声明:本人跟随b站江科大学习,本文章是观看完视频后的一些个人总结和经验分享,也同时为了方便日后的复习,如果有错误请各位大佬指出,如果对你有帮助可以点个赞小小鼓励一下,本文章建议配合原视频使用❤️
如果你也正在学习STM32可以订阅本专栏,后续将不定期更新( ˘ ³˘)❤️
如有侵权,请私信联系删除

文章目录
- 前言
- 理论部分
- 有关IIC理论部分
- MPU6050
- 参数和简介
- 硬件电路
- 内部框图
- IIC通讯外设
- IIC外设简介
- IIC框图
- IIC基本结构(一主多从)
- 时序---主机发送
- 时序---主机接受
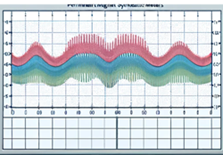
- 软件和硬件的波形对比(上为软件,下为硬件)
- 代码部分
- 软件模拟iic
- 硬件模拟iic
前言
- 弄清IIC时序结构以及硬件要求
- MPU6050的基本参数和大概使用方法
- 一般情况下软件实现iic比硬件更为常用,但是硬件也有其优势,比如:可节省软件资源,可实现完整的多主机通讯模型,时序波形规整,通讯速率快,一般用于对性能指标要求高,软件iic则更为灵活,比如iic总线理论上可无限开辟,而硬件iic外设有限
理论部分
有关IIC理论部分
有关iic的理论知识可以看一下我的这篇文章iic的时序结构,就不做多余赘述了,个人觉得up在32里面讲iic比51清楚,有兴趣的小伙伴还是建议看一下32的iic原视频
MPU6050
参数和简介
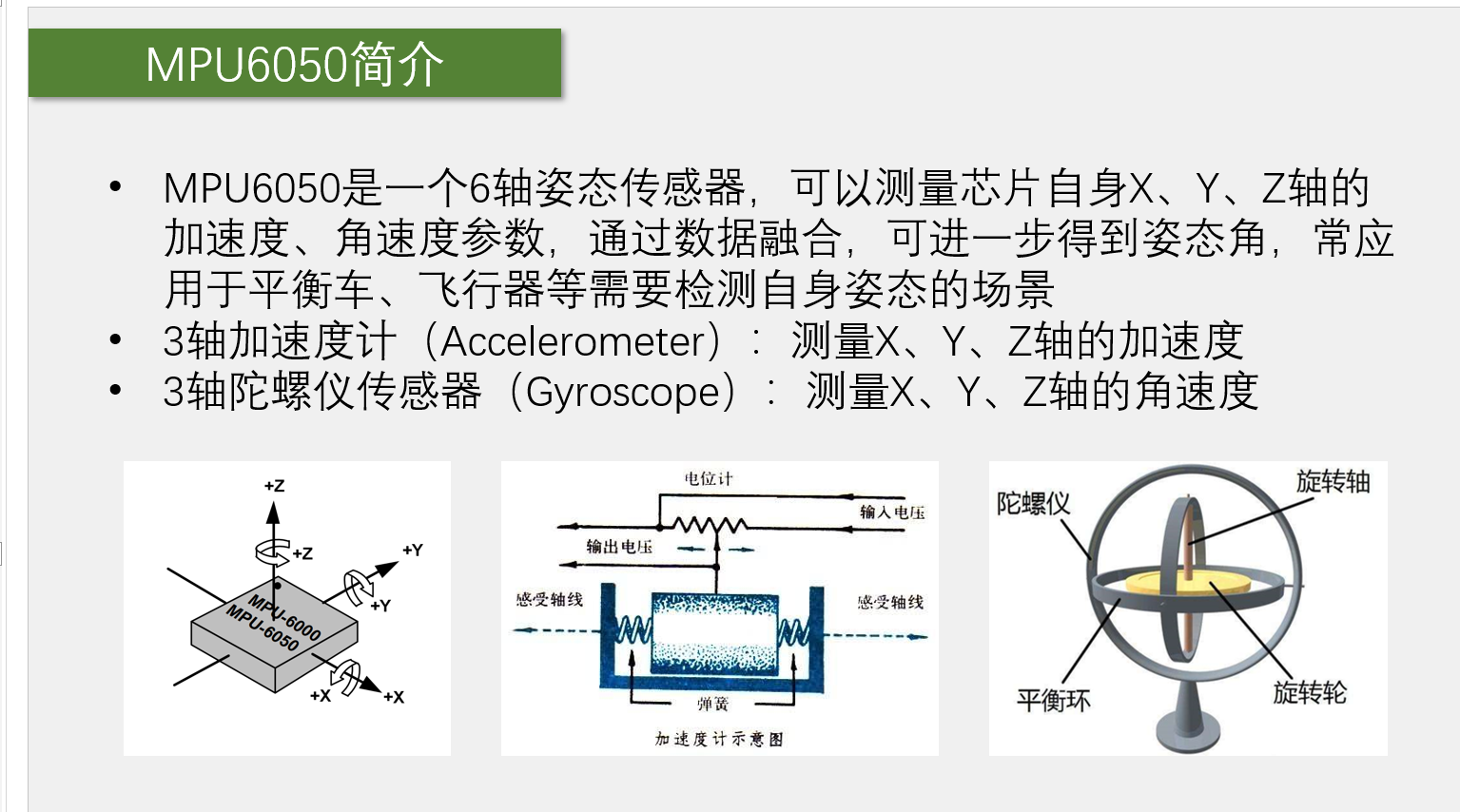
- 理论上陀螺仪传感器是可以直接测量处具体角度的,但这里只能测量出角加速度,最后的角度的话需要另外计算,比如对角速度积分
加速度计具有静态稳定性,不具有动态稳定性,内部工作原理其实就是F=ma,m在里面为一个已知小球重量,用类似于弹簧测力计的东西测量出小球对一个面的压力,用压力除以m,就是该面方向上的加速度陀螺仪计具有动态稳定性,不具有静态稳定性,因为静止时角速度值会因为噪声而无法完全归零,经过积分的不断累积,这个小噪声就会导致积分会产生一个角度的缓慢漂移,最后就不准确
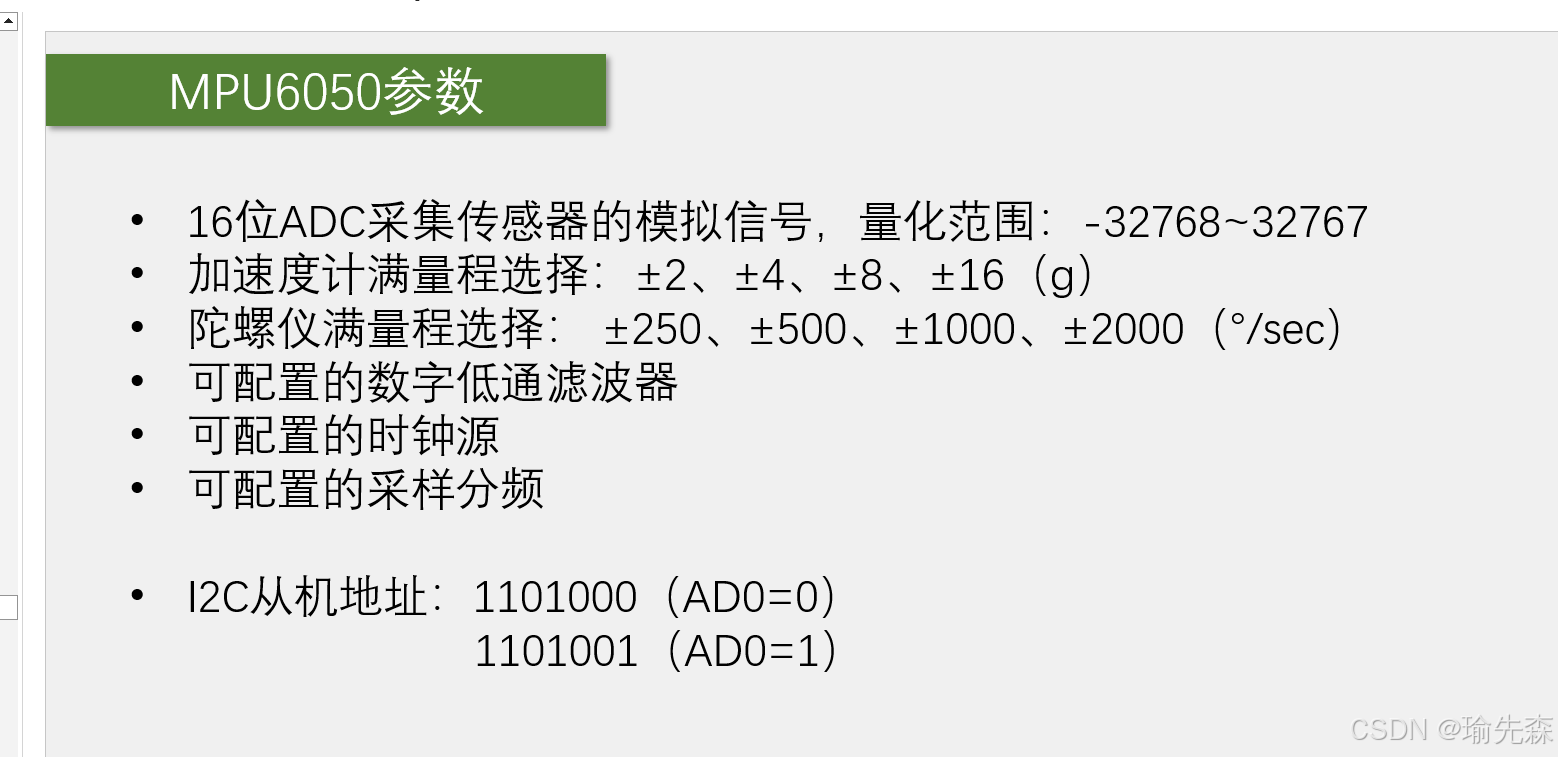
- 16位的ADC就是2^16=65536,但是由于加速度计和陀螺仪计都是存在方向的,所以就平分65536,一半为正值,一半为负值
- 不同量程的选择,测量范围也会变化,量程越大测量范围越大,但是分辨率会变低
- 从机地址有两种表示方法,一种是将7位作为从机地址,那么110 1000就是0x68,那么要加上读写位就是0x68 | 读写位,也可以表示为11010000,那么就是加上读写位表示从机地址,也就是0xD0,那么0xD0就是写地址,0xD1就是读地址
硬件电路
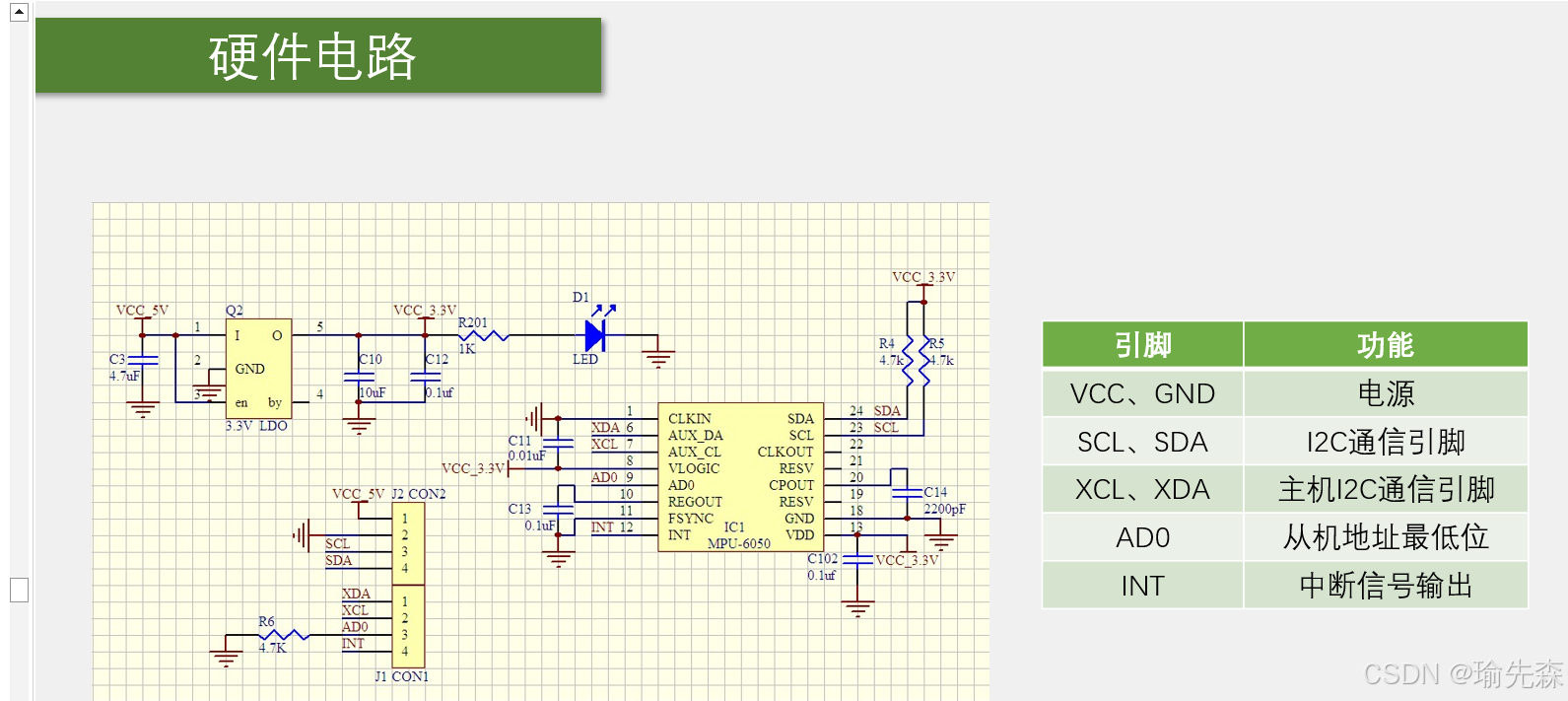
- XCL和XDA用于扩展设备,例如气压计等等
- AD0用于配置从机地址最低位,也就是第8位,默认是0
- 若使用中断,则中断可引起INT电平跳变
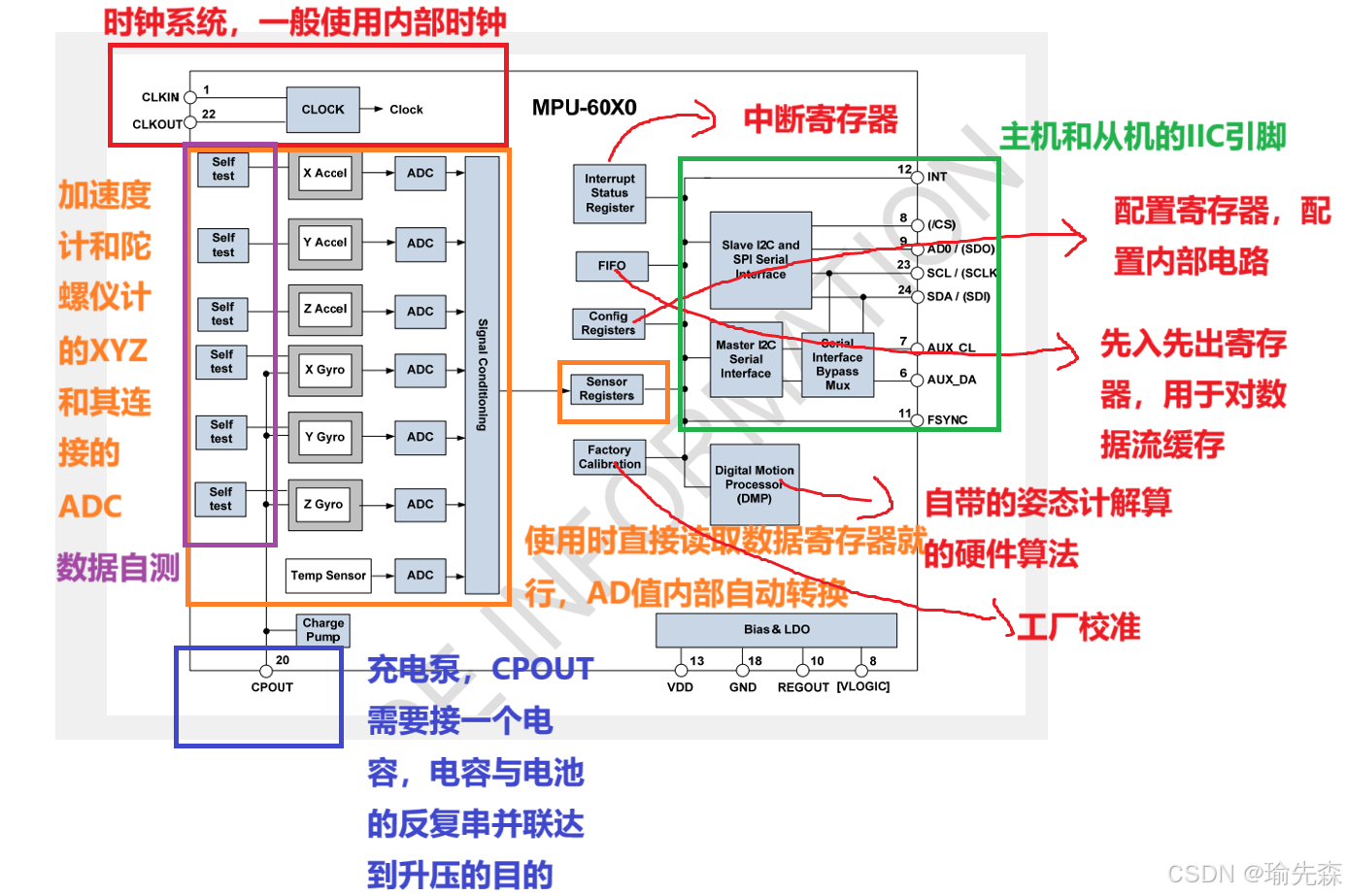
内部框图
IIC通讯外设
IIC外设简介
- 10位地址模式:也就是前五位必须是11110作为10位寻址标志位,然后第一个字节有7个地址位和一位读写位,第二个字节有8个地址位,那么第一个字节的7个地址位中的前五位为标志位,后两位和第二个字节的8位为地址位,总共10位就是1024种情况
- SMBus是系统管理总线,主要用于电源管理系统,了解即可
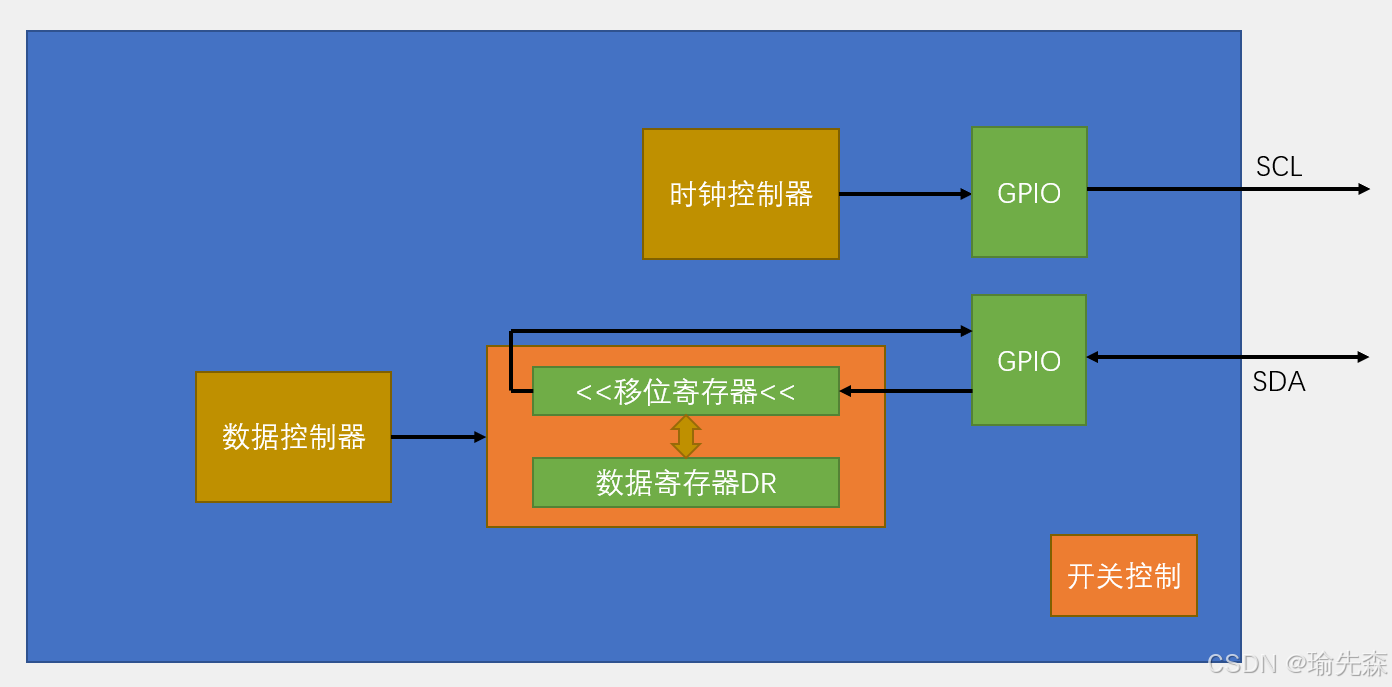
IIC框图

主要分为SDA和SCL两个部分,SDA主要与DR和数据移位寄存器有关,其过程类似于串口,SCL主要和CCR,CR,SR有关,其余部分了解即可
IIC基本结构(一主多从)
- 由于高位先行,所以移位寄存器是向左移位,主要通讯过程还是看移位寄存器和DR的配合,一个SCL时钟移位一次,移位8次可将一个字节放在SDA线上,大概流程就是,先将数据写入DR,当移位寄存器是空的时候,就转到移位寄存器然后发送
(对应后面时序的数据寄存器空和移位寄存器空) - GPIO口都要配置成复用开漏输出模式,因为使用的是片上外设
时序—主机发送
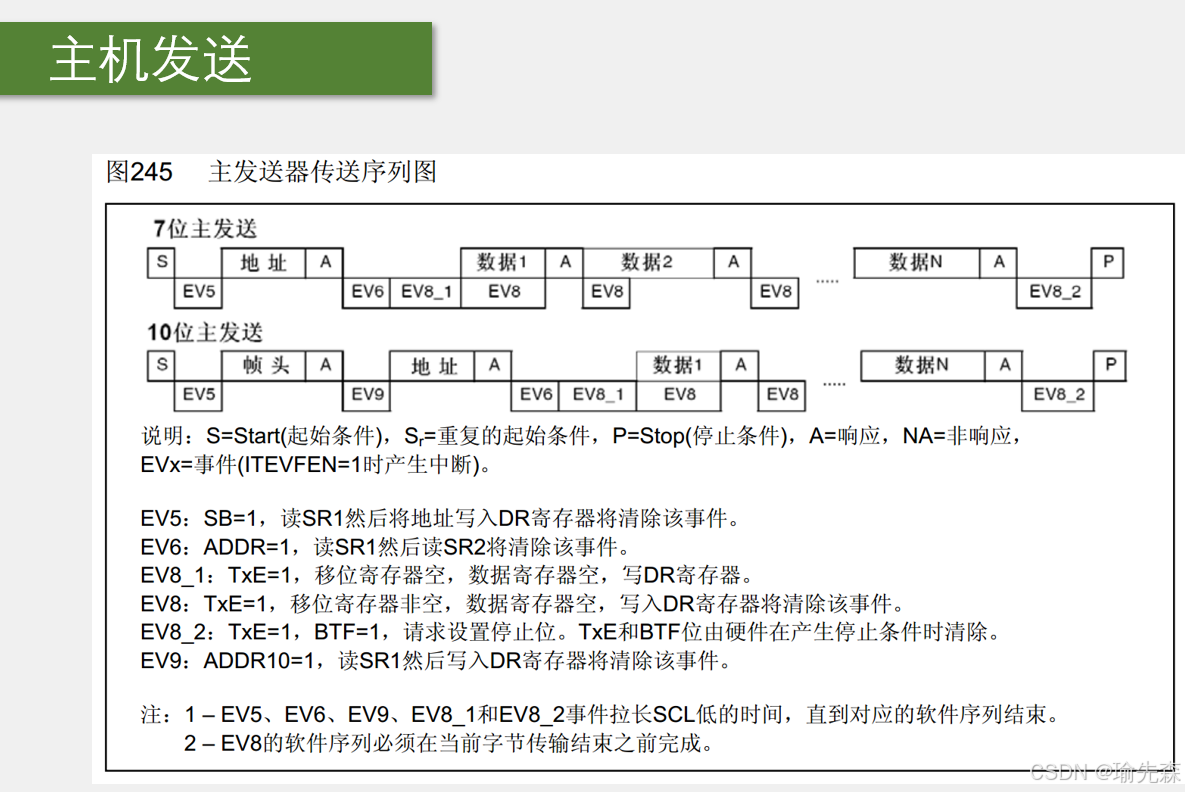
- EVx(Event x)即事件x,使用事件来表示相当于一个大的标志位包含多个小标志位,有专门的函数来读取这个大标志位,也就是配置CR会产生多个不同标志位组合形成了EVx这个大标志位
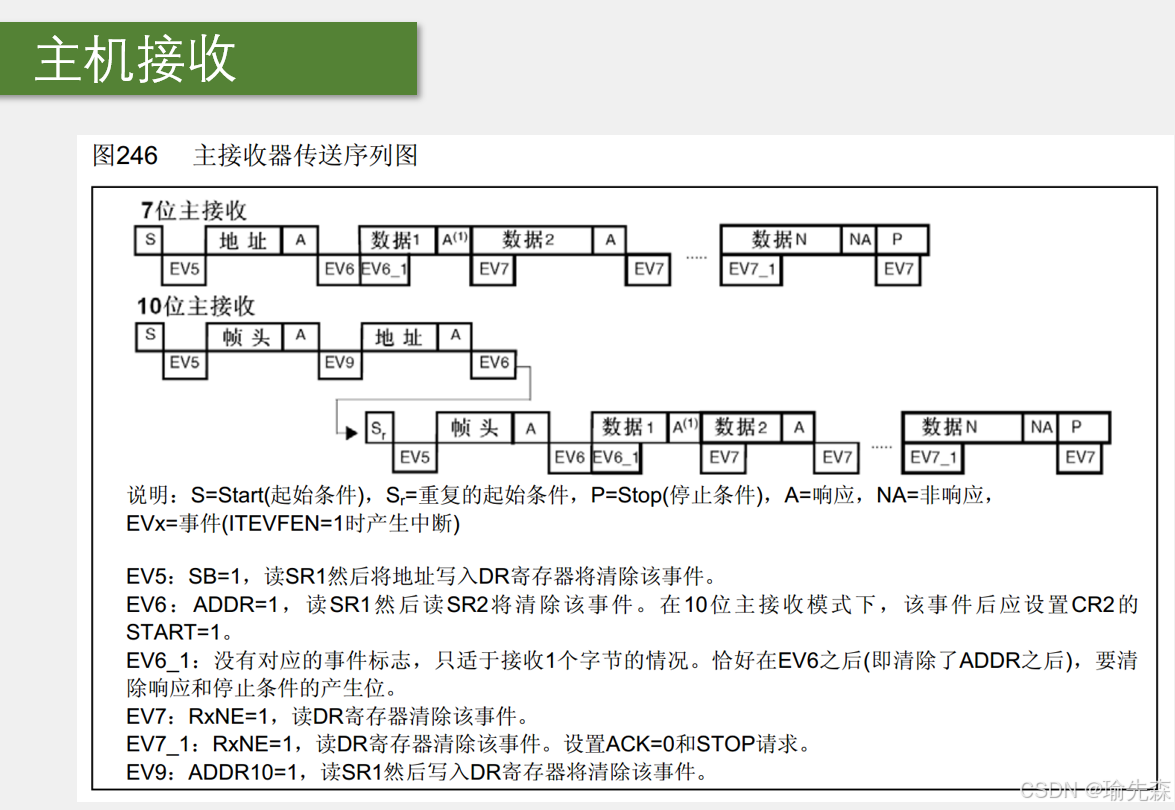
