目录
ADC简介
STM32F10x ADC特点
ADC执行模式
相关寄存器及数据对齐方式
ADC的采样时间
常用库函数
单次转换一般步骤
实验源码
ADC简介
Analog-to-Digital Converter的缩写。指模/数转换器或者模拟/数字转换器。是指将连续变量的模拟信号转换为离散的数字信号的器件。
典型的模拟数字转换器将模拟信号转换为表示一定比例电压值的数字信号。
STM32F10x ADC特点
1.12位逐次逼近型的模拟数字转换器。
2.最多带3个ADC控制器最多支持18个通道,可最多测量16个外部和2个内部信号源。
3.支持单次和连续转换模式。
4.转换结束,注入转换结束,和发生模拟看门狗事件时产生中断。
5.通道0到通道n的自动扫描模式
6.自动校准
7.采样间隔可以按通道编程
8.规则通道和注入通道均有外部触发选项
9.转换结果支持左对齐或右对齐方式存储在16位数据寄存器
10.ADC转换时间:最大转换速率1us.(最大转换速度为1MHz,在ADCCLK=14M,采样周期为1.5个ADC时钟下得到)
11.ADC供电要求: 2.4V-3.6V.
12. ADC输入范围: VREF-S VIN S VREF+ (通常情况下是0到3.3V)
STM32F10x系列芯片ADC通道和引脚对应关系

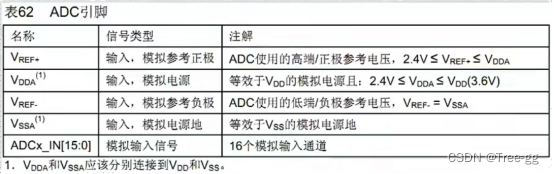
ADC引脚
ADC功能框图
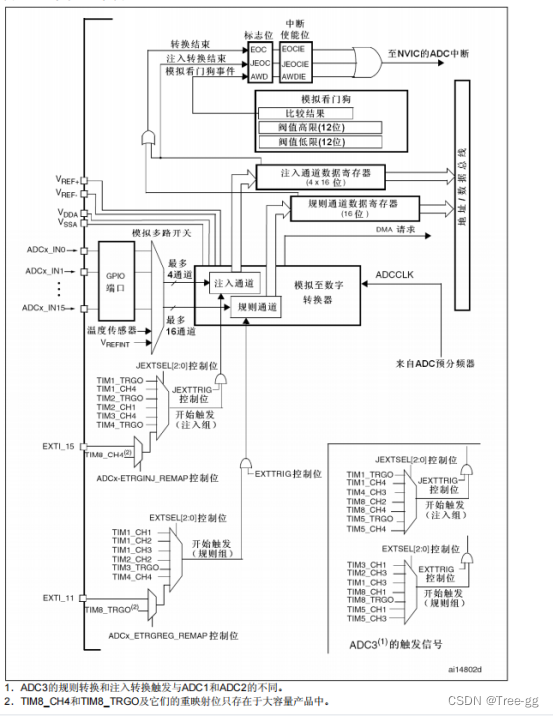

一般情况下VREF-连接到VSSA VREF+连接到VDDA,ADCx_IN0-15就是ADC通道,连接到GPIO,通过一个模拟多路开关,最多4通道连接入注入通道,最多16通道连接到规则通道,规则通道转换的结果保存在规则通道数据寄存器,注入通道数据寄存器转换结果保存到注入通道数据寄存器,注入通道和规则通道如果转换成功后会有一些标志位,如果设置了相应的中断使能位会触发中断。如果要用扫描方式模拟至数字转换器要用DMA,通过DMA直接转换数据,ADCCLK是ADC时钟可以通过相应的寄存器预分频。
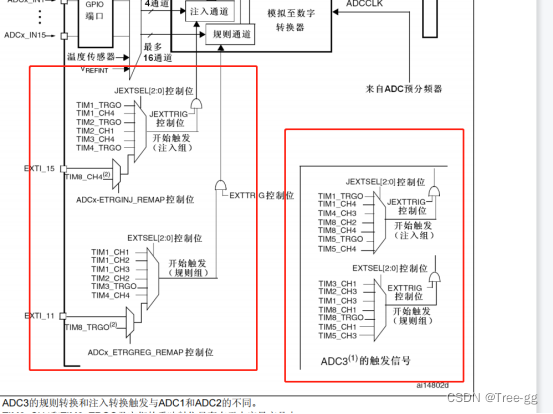
规则通道和注入通道可以通过一些事件来触发转换。
1.规则通道组:相当正常运行的程序。最多16个通道。规则通道和它的转换顺序在ADC_SQRx寄存器中选择,规则组转换的总数应写入ADC SQR1寄存器的L[3:0]中。
2.注入通道组:相当于中断最多4个通道。注入组和它的转换顺序在ADC_JSQR寄存器中选择。注入组里转换的总数应写入ADC_JSQR寄存器的L[1:0]中。

可以理解为规则通道就是按顺序执行转换,注入通道可以理解为是插队,这个是可以设置的,比如设置扫描2个规则通道后在去扫描注入通道,然后在回到规则通道去扫描第三个规则通道。
ADC执行模式
STM32的ADC的各通道可以单次、连续、扫描、或者间断模式执行。
单次转换模式
单次转换模式下,ADC只执行一次转换。该模式既可通过设置ADC_CR2寄存器的ADON位(只适用于规则通道)启动也可通过外部触发启动(适用于规则通道或注入通道),这时CONT位为0。一旦选择通道的转换完成。
如果一个规则通道被转换:
转换数据被储存在16位ADC_DR寄存器中EOC(转换结束)标志被设置如果设置了EOCIE,则产生中断。
