零、安装
软件包直接安装
帮助文档:http://www.cloudcompare.org/doc
官网:http://www.danielgm.net/cc/
一、操作:分割、删除点
1、打开文件File–>Open
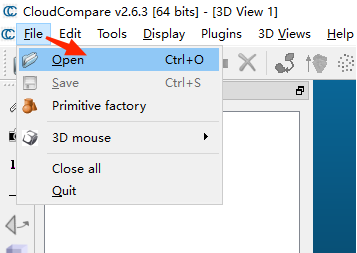
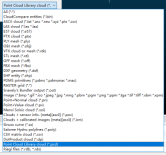
支持的格式:
2、旋转和移动点云
鼠标左键可以旋转、右键可以移动
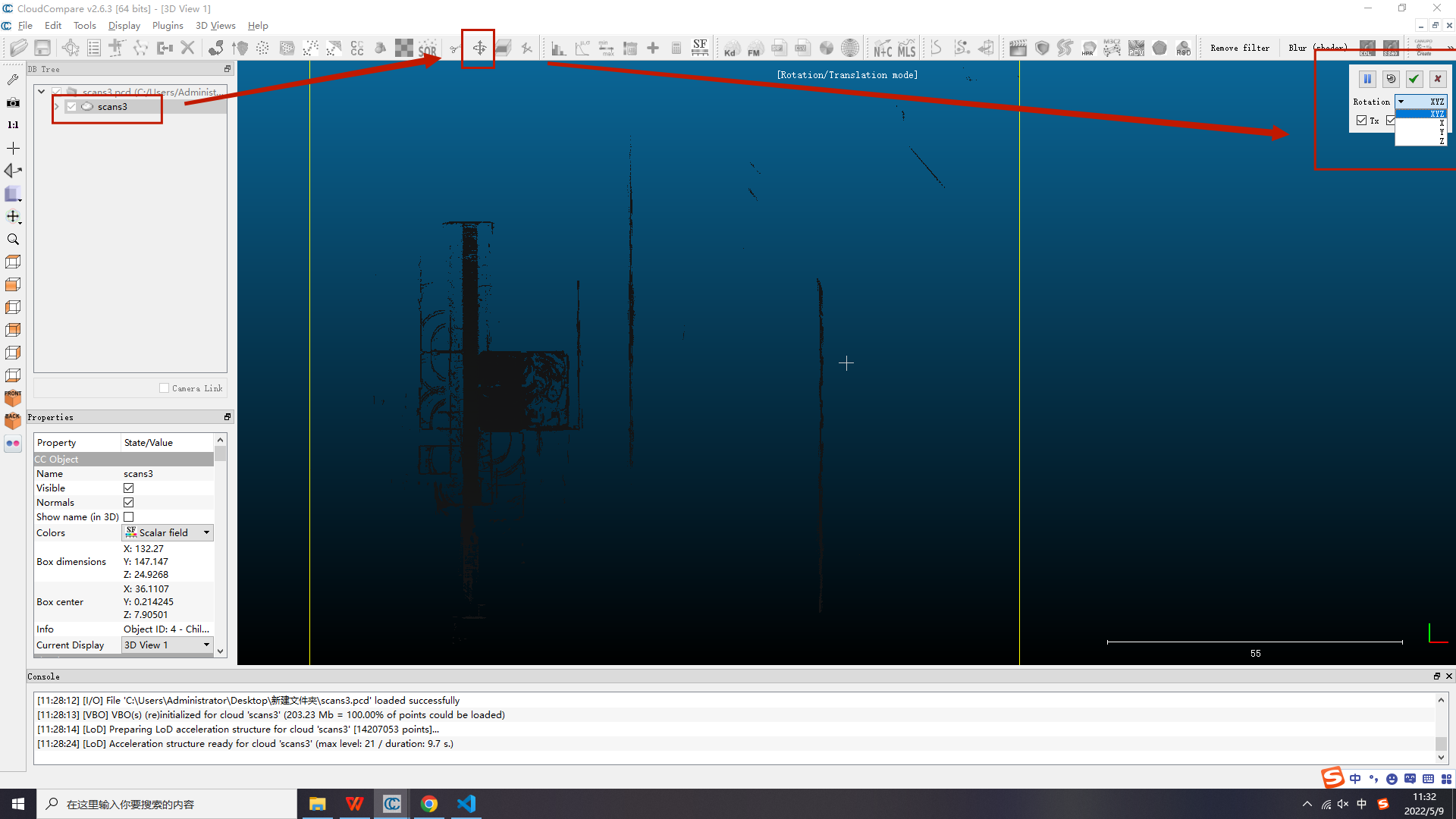