时序—主机接受
软件和硬件的波形对比(上为软件,下为硬件)
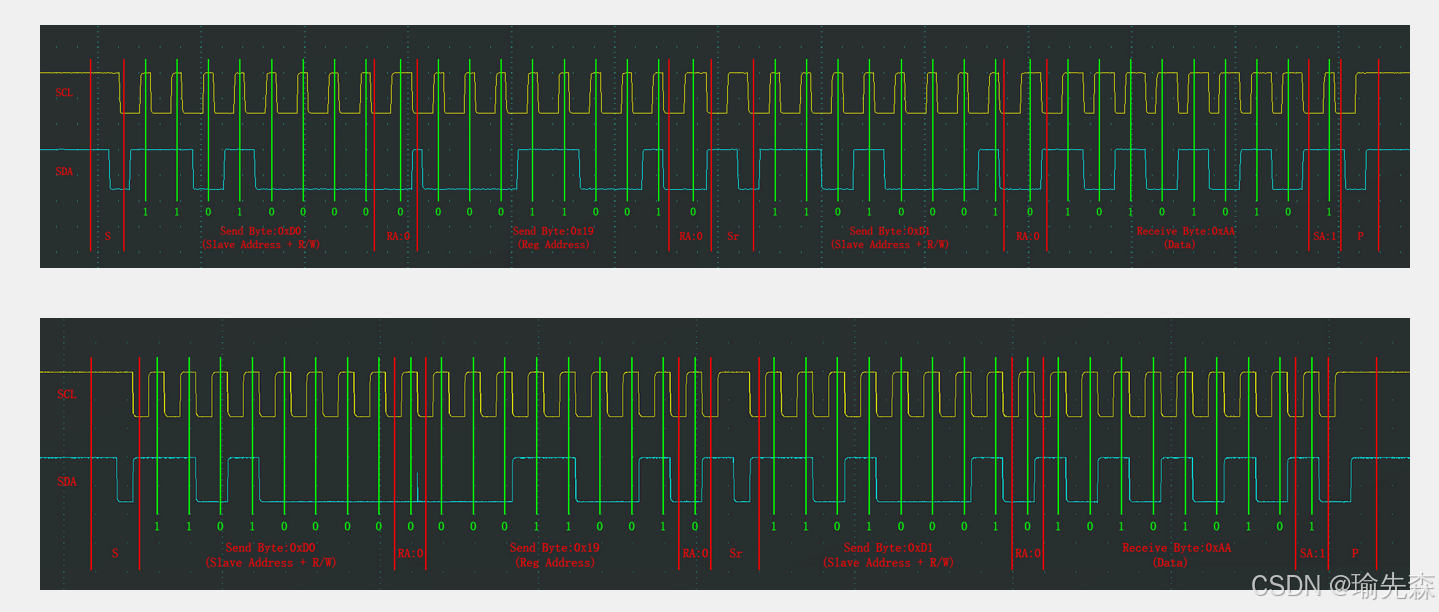
大概的区别:
- 软件波形不规整,SCL高电平占空比不一致,硬件则十分规整
- 软件中SDA在SCL拉低SCL变换数据时存在较大延时,硬件则延时很小,基本上在SCL拉低的瞬间就立马变换SDA
- 图中RA应答结束时,硬件产生了一个小尖峰,而软件则产生一个峰值延迟,这是在RA结束时,从机立马就释放了SDA将SDA操纵权归还主机,让主机准备发送下一个数据0,但是这里软件主机延迟了一会才拉低SDA,将0放在SDA线上,硬件则是主机立马就拉低SDA,所以没有产生那个峰值延迟而是产生一个尖峰
代码部分

软件模拟iic
软件模拟说明白了就是实现代码模拟时序结构,达到发送字节的效果,和以前51里面的写法基本相同
MyI2C.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
/*引脚配置层*/
/**
* 函 数:I2C写SCL引脚电平
* 参 数:BitValue 协议层传入的当前需要写入SCL的电平,范围0~1
* 返 回 值:无
* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SCL为低电平,当BitValue为1时,需要置SCL为高电平
*/
void MyI2C_W_SCL(uint8_t BitValue)
{
GPIO_WriteBit(GPIOB, GPIO_Pin_10, (BitAction)BitValue); //根据BitValue,设置SCL引脚的电平
Delay_us(10); //延时10us,防止时序频率超过要求
}
/**
* 函 数:I2C写SDA引脚电平
* 参 数:BitValue 协议层传入的当前需要写入SDA的电平,范围0~1
* 返 回 值:无
* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SDA为低电平,当BitValue为1时,需要置SDA为高电平
*/
void MyI2C_W_SDA(uint8_t BitValue)
{
GPIO_WriteBit(GPIOB, GPIO_Pin_11, (BitAction)BitValue); //根据BitValue,设置SDA引脚的电平,BitValue要实现非0即1的特性
Delay_us(10); //延时10us,防止时序频率超过要求
}
/**
* 函 数:I2C读SDA引脚电平
* 参 数:无
* 返 回 值:协议层需要得到的当前SDA的电平,范围0~1
* 注意事项:此函数需要用户实现内容,当前SDA为低电平时,返回0,当前SDA为高电平时,返回1
*/
uint8_t MyI2C_R_SDA(void)
{
uint8_t BitValue;
BitValue = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11); //读取SDA电平
Delay_us(10); //延时10us,防止时序频率超过要求
return BitValue; //返回SDA电平
}
/**
* 函 数:I2C初始化
* 参 数:无
* 返 回 值:无
* 注意事项:此函数需要用户实现内容,实现SCL和SDA引脚的初始化
*/
void MyI2C_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB10和PB11引脚初始化为开漏输出
/*设置默认电平*/
GPIO_SetBits(GPIOB, GPIO_Pin_10 | GPIO_Pin_11); //设置PB10和PB11引脚初始化后默认为高电平(释放总线状态)
}
/*协议层*/
/**
* 函 数:I2C起始
* 参 数:无
* 返 回 值:无
*/
void MyI2C_Start(void)
{
MyI2C_W_SDA(1); //释放SDA,确保SDA为高电平
//其实先释放SCL也可以,但是若SCL还被未释放在高电平时,
//此时SDA被释放,根据停止的时序结构就会产生一个停止信号
MyI2C_W_SCL(1); //释放SCL,确保SCL为高电平
MyI2C_W_SDA(0); //在SCL高电平期间,拉低SDA,产生起始信号
MyI2C_W_SCL(0); //起始后把SCL也拉低,即为了占用总线,也为了方便总线时序的拼接
}
/**
* 函 数:I2C终止
* 参 数:无
* 返 回 值:无
*/
void MyI2C_Stop(void)
{