如果一个注入通道被转换:
转换数据被储存在16位的ADC_DRJ1寄存器中JEOC(注入转换结束)标志被设置如果设置了JEOCIE位,则产生中断。
连续转换模式
在连续转换模式中,当前面ADC转换一结束马上就启动另一次转换。此模式可通过外部触发启动或通过设置ADC_CR2寄存器上的ADON位启动,此时CONT位是1。每个转换后:
如果一个规则通道被转换:
转换数据被储存在16位的ADC_DR寄存器中EOC(转换结束)标志被设置如果设置了EOCIE,则产生中断。
如果一个注入通道被转换:
转换数据被储存在16位的ADC_DRJ1寄存器中JEOC(注入转换结束)标志被设置如果设置了JEOCIE位,则产生中断。
单次装换和连续转换的区别是:单次转换是不会自动开启下一次转换的需要手动开启,连续装换是当上一次装换完成后会自动开启装换。
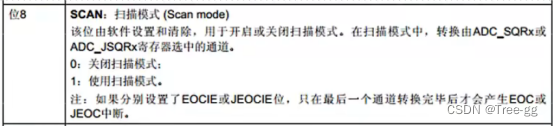
扫描模式
此模式用来扫描一组模拟通道。扫描模式可通过设置ADC_CR1寄存器的SCAN位来选择。一旦这个位被设置,ADC扫描所有被ADC_SQRX寄存器(对规则通道)或ADC_JSQR(对注入通道)选中的所有通道。在每个组的每个通道上执行单次转换。在每个转换结束时,同一组的下一个通道被自动转换。如果设置了CONT位,转换不会在选择组的最后一个通道上停止,而是再次从选择组的第一个通道继续转换。如果设置了DMA位,在每次EOC后,DMA控制器把规则组通道的转换数据传输到SRAM中。而注入通道转换的数据总是存储在ADC_JDRx寄存器中。
ADC中断
规则和注入组转换结束时能产生中断。它们都有独立的中断使能位。ADC1和ADC2的中断映射在同一个中断向量上,而ADC3的中断有自己的中断向量。ADC_SR寄存器中有2个其他标志,但是它们没有相关联的中断:JSTRT(注入组通道转换的启动)STRT(规则组通道转换的启动)

ADC时钟配置
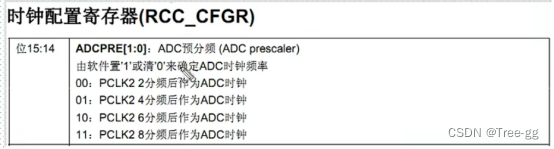
不要让ADC时钟超过14MHz,否则可能不准。
相关寄存器及数据对齐方式
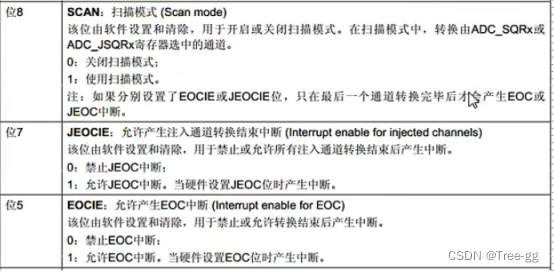
ADC_CR1寄存器
在扫描模式下,由ADC_SQRx或者ADC_JSQRx寄存器选中的通道被转换。如果设置了EOCIE或者JEOCIE,在最后一个通道转换完毕后才会产生EOC或者JEOC中断
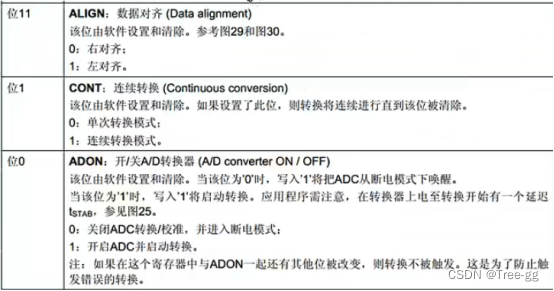
ADC CR2寄存器


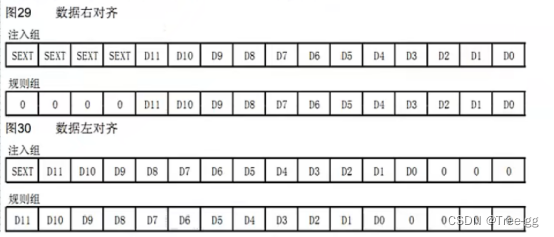
数据对齐方式
ADC_CR2寄存器中的ALIGN位选择转换后数据储存的对齐方式。数据可以左对齐或右对齐,如图29和图30所示。注入组通道转换的数据值已经减去了在ADC_JOFRx寄存器中定义的偏移量,因此结果可以是一个负值。SEXT位是扩展的符号值。对于规则组通道,不需减去偏移值,因此只有12个位有效。
ADC_SMPR1寄存器

ADC_SMPR2寄存器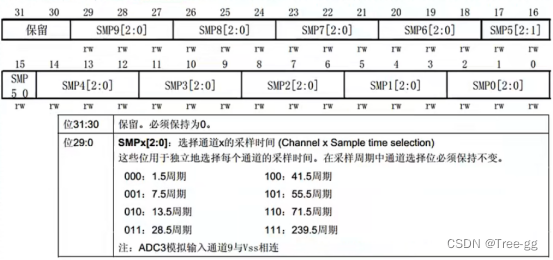
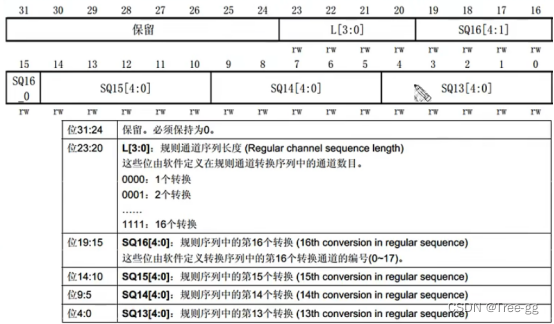
ADC SQR1/SQR2/SQR3规则序列寄存器