定轴旋转和移动:Translate/rotate,选择x、y、z轴后左右键定轴旋转或平面内平移
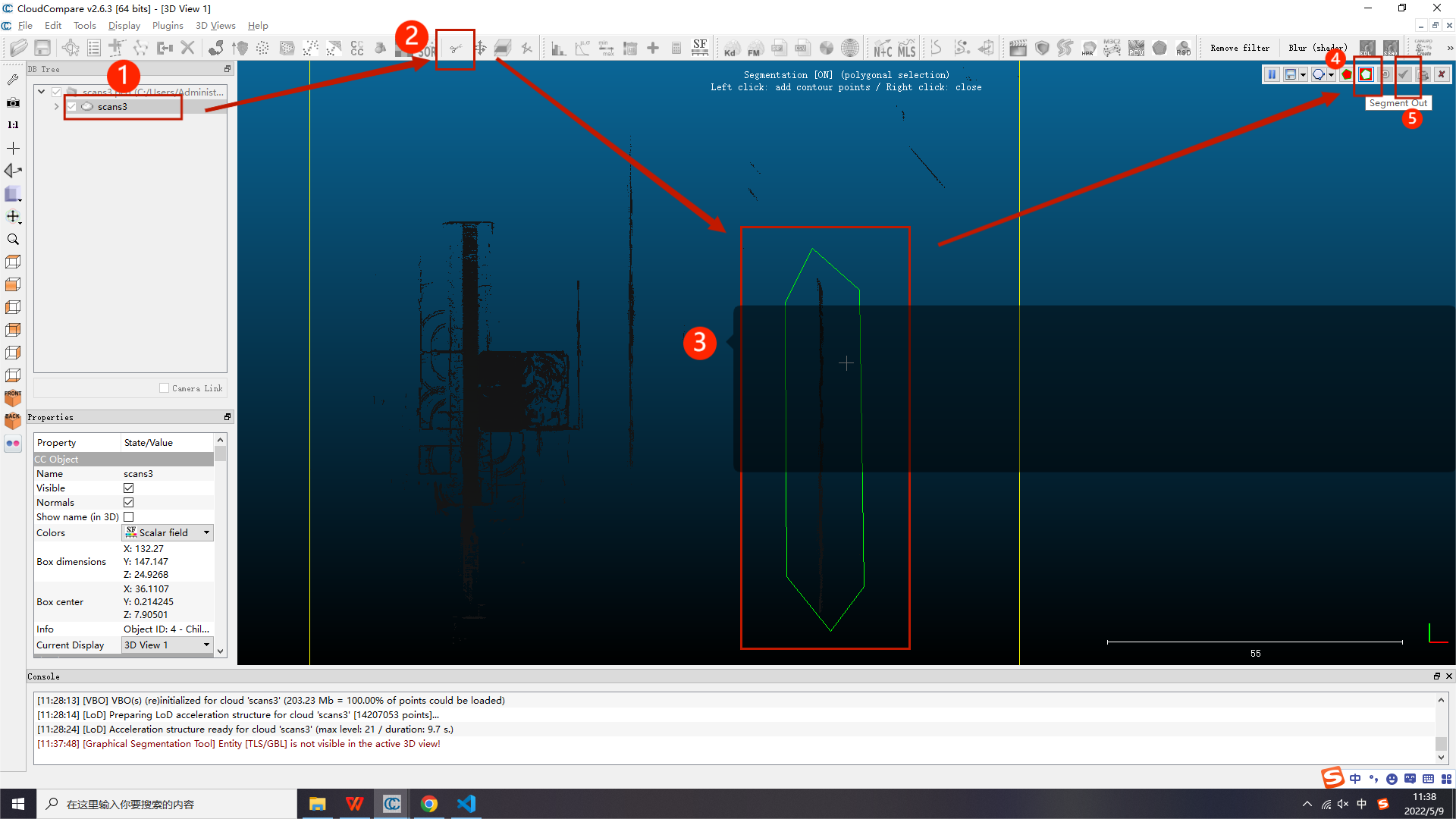
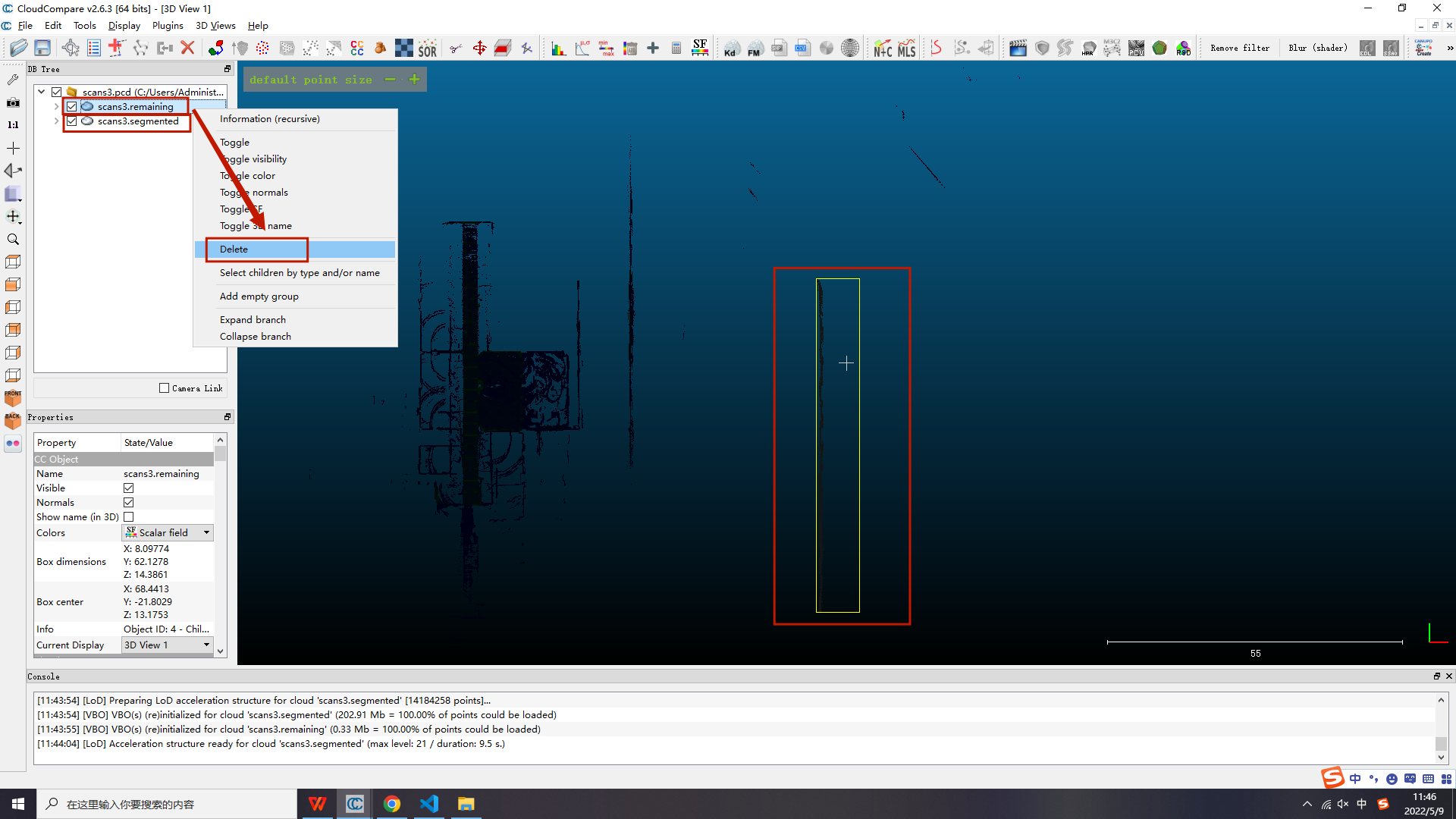