MyI2C_W_SDA(0); //拉低SDA,确保SDA为低电平
MyI2C_W_SCL(1); //释放SCL,使SCL呈现高电平
MyI2C_W_SDA(1); //在SCL高电平期间,释放SDA,产生终止信号
}
/**
* 函 数:I2C发送一个字节
* 参 数:Byte 要发送的一个字节数据,范围:0x00~0xFF
* 返 回 值:无
*/
void MyI2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i ++) //循环8次,主机依次发送数据的每一位
{
/*两个!可以对数据进行两次逻辑取反,作用是把非0值统一转换为1,即:!!(0) = 0,!!(非0) = 1*/
MyI2C_W_SDA(!!(Byte & (0x80 >> i)));//使用掩码的方式取出Byte的指定一位数据并写入到SDA线
MyI2C_W_SCL(1); //释放SCL,从机在SCL高电平期间读取SDA
MyI2C_W_SCL(0); //拉低SCL,主机开始发送下一位数据
}
}
/**
* 函 数:I2C接收一个字节
* 参 数:无
* 返 回 值:接收到的一个字节数据,范围:0x00~0xFF
*/
uint8_t MyI2C_ReceiveByte(void)
{
uint8_t i, Byte = 0x00; //定义接收的数据,并赋初值0x00,此处必须赋初值0x00,后面会用到
MyI2C_W_SDA(1); //接收前,主机先确保释放SDA,避免干扰从机的数据发送
for (i = 0; i < 8; i ++) //循环8次,主机依次接收数据的每一位
{
MyI2C_W_SCL(1); //释放SCL,主机机在SCL高电平期间读取SDA
if (MyI2C_R_SDA()){Byte |= (0x80 >> i);} //读取SDA数据,并存储到Byte变量
//当SDA为1时,置变量指定位为1,当SDA为0时,不做处理,指定位为默认的初值0
MyI2C_W_SCL(0); //拉低SCL,从机在SCL低电平期间写入SDA
}
return Byte; //返回接收到的一个字节数据
}
/**
* 函 数:I2C发送应答位
* 参 数:Byte 要发送的应答位,范围:0~1,0表示应答,1表示非应答
* 返 回 值:无
*/
void MyI2C_SendAck(uint8_t AckBit)
{
MyI2C_W_SDA(AckBit); //主机把应答位数据放到SDA线
MyI2C_W_SCL(1); //释放SCL,从机在SCL高电平期间,读取应答位
MyI2C_W_SCL(0); //拉低SCL,开始下一个时序模块
}
/**
* 函 数:I2C接收应答位
* 参 数:无
* 返 回 值:接收到的应答位,范围:0~1,0表示应答,1表示非应答
*/
uint8_t MyI2C_ReceiveAck(void)
{
uint8_t AckBit; //定义应答位变量
MyI2C_W_SDA(1); //接收前,主机先确保释放SDA,避免干扰从机的数据发送
MyI2C_W_SCL(1); //释放SCL,主机机在SCL高电平期间读取SDA
AckBit = MyI2C_R_SDA(); //将应答位存储到变量里
MyI2C_W_SCL(0); //拉低SCL,开始下一个时序模块
return AckBit; //返回定义应答位变量
}
MyI2C.h
#ifndef __MYI2C_H
#define __MYI2C_H
void MyI2C_Init(void);
void MyI2C_Start(void);
void MyI2C_Stop(void);
void MyI2C_SendByte(uint8_t Byte);
uint8_t MyI2C_ReceiveByte(void);
void MyI2C_SendAck(uint8_t AckBit);
uint8_t MyI2C_ReceiveAck(void);
#endif
MPU6050.c
#include "stm32f10x.h" // Device header
#include "MyI2C.h"
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0 //MPU6050的I2C从机地址
/**
* 函 数:MPU6050写寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 参 数:Data 要写入寄存器的数据,范围:0x00~0xFF
* 返 回 值:无
*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