ADC JSQR注入序列寄存器
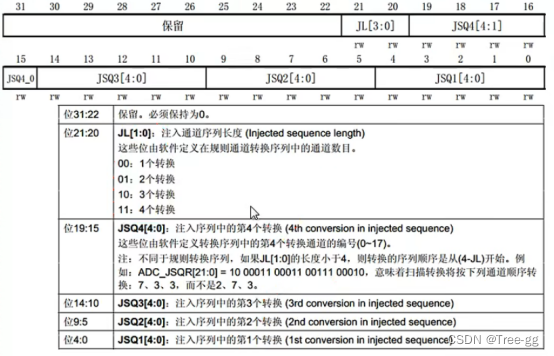
可以理解为这2个寄存器配置的是装换先后顺序,例如第一个装换是规则的几通道还是注入通道的某个通道。
ADC_DR规则通道数据寄存器
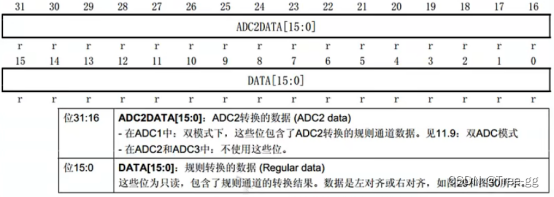
ADC UDR注入通道数据寄存器

这2个寄存器可以理解为装换后数据存的范围是多少。
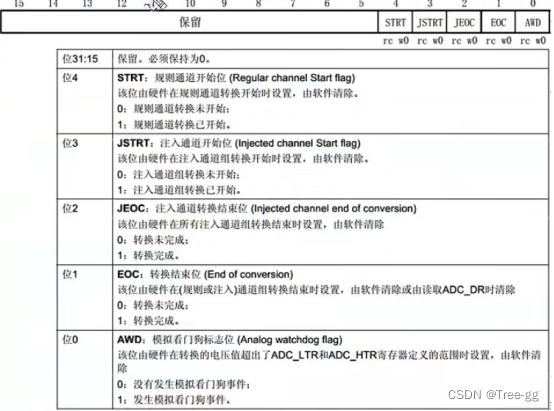
ADC SR状态寄存器
ADC的采样时间
可编程的通道采样时间ADC使用若干个ADC_CLK周期对输入电压采样,采样周期数目可以通过ADC_SMPR1和ADC_SMPR2寄存器中的SMP[2:0]位更改。每个通道可以分别用不同的时间采样。总转换时间如下计算:(注意这里的12.5个周期就是可以理解为装换需要的时间)
![]()

最小装换时间1us(ADC时钟=14MHz,采样周期为1.5周期下得到)
常用库函数
初始化结构体
typedef struct
{
uint32_t ADC_Mode;//ADC模式:配置ADC_CR1寄存器的位[19:16]: DUALMODE[3:0]位
FunctionalState ADC_ScanConvMode; //是否使用扫描模式。 ADC_CR1位8: SCAN位
FunctionalState ADC_ContinuousConvMode; //单次转换OR连续转换: ADC_CR2的位1: CONT
uint32_t ADC_ExternalTrigConv; //触发方式: ADC_CR2的位[19:17]: EXTSEL[2:0]
uint32_t ADC_DataAlign; //对齐方式:左对齐还是右对齐: ADC_CR2的位11: ALIGN
uint8_t ADC_NbrOfChannel;//规则通道序列长度: ADC_SQR1的位[23:20]: L[3:0]
}ADC_InitTypeDef;void ADC_Init(ADC_TypeDef* ADCx, ADC_InitTypeDef* ADC_InitStruct);//ADC初始化函数
void ADC_Delnit(ADC_TypeDef*ADCx);//重设默认值函数
void ADC_Cmd(ADC_TypeDef*ADCx, FunctionalState NewState);//使能函数
void ADC_ITConfig(ADC_TypeDef*ADCx, uint16_t ADC_IT, FunctionalState NewState);//中断配置
void ADC_SoftwareStartConvCmd(ADC_TypeDef* ADCx, FunctionalState NewState);//软件装换
void ADC_RegularChannelConfig(ADC_TypeDef* ADCx, uint8_t ADC_Channel, uint8_t Rank, uint8_t ADC_Sample Time);//配置规则通道
uint16_t ADC_GetConversionValue(ADC_TypeDef* ADCx);//获取装换值