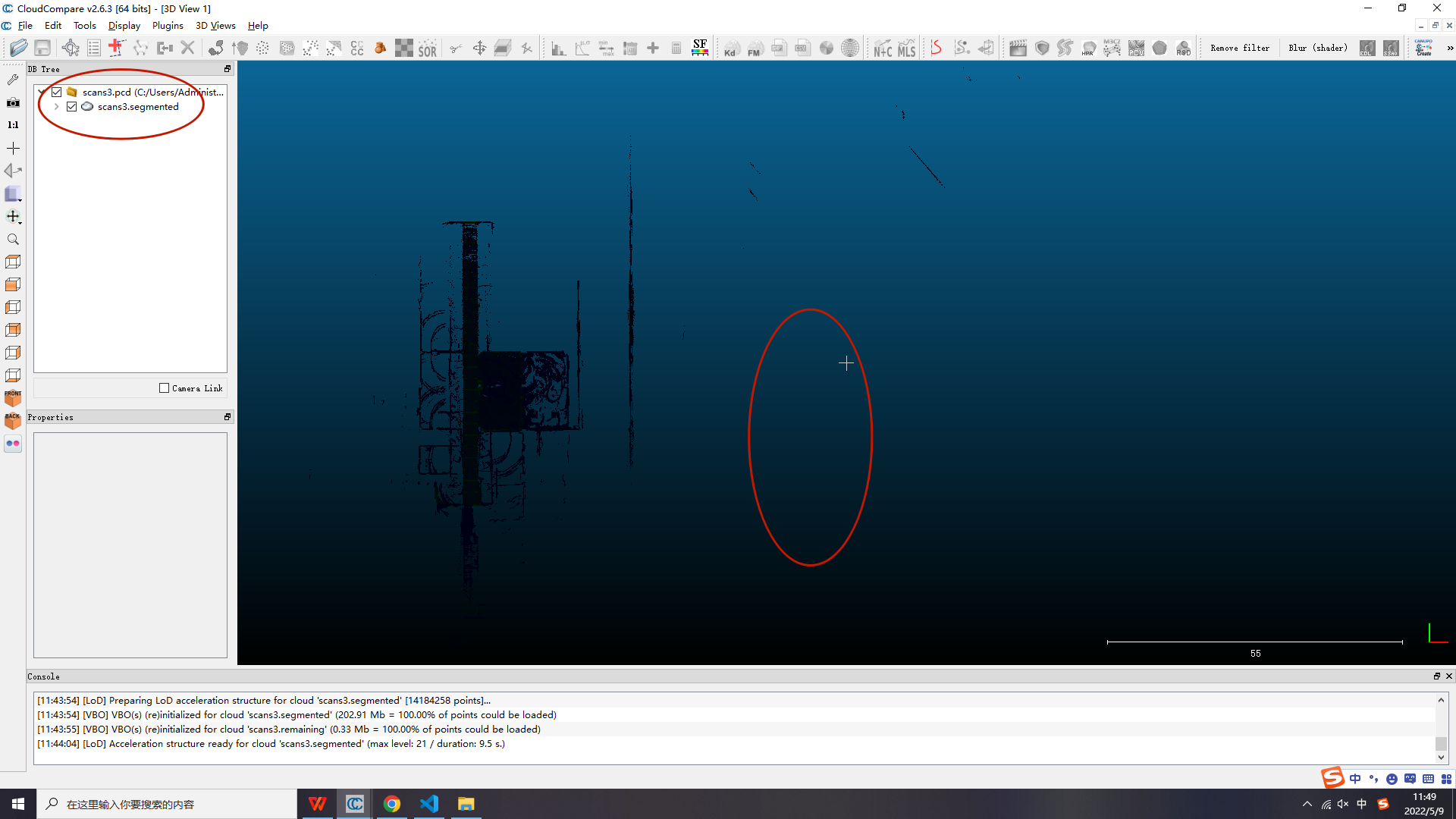
3、分割点云、删除不需要的点
分割点云:选中要分割的点云文件–>Segment–>左键框出要分割的点或者区域–>Segment Out–>Comfirm