MyI2C_Start(); //I2C起始
MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入
MyI2C_ReceiveAck(); //接收应答
MyI2C_SendByte(RegAddress); //发送寄存器地址
MyI2C_ReceiveAck(); //接收应答
MyI2C_SendByte(Data); //发送要写入寄存器的数据
MyI2C_ReceiveAck(); //接收应答
MyI2C_Stop(); //I2C终止
}
/**
* 函 数:MPU6050读寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 返 回 值:读取寄存器的数据,范围:0x00~0xFF
*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
MyI2C_Start(); //I2C起始
MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入
MyI2C_ReceiveAck(); //接收应答
MyI2C_SendByte(RegAddress); //发送寄存器地址
MyI2C_ReceiveAck(); //接收应答
MyI2C_Start(); //I2C重复起始
MyI2C_SendByte(MPU6050_ADDRESS | 0x01); //发送从机地址,读写位为1,表示即将读取
MyI2C_ReceiveAck(); //接收应答
Data = MyI2C_ReceiveByte(); //接收指定寄存器的数据
MyI2C_SendAck(1); //发送应答,给从机非应答,终止从机的数据输出
MyI2C_Stop(); //I2C终止
return Data;
}
/**
* 函 数:MPU6050初始化
* 参 数:无
* 返 回 值:无
*/
void MPU6050_Init(void)
{
MyI2C_Init(); //先初始化底层的I2C
/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理寄存器2,保持默认值0,所有轴均不待机
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频寄存器,配置采样率
MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPF
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪配置寄存器,选择满量程为±2000°/s
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器,选择满量程为±16g
}
/**
* 函 数:MPU6050获取ID号
* 参 数:无
* 返 回 值:MPU6050的ID号
*/
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I); //返回WHO_AM_I寄存器的值
}
/**
* 函 数:MPU6050获取数据
* 参 数:AccX AccY AccZ 加速度计X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 参 数:GyroX GyroY GyroZ 陀螺仪X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 返 回 值:无
*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL; //定义数据高8位和低8位的变量
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); //读取加速度计X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); //读取加速度计X轴的低8位数据
*AccX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H); //读取加速度计Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L); //读取加速度计Y轴的低8位数据