void ADC_ResetCalibration(ADC_TypeDef* ADCx);//使能复位校准
FlagStatus ADC_GetResetCalibrationStatus(ADC_TypeDef* ADCx);//获取使能复位校准状态
void ADC_StartCalfbration(ADC_TypeDef* ADCx);//开启AD校准
FlagStatus ADC_GetCalibrationStatus(ADC_TypeDef* ADCx);//获取AD校准状态单次转换一般步骤:
1.开启PA口时钟和ADC1时钟,设置PA1为模拟输入。
GPIO Init();
APB2PeriphClockCmd();2复位ADC1,同时设置ADC1分频因子。
RCC_ADCCLKConfig(RCC_PCLK2 Div6);
ADC_Delnit(ADC1);3初始化ADC1参数,设置ADC1的工作模式以及规则序列的相关信息。
void ADC_Init(ADC_TypeDef* ADCx, ADC_InitTypeDef*ADC_InitStruct);4使能ADC并校准。
ADC_ Cmd(ADC1, ENABLE);5配置规则通道参数:
ADC_RegularChannelConfig();6开启软件转换:
ADC_SoftwareStartConvCmd(ADC1);7等待转换完成,读取ADC值。
ADC GetConversion Value(ADC1);实验源码:
/**
******************************************************************************
* @file : user_rcc_config.c
* @brief : V1.00
******************************************************************************
* @attention
*
******************************************************************************
*/
/* Include 包含---------------------------------------------------------------*/
#include "user_rcc_config.h"
/* Typedef 类型----------------------------------------------------------------*/
/* Define 定义----------------------------------------------------------------*/
/* Macro 宏------------------------------------------------------------------*/
/* Variables 变量--------------------------------------------------------------*/
/* Constants 常量--------------------------------------------------------------*/
/* Function 函数--------------------------------------------------------------*/
/*!
\brief RCC配置
\param[in] none
\param[out] none
\retval none
*/
void Rcc_config(void)
{
/*使能GPIOA时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
/*使能UART1时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
/*使能ADC1通道时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE );
/*设置ADC分频因子6 72M/6=12,ADC最大时间不能超过14M*/
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
}
/************************************************************** END OF FILE ****/
/**
******************************************************************************
* @file : user_gpio.c
* @brief : V1.00
******************************************************************************
* @attention
*
******************************************************************************
*/
/* Include 包含---------------------------------------------------------------*/
#include "user_gpio.h"
/* Typedef 类型----------------------------------------------------------------*/
/* Define 定义----------------------------------------------------------------*/
/* Macro 宏------------------------------------------------------------------*/
/* Variables 变量--------------------------------------------------------------*/
/* Constants 常量--------------------------------------------------------------*/
/* Function 函数--------------------------------------------------------------*/
/*!