Segmentation,原点云文件被分割成两个结构,选中分割出来的remaining,右键delete即可。
二、操作:配准、拼接点云
1、同时打开两个需要拼接的pcd文件
2、移动两个点云到大致位置
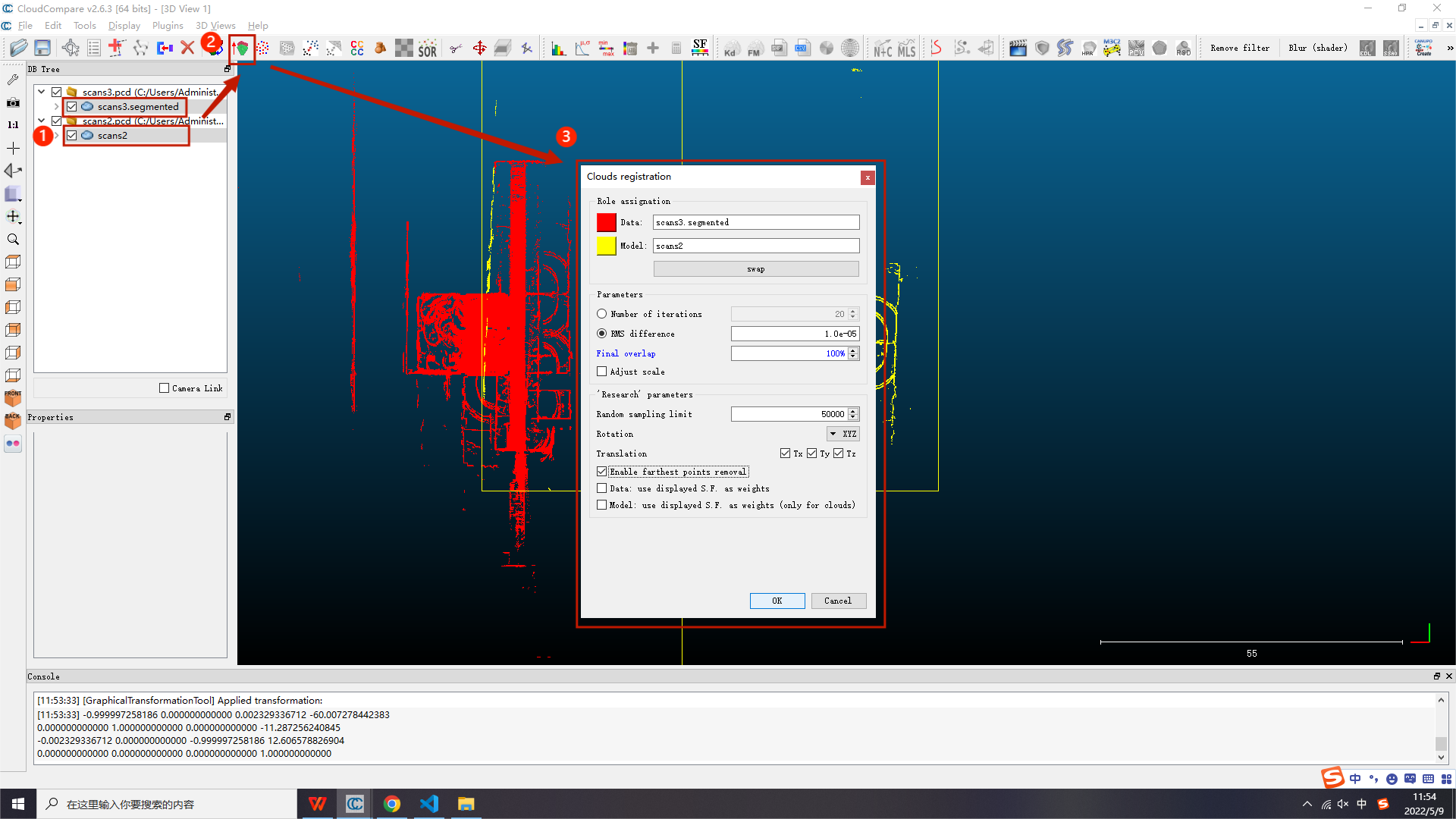