*AccY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H); //读取加速度计Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L); //读取加速度计Z轴的低8位数据
*AccZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H); //读取陀螺仪X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L); //读取陀螺仪X轴的低8位数据
*GyroX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H); //读取陀螺仪Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L); //读取陀螺仪Y轴的低8位数据
*GyroY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H); //读取陀螺仪Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L); //读取陀螺仪Z轴的低8位数据
*GyroZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
}
MPU6050.h
#ifndef __MPU6050_H
#define __MPU6050_H
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);
void MPU6050_Init(void);
uint8_t MPU6050_GetID(void);
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);
#endif
MPU6050_Reg
#ifndef __MPU6050_REG_H
#define __MPU6050_REG_H
#define MPU6050_SMPLRT_DIV 0x19
#define MPU6050_CONFIG 0x1A
#define MPU6050_GYRO_CONFIG 0x1B
#define MPU6050_ACCEL_CONFIG 0x1C
#define MPU6050_ACCEL_XOUT_H 0x3B
#define MPU6050_ACCEL_XOUT_L 0x3C
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48
#define MPU6050_PWR_MGMT_1 0x6B
#define MPU6050_PWR_MGMT_2 0x6C
#define MPU6050_WHO_AM_I 0x75
#endif
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"
uint8_t ID; //定义用于存放ID号的变量
int16_t AX, AY, AZ, GX, GY, GZ; //定义用于存放各个数据的变量
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
MPU6050_Init(); //MPU6050初始化
/*显示ID号*/
OLED_ShowString(1, 1, "ID:"); //显示静态字符串
ID = MPU6050_GetID(); //获取MPU6050的ID号
OLED_ShowHexNum(1, 4, ID, 2); //OLED显示ID号
while (1)
{
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ); //获取MPU6050的数据
OLED_ShowSignedNum(2, 1, AX, 5); //OLED显示数据
OLED_ShowSignedNum(3, 1, AY, 5);
OLED_ShowSignedNum(4, 1, AZ, 5);
OLED_ShowSignedNum(2, 8, GX, 5);
OLED_ShowSignedNum(3, 8, GY, 5);
OLED_ShowSignedNum(4, 8, GZ, 5);
}
}
硬件模拟iic
硬件模拟也就是使用写好的库函数控制DR,SR,CR各个寄存器,而电平的翻转由硬件控制,写入CR或者DR就可以控制时序单元的发生,时序单元发生后就可以检查对应的EVx,也就是检查SR,然后等待时序单元的发送完成,然后依次操作寄存器,等待时序单元发送,如此循环,这是发送部分;接受部分就是写入CR读取DR,产生时序单元,等待事件和时序单元的完成,如此循环
