文章目录
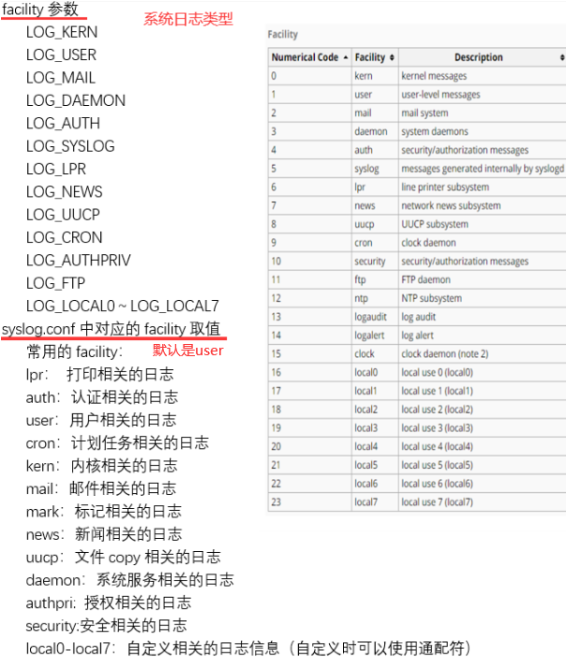
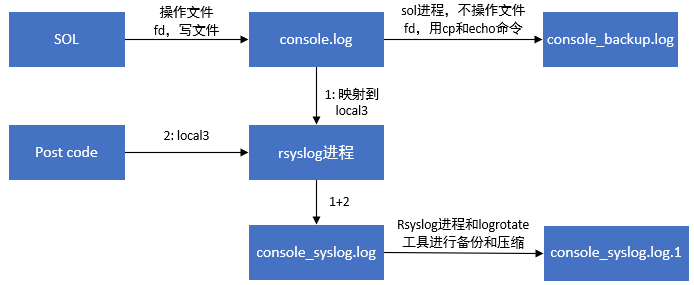
- 1.rsyslog:rsyslogd一个进程 ,管理每个进程发来的log并往/var/log里写,syslog函数将log写给rsyslogd进程,rsyslogd -v
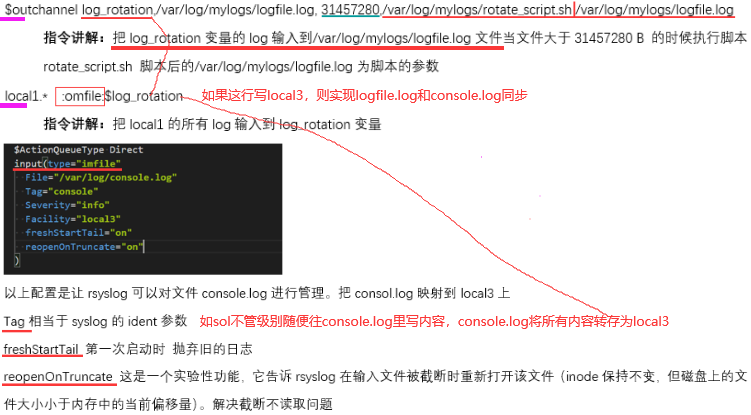
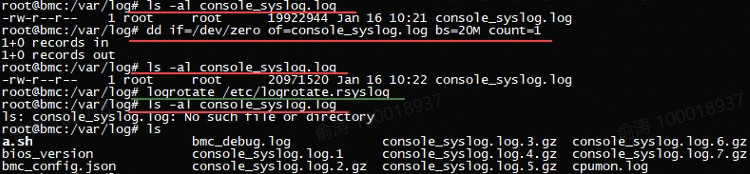
- 2.logrotate:logrotate /etc/logrotate.rsyslog(bb中重命名)
- 3.post_code:即sel的sensor_type
- 4.journalctl:linux内存中日志是二进制无法查看,用journalctl查看
1.rsyslog:rsyslogd一个进程 ,管理每个进程发来的log并往/var/log里写,syslog函数将log写给rsyslogd进程,rsyslogd -v
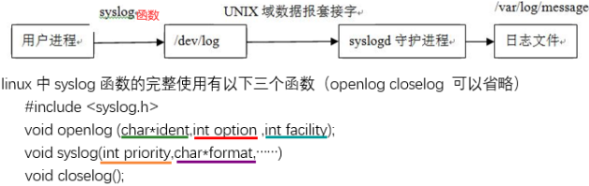
ident将是一个标记,省略的话即打印出进程的名字如下。

grep -v "^#" /etc/rsyslog.conf | grep -v "^$" #排除文件中以#开头和去除空行

// logger命令打印显示: 年...
$template LogUtilFileFormat,"%$year% %timegenerated%.%timegenerated:::date-subseconds% %HOSTNAME% %syslogseverity-text:::uppercase% bmc#%syslogtag%%msg:::sp-if-no-1st-sp%%msg:::drop-last-lf%\n"