\brief GPIO初始化函数
\param[in] none
\param[out] none
\retval none
*/
void Gpio_Init(void)
{
/*GPIO结构体*/
GPIO_InitTypeDef GPIO_InitTypeDefstruct;
/*UART1发送引脚配置*/
GPIO_InitTypeDefstruct.GPIO_Mode = GPIO_Mode_AF_PP;//推挽复用输出
GPIO_InitTypeDefstruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitTypeDefstruct.GPIO_Speed = GPIO_Speed_10MHz;
/*写入结构体到GPIOA*/
GPIO_Init(GPIOA,&GPIO_InitTypeDefstruct);
/*UART1接收引脚配置*/
GPIO_InitTypeDefstruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_InitTypeDefstruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitTypeDefstruct.GPIO_Speed = GPIO_Speed_10MHz;
/*写入结构体到GPIOA*/
GPIO_Init(GPIOA,&GPIO_InitTypeDefstruct);
/*PA1作为模拟通道输入引脚*/
GPIO_InitTypeDefstruct.GPIO_Pin = GPIO_Pin_1;
GPIO_InitTypeDefstruct.GPIO_Mode = GPIO_Mode_AIN;//模拟输入引脚
GPIO_Init(GPIOA, &GPIO_InitTypeDefstruct);
}
/************************************************************** END OF FILE ****/
/**
******************************************************************************
* @file : user_adc.c
* @brief : V1.00
******************************************************************************
* @attention
*
******************************************************************************
*/
/* Include 包含---------------------------------------------------------------*/
#include "user_adc.h"
/* Typedef 类型----------------------------------------------------------------*/
/* Define 定义----------------------------------------------------------------*/
/* Macro 宏------------------------------------------------------------------*/
/* Variables 变量--------------------------------------------------------------*/
/* Constants 常量--------------------------------------------------------------*/
/* Function 函数--------------------------------------------------------------*/
/*!
\brief ADC初始函数
\param[in] none
\param[in] none
\retval none
*/
void Adc_Init(void)
{
/*ADC结构体*/
ADC_InitTypeDef ADC_InitStructure;
/*复位ADC1*/
ADC_DeInit(ADC1);
/*ADC配置*/
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC1独立模式
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //单通道模式
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //单次转换模式
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //不使用外部触发
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC数据右对齐
ADC_InitStructure.ADC_NbrOfChannel = 1; //顺序进行规则转换的ADC通道的数目
/*写入ADC1里面*/
ADC_Init(ADC1, &ADC_InitStructure);
/*使能ADC1*/
ADC_Cmd(ADC1, ENABLE);
/*使能复位校准*/
ADC_ResetCalibration(ADC1);
/*等待复位校准结束*/
while(ADC_GetResetCalibrationStatus(ADC1));
/*开启AD校准*/
ADC_StartCalibration(ADC1);
/*等待校准结束*/
while(ADC_GetCalibrationStatus(ADC1));
}
/*!
\brief 获取ADC1通道数值函数
\param[in] none
\param[in] none
\retval none
*/
uint16_t Get_Adc(uint8_t Channel)
{
/*ADC1,通道Channel,转换顺序1第一个转换,采样时间239.5个周期*/
ADC_RegularChannelConfig(ADC1, Channel, 1, ADC_SampleTime_239Cycles5 );
/*使能ADC1软件转换*/
ADC_SoftwareStartConvCmd(ADC1,ENABLE);
/*等待转换结束*/
while(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC ) == 0);
/*返回最近一次ADC1转换结果*/
return ADC_GetConversionValue(ADC1);
}
/*!
\brief 获取ADC1转换取平均值
\param[in] none
\param[in] none
\retval none
*/
uint16_t Get_Adc_Average(uint8_t Channel,uint8_t Count)
{
uint32_t val = 0;
uint8_t i;
for(i =0;i<Count;i++)
{
val+=Get_Adc(Channel);
delay_ms(5);
}
return val/Count;
}
/************************************************************** END OF FILE ****/
/**
******************************************************************************
* @file : user_uart.c
* @brief : V1.00
******************************************************************************
* @attention
*
******************************************************************************
*/
/* Include 包含---------------------------------------------------------------*/
#include "user_uart.h"
/* Typedef 类型----------------------------------------------------------------*/
/* Define 定义----------------------------------------------------------------*/
/* Macro 宏------------------------------------------------------------------*/
/* Variables 变量--------------------------------------------------------------*/
extern uint16_t USART_RX_STA;
extern uint8_t USART_RX_BUF[200];
/* Constants 常量--------------------------------------------------------------*/
/* Function 函数--------------------------------------------------------------*/
#if 1
#pragma import(__use_no_semihosting)
/*实现Printf代码*/
struct __FILE
{
int handle;
};
FILE __stdout;
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
/*!