MPU6050.c
#include "stm32f10x.h" // Device header
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0 //MPU6050的I2C从机地址
/**
* 函 数:MPU6050等待事件
* 参 数:同I2C_CheckEvent
* 返 回 值:无
*/
void MPU6050_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
{
uint32_t Timeout;
Timeout = 10000; //给定超时计数时间
while (I2C_CheckEvent(I2Cx, I2C_EVENT) != SUCCESS) //循环等待指定事件
{
Timeout --; //等待时,计数值自减
if (Timeout == 0) //自减到0后,等待超时
{
/*超时的错误处理代码,可以添加到此处*/
break; //跳出等待,不等了
}
}
}
/**
* 函 数:MPU6050写寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 参 数:Data 要写入寄存器的数据,范围:0x00~0xFF
* 返 回 值:无
*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
I2C_GenerateSTART(I2C2, ENABLE); //硬件I2C生成起始条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //等待EV5
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter); //硬件I2C发送从机地址,方向为发送
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED); //等待EV6
I2C_SendData(I2C2, RegAddress); //硬件I2C发送寄存器地址
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTING); //等待EV8
I2C_SendData(I2C2, Data); //硬件I2C发送数据
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED); //等待EV8_2
I2C_GenerateSTOP(I2C2, ENABLE); //硬件I2C生成终止条件
}
/**
* 函 数:MPU6050读寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 返 回 值:读取寄存器的数据,范围:0x00~0xFF
*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
I2C_GenerateSTART(I2C2, ENABLE); //硬件I2C生成起始条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //等待EV5
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter); //硬件I2C发送从机地址,方向为发送
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED); //等待EV6
I2C_SendData(I2C2, RegAddress); //硬件I2C发送寄存器地址
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED); //等待EV8_2
I2C_GenerateSTART(I2C2, ENABLE); //硬件I2C生成重复起始条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //等待EV5
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Receiver); //硬件I2C发送从机地址,方向为接收
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED); //等待EV6
I2C_AcknowledgeConfig(I2C2, DISABLE); //在接收最后一个字节之前提前将应答失能