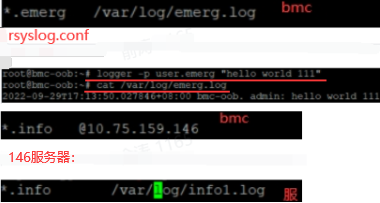
# 如下在37客户端,/etc/rsyslog.conf中,将info级别及其以上级别(可改成crit等其他级别)的日志发送给target服务端
*.info action(type="omfwd" name="remoteLog" template="LogUtilFileFormat" target="10.75.159.146" port="514" protocol="udp"
queue.type="LinkedList" action.resumeRetryCount="1" action.resumeInterval="60"
queue.size="500" queue.workerthreadminimummessages="101" queue.discardseverity="0"
queue.timeoutenqueue="0" queue.timeoutshutdown="10" queue.timeoutactioncompletion="100"
action.reportSuspension="off" action.reportSuspensionContinuation="off")
$IncludeConfig /etc/rsyslog.d/*.conf
# 如下在146服务端,/etc/rsyslog.conf中打开如下配置,tcp打开tcp的配置
module(load="imudp")
input(type="imudp" port="514")
$IncludeConfig /etc/rsyslog.d/*.conf
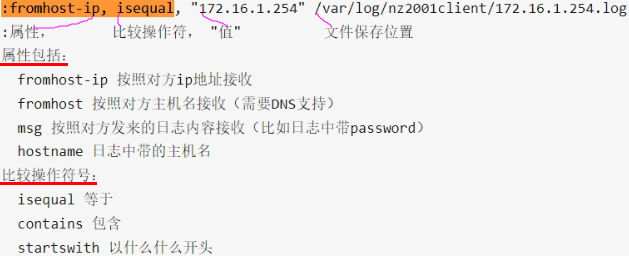
# /etc/rsyslog.d/remote.conf 配置如下(修改完需重启rsyslog进程),sonic将如下直接写在rsyslog.conf:
:fromhost,isequal, "10.75.159.37" /var/log/remote_37.log
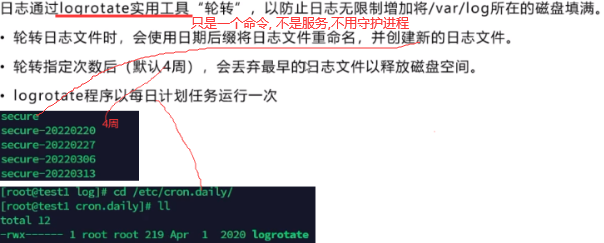
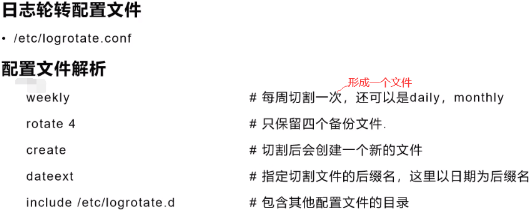
2.logrotate:logrotate /etc/logrotate.rsyslog(bb中重命名)

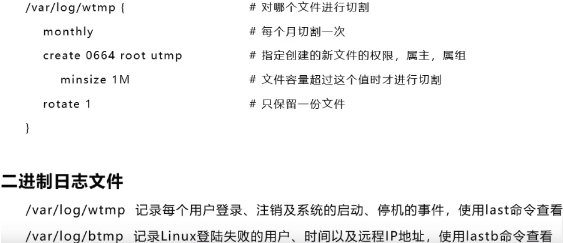
# rsyslog.logrotate
postrotate #脚本只执行一次 开始
/bin/kill -HUP `cat /var/run/rsyslogd.pid 2> /dev/null` 2> /dev/null || true
# HUP/USR1/USR2(挂起信号,重新加载配置文件)
endscript #结束


logrotate是有两种方式做定时任务的,如果使用Crontab模式,则把 /etc/cron.daily/logrotate这个文件里检测/run/systemd/system目录的这3行注释掉就可以;然后停掉logrotate.timer(systemctl stop logrotate.timer)。
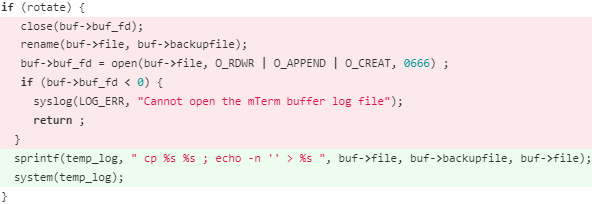
如下20 * 1024 * 1024 = 20971520。