\brief UART1初始化
\param[in] none
\param[out] none
\retval none
*/
void Uart1_Init(u32 bound)
{
/*UART结构体*/
USART_InitTypeDef USART_InitTypeDefstruct;
/*UART结构体配置*/
USART_InitTypeDefstruct.USART_BaudRate = bound; //波特率
USART_InitTypeDefstruct.USART_HardwareFlowControl =USART_HardwareFlowControl_None; //不使用硬件流
USART_InitTypeDefstruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//发送接收使能
USART_InitTypeDefstruct.USART_Parity = USART_Parity_No; //不使用奇偶校验
USART_InitTypeDefstruct.USART_StopBits = USART_StopBits_1; //1个停止位
USART_InitTypeDefstruct.USART_WordLength = USART_WordLength_8b; //8个数据位
/*写入USART1*/
USART_Init(USART1,&USART_InitTypeDefstruct);
/*使能串口1*/
USART_Cmd(USART1,ENABLE);
}
/*!
\brief UART1中断服务函数
\param[in] none
\param[out] none
\retval none
*/
void USART1_IRQHandler(void)
{
}
/************************************************************** END OF FILE ****/
/**
******************************************************************************
* @file : user_mian.h
* @brief : V1.00
******************************************************************************
* @attention
*
******************************************************************************
*/
/* Include 包含---------------------------------------------------------------*/
#include "stm32f10x.h"
#include <stdbool.h>
#include "user_gpio.h"
#include "user_delay.h"
#include "user_rcc_config.h"
#include "user_uart.h"
#include "user_adc.h"
/* Typedef 类型----------------------------------------------------------------*/
/* Define 定义----------------------------------------------------------------*/
/* Macro 宏------------------------------------------------------------------*/
/* Variables 变量--------------------------------------------------------------*/
//最多一次接收200个字节
uint8_t USART_RX_BUF[200];
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
uint16_t USART_RX_STA=0; //接收状态标记
/* Constants 常量--------------------------------------------------------------*/
/* Function 函数--------------------------------------------------------------*/
int main(void)
{
/*ADC装换转换变量*/
uint16_t adc;
/*电压*/
float Voltage;
/*配置系统中断分组为2位抢占2位响应*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/*延时函数初始化*/
delay_init();
/*RCC配置*/
Rcc_config();
/*GPIO初始化*/
Gpio_Init();
/*初始化ADC1*/
Adc_Init();
/*USART1初始化*/
Uart1_Init(9600);
/*死循环*/
while(1){
/*获取ADC1通道110次的平均值*/
adc = Get_Adc_Average(ADC_Channel_1,10);
/*电压是3.3V,12位精度的十进制就是4096,采样数值每一格代表几V电压=3.3/4096*/
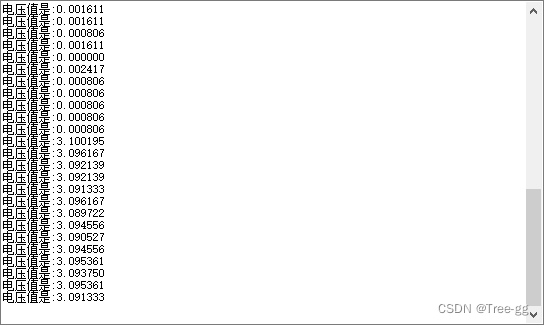
Voltage = adc * (3.3/4096);
printf("电压值是:%f\r\n",Voltage);
delay_ms(1000);
}
}
/************************************************************** END OF FILE ****/







![[附源码]计算机毕业设计拉勾教育课程管理系统Springboot程序](https://img-blog.csdnimg.cn/f858a01550124121ad1c4800309f8f1d.png)