I2C_GenerateSTOP(I2C2, ENABLE); //在接收最后一个字节之前提前申请停止条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED); //等待EV7
Data = I2C_ReceiveData(I2C2); //接收数据寄存器
I2C_AcknowledgeConfig(I2C2, ENABLE); //将应答恢复为使能,为了不影响后续可能产生的读取多字节操作
return Data;
}
/**
* 函 数:MPU6050初始化
* 参 数:无
* 返 回 值:无
*/
void MPU6050_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE); //开启I2C2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB10和PB11引脚初始化为复用开漏输出
/*I2C初始化*/
I2C_InitTypeDef I2C_InitStructure; //定义结构体变量
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; //模式,选择为I2C模式
I2C_InitStructure.I2C_ClockSpeed = 50000; //时钟速度,选择为50KHz
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; //时钟占空比,选择Tlow/Thigh = 2
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable; //应答,选择使能
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; //应答地址,选择7位,从机模式下才有效
I2C_InitStructure.I2C_OwnAddress1 = 0x00; //自身地址,从机模式下才有效
I2C_Init(I2C2, &I2C_InitStructure); //将结构体变量交给I2C_Init,配置I2C2
/*I2C使能*/
I2C_Cmd(I2C2, ENABLE); //使能I2C2,开始运行
/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理寄存器2,保持默认值0,所有轴均不待机
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频寄存器,配置采样率
MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPF
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪配置寄存器,选择满量程为±2000°/s
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器,选择满量程为±16g
}
/**
* 函 数:MPU6050获取ID号
* 参 数:无
* 返 回 值:MPU6050的ID号
*/
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I); //返回WHO_AM_I寄存器的值
}
/**
* 函 数:MPU6050获取数据
* 参 数:AccX AccY AccZ 加速度计X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 参 数:GyroX GyroY GyroZ 陀螺仪X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 返 回 值:无
*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL; //定义数据高8位和低8位的变量
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); //读取加速度计X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); //读取加速度计X轴的低8位数据
*AccX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H); //读取加速度计Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L); //读取加速度计Y轴的低8位数据