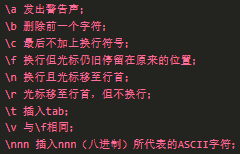
如下不换行输出。
如下处理特殊字符。

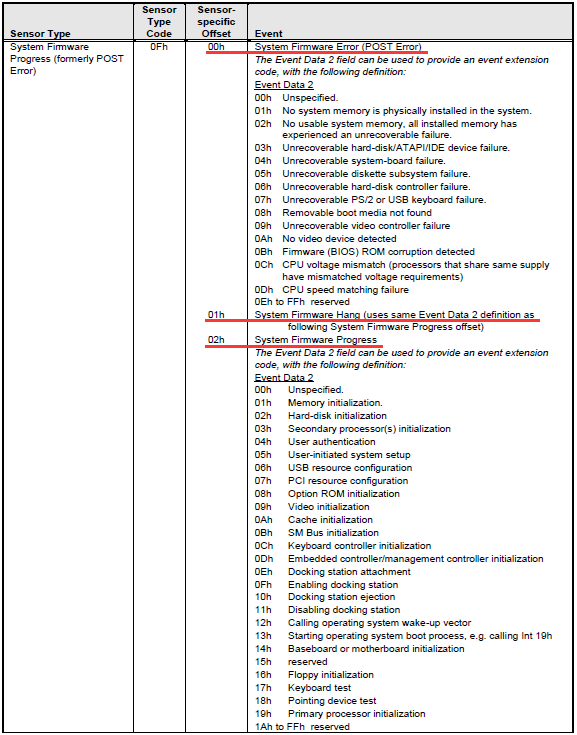
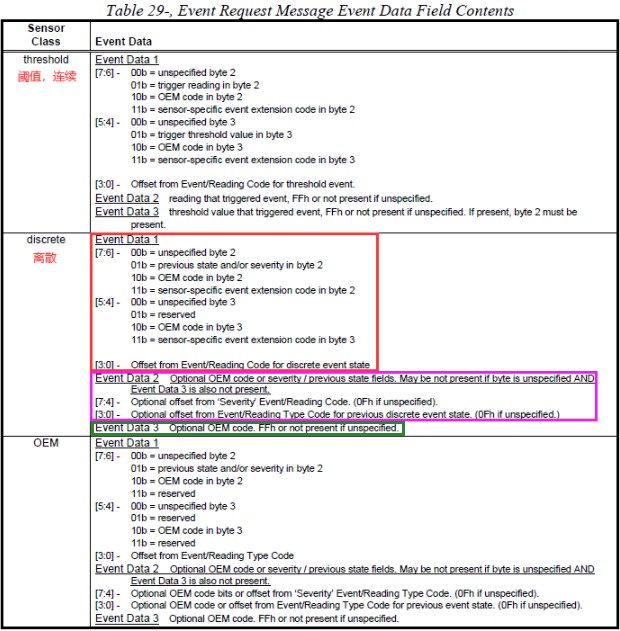
3.post_code:即sel的sensor_type
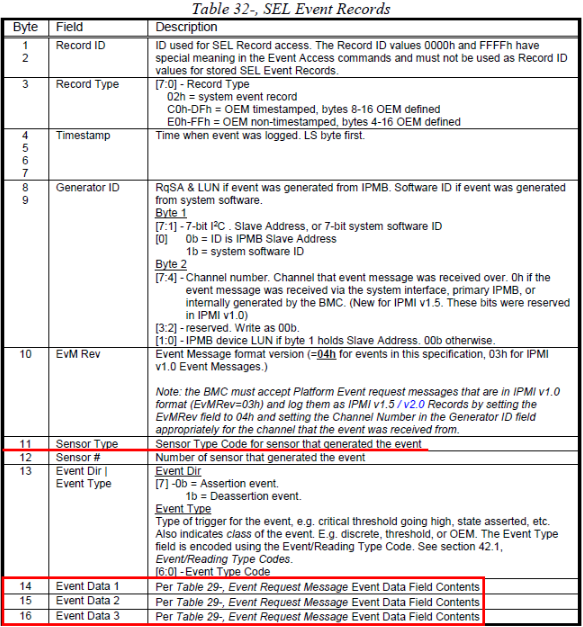
如下Sensor-specific offset一列对应event data 1,Event一列对应event data 2。
// obmc-pal.c
struct system_fw_progress {
uint8_t EventData1; // 8bit,1字节
char DecodeString[128];
};
struct system_fw_progress system_fw_error[] = {
{0x00, "Unspecified"}, // 一个{}就是一个system_fw_progress结构体,129字节
{0x01, "No system memory is physically installed in the system"},
{0x02, "No usable system memory, all installed memory has experienced an unrecoverable failure"}, // 88字节
{0x03, "Unrecoverable hard-disk/ATAPI/IDE device failure"},
{0x04, "Unrecoverable system-board failure"},
{0x05, "Unrecoverable diskette subsystem failure"},
{0x06, "Unrecoverable hard-disk controller failure"},
{0x07, "Unrecoverable PS/2 or USB keyboard failure"},
{0x08, "Removable boot media not found"},
{0x09, "Unrecoverable video controller failure"},
{0x0A, "No video device detected"},
{0x0B, "Firmware (BIOS) ROM corruption detected"},
{0x0C, "CPU voltage mismatch"},
{0x0D, "CPU speed matching failure"},
};
struct system_fw_progress system_fw_hang_or_progress[] = {
{0x00, "Unspecified"},
{0x01, "Memory initialization"},
{0x02, "Hard-disk initialization"},
{0x03, "Secondary processor(s) initialization"},
{0x04, "User authentication"},
{0x05, "User-initiated system setup"},
{0x06, "USB resource configuration"},
{0x07, "PCI resource configuration"},
{0x08, "Option ROM initialization"},
{0x09, "Video initialization"},
{0x0A, "Cache initialization"},
{0x0B, "SM Bus initialization"},
{0x0C, "Keyboard controller initialization"},
{0x0D, "Embedded controller/management controller initialization"},
{0x0E, "Docking station attachment"},
{0x0F, "Enabling docking station"},
{0x10, "Docking station ejection"},
