 */
int x, y, z;
void main()
{
/* 对基本数据类型的变量赋值 */
x = 10; y = 20; z = 30;
/* 对枚举型的变量赋值 */
yesterday = MON;
today = TUE;
tomorrow = WED;
printf("%d %d %d \n", x, y, z); //输出:10 20 30
printf("%d %d %d \n", yesterday, today, tomorrow); //输出:1 2 3
}
方法四:类型定义,变量声明,赋初值同时进行。
#include <stdio.h>
/* 定义枚举类型,同时声明该类型的三个变量,并赋初值。它们都为全局变量 */
enum DAY
{
MON=1,
TUE,
WED,
THU,
FRI,
SAT,
SUN
}
yesterday = MON, today = TUE, tomorrow = WED;
/* 定义三个具有基本数据类型的变量,并赋初值。它们都为全局变量 */
int x = 10, y = 20, z = 30;
void main()
{
printf(“%d %d %d \n”, x, y, z); //输出:10 20 30
printf(“%d %d %d \n”, yesterday, today, tomorrow); //输出:1 2 3
}
3.2 对枚举型的变量赋整数值时,需要进行类型转换。
#include <stdio.h>
enum DAY { MON=1, TUE, WED, THU, FRI, SAT, SUN };
void main()
{
enum DAY yesterday, today, tomorrow;
yesterday = TUE;
today = (enum DAY) (yesterday + 1); //类型转换
tomorrow = (enum DAY) 30; //类型转换
//tomorrow = 3; //错误
printf("%d %d %d \n", yesterday, today, tomorrow); //输出:2 3 30
}
3.3 使用枚举型变量
#include<stdio.h>
enum
{
BELL = ‘\a’,
BACKSPACE = ‘\b’,
HTAB = ‘\t’,
RETURN = ‘\r’,
NEWLINE = ‘\n’,
VTAB = ‘\v’,
SPACE = ’ ’
};
enum BOOLEAN { FALSE = 0, TRUE } match_flag;
void main()
{
int index = 0;
int count_of_letter = 0;
int count_of_space = 0;
char str[] = "I'm Ely efod";
match_flag = FALSE;
for(; str[index] != '\0'; index++)
if( SPACE != str[index] )
count_of_letter++;
else
{
match_flag = (enum BOOLEAN) 1;
count_of_space++;
}
printf("%s %d times %c", match_flag ? "match" : "not match", count_of_space, NEWLINE);
printf("count of letters: %d %c%c", count_of_letter, NEWLINE, RETURN);
}
输出:
match 2 times
count of letters: 10
Press any key to continue
4. 枚举类型与sizeof运算符
#include <stdio.h>
enum escapes
{
BELL = ‘\a’,
BACKSPACE = ‘\b’,
HTAB = ‘\t’,
RETURN = ‘\r’,
NEWLINE = ‘\n’,
VTAB = ‘\v’,
SPACE = ’ ’
};
enum BOOLEAN { FALSE = 0, TRUE } match_flag;
void main()
{
printf(“%d bytes \n”, sizeof(enum escapes)); //4 bytes
printf(“%d bytes \n”, sizeof(escapes)); //4 bytes
printf("%d bytes \n", sizeof(enum BOOLEAN)); //4 bytes
printf("%d bytes \n", sizeof(BOOLEAN)); //4 bytes
printf("%d bytes \n", sizeof(match_flag)); //4 bytes
printf("%d bytes \n", sizeof(SPACE)); //4 bytes
printf("%d bytes \n", sizeof(NEWLINE)); //4 bytes
printf("%d bytes \n", sizeof(FALSE)); //4 bytes
printf("%d bytes \n", sizeof(0)); //4 bytes
}
5. 综合举例
#include<stdio.h>
enum Season
{
spring, summer=100, fall=96, winter
};
typedef enum
{
Monday, Tuesday, Wednesday, Thursday, Friday, Saturday, Sunday
}
Weekday;
void main()
{
/* Season */
printf(“%d \n”, spring); // 0
printf(“%d, %c \n”, summer, summer); // 100, d
printf(“%d \n”, fall+winter); // 193
Season mySeason=winter;
if(winter==mySeason)
printf("mySeason is winter \n"); // mySeason is winter
int x=100;
if(x==summer)
printf("x is equal to summer\n"); // x is equal to summer
printf("%d bytes\n", sizeof(spring)); // 4 bytes
/* Weekday */
printf("sizeof Weekday is: %d \n", sizeof(Weekday)); //sizeof Weekday is: 4
Weekday today = Saturday;
Weekday tomorrow;
if(today == Monday)
tomorrow = Tuesday;
else
tomorrow = (Weekday) (today + 1); //remember to convert from int to Weekday
}