*AccY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H); //读取加速度计Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L); //读取加速度计Z轴的低8位数据
*AccZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H); //读取陀螺仪X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L); //读取陀螺仪X轴的低8位数据
*GyroX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H); //读取陀螺仪Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L); //读取陀螺仪Y轴的低8位数据
*GyroY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H); //读取陀螺仪Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L); //读取陀螺仪Z轴的低8位数据
*GyroZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
}
MPU6050.h
#ifndef __MPU6050_H
#define __MPU6050_H
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);
void MPU6050_Init(void);
uint8_t MPU6050_GetID(void);
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);
#endif
MPU6050_reg.h
#ifndef __MPU6050_REG_H
#define __MPU6050_REG_H
#define MPU6050_SMPLRT_DIV 0x19
#define MPU6050_CONFIG 0x1A
#define MPU6050_GYRO_CONFIG 0x1B
#define MPU6050_ACCEL_CONFIG 0x1C
#define MPU6050_ACCEL_XOUT_H 0x3B
#define MPU6050_ACCEL_XOUT_L 0x3C
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48
#define MPU6050_PWR_MGMT_1 0x6B
#define MPU6050_PWR_MGMT_2 0x6C
#define MPU6050_WHO_AM_I 0x75
#endif
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"
uint8_t ID; //定义用于存放ID号的变量
int16_t AX, AY, AZ, GX, GY, GZ; //定义用于存放各个数据的变量
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
MPU6050_Init(); //MPU6050初始化
/*显示ID号*/
OLED_ShowString(1, 1, "ID:"); //显示静态字符串
ID = MPU6050_GetID(); //获取MPU6050的ID号
OLED_ShowHexNum(1, 4, ID, 2); //OLED显示ID号
while (1)
{
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ); //获取MPU6050的数据
OLED_ShowSignedNum(2, 1, AX, 5); //OLED显示数据
OLED_ShowSignedNum(3, 1, AY, 5);
OLED_ShowSignedNum(4, 1, AZ, 5);
OLED_ShowSignedNum(2, 8, GX, 5);
OLED_ShowSignedNum(3, 8, GY, 5);
OLED_ShowSignedNum(4, 8, GZ, 5);
}
}


![MySQL基础 [五] - 表的增删查改](https://i-blog.csdnimg.cn/direct/45412dc200bb47b188cc5f709c8092da.png)