{0x11, "Disabling docking station"},
{0x12, "Calling operating system wake-up vector"},
{0x13, "Starting operating system boot process, e.g. calling Int 19h"},
{0x14, "Baseboard or motherboard initialization"},
{0x15, "reserved"},
{0x16, "Floppy initialization"},
{0x17, "Keyboard test"},
{0x18, "Pointing device test"},
{0x19, "Primary processor initialization"},
};
uint8_t *ed = &event_data[3];
char temp_log[512] = {0};
char add_sol_log_com[512] = "logger -p local3.info ";
case POST_ERROR:
if (((ed[0] >> 6) & 0x03) == 0x3) { // table29 eventdata1第6和7位为11
switch (ed[0] & 0xF) { // table29取eventdata1低四位 去匹配即=Sensor-specific offset这一列
case 0x00:
strcat(error_log, "System Firmware Error (POST Error), IPMI Post Code"); // 50字节
if (ed[1] < (sizeof(system_fw_error) / sizeof(system_fw_error[0]))) { // 13*129/129=0x0d
sprintf(temp_log, ", %s", system_fw_error[ed[1]].DecodeString); // 88字节,ed[1]即eventdata2
} else {
sprintf(temp_log, ", reserved");
}
break;
case 0x01:
strcat(error_log, "System Firmware Hang, IPMI Post Code");
case 0x02:
if (strcmp(error_log, "") == 0) {
strcat(error_log, "System Firmware Progress, IPMI Post Code");
}
if (ed[1] < (sizeof(system_fw_hang_or_progress) / sizeof(system_fw_hang_or_progress[0]))) {
sprintf(temp_log, ", %s", system_fw_hang_or_progress[ed[1]].DecodeString);
} else {
sprintf(temp_log, ", reserved");
}
break;
default:
sprintf(temp_log, "Unknown");
break;
}
strcat(error_log, temp_log); //138
// send post code sel to sol log
sprintf(temp_log, " '%s' ", error_log);
strcat(add_sol_log_com, temp_log);
system(add_sol_log_com);
break;
4.journalctl:linux内存中日志是二进制无法查看,用journalctl查看



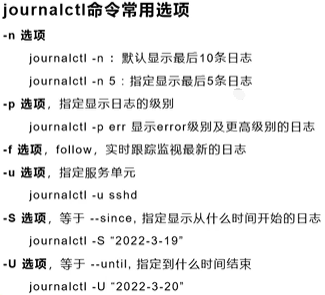
journalctl -t obmc-console-server -f &
journalctl -o verbose -f








![MySQL 主从复制[异步 同步 半同步复制] 读写分离 优化 (非常重要)](https://img-blog.csdnimg.cn/c4ec3cf08efe4ad2a59d07ab1a5ba00d.png)