3、ipc配准两团点云
配准点云:ctrl+左键 选中两团点云–>Cloud registration 进入ICP匹配参数设置–>设置合适的参数–>ok–>完成配准
(需要按步骤2先确定大致的位置关系)
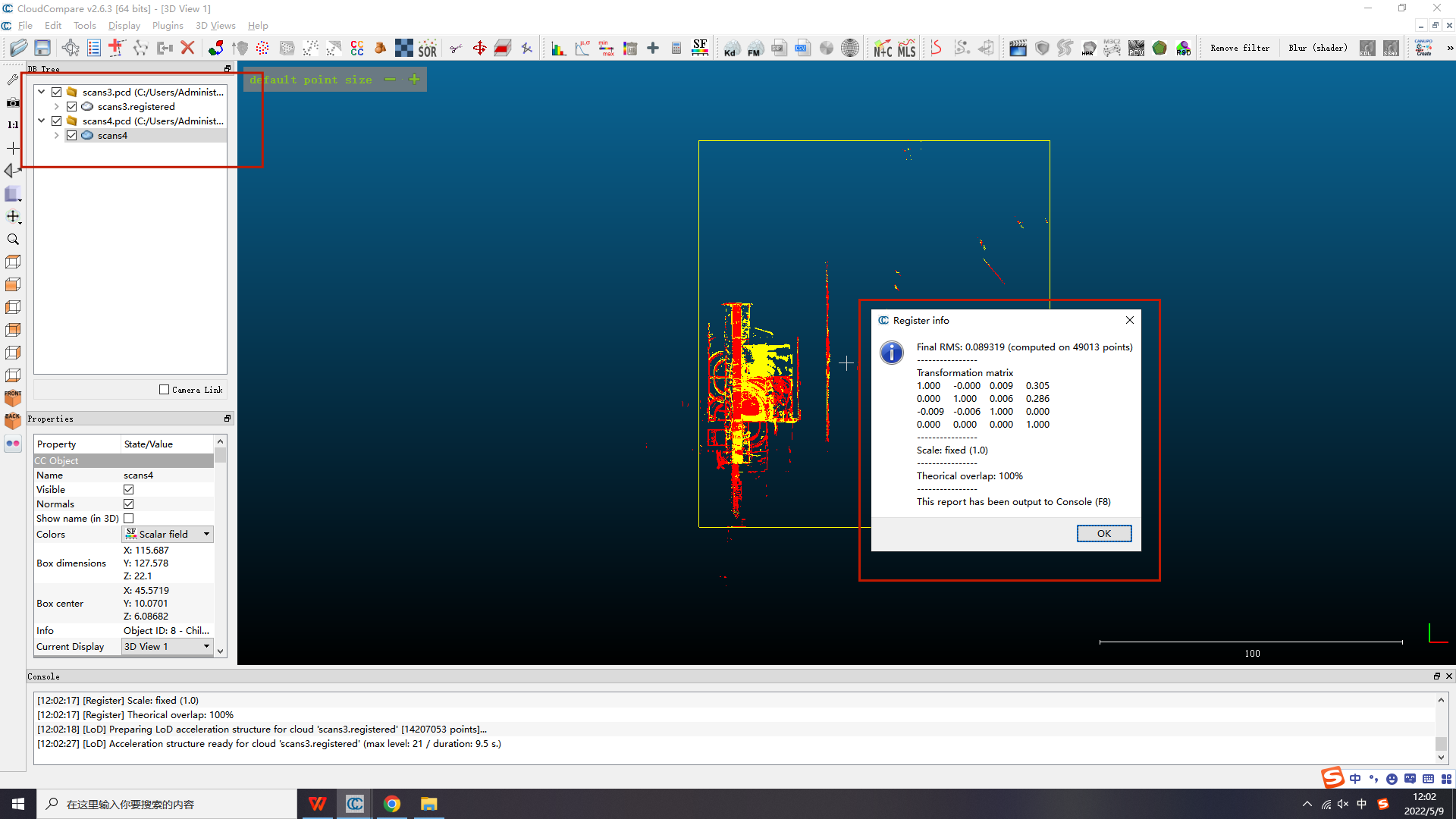
配准完成之后会有一个窗口,可以记下旋转矩阵,可能有用。
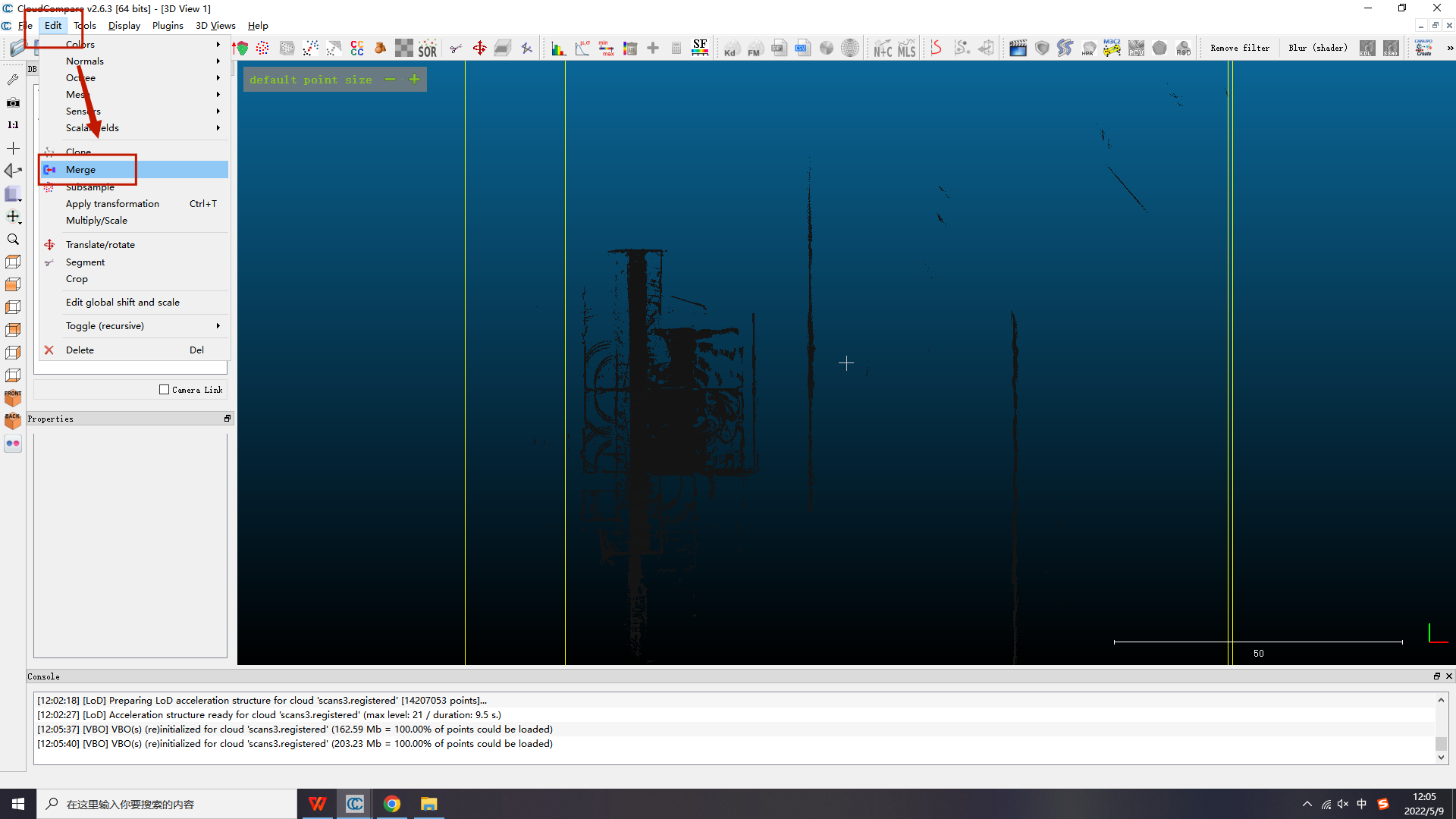
4、拼接配准后的两团点云
edit–>Merge
左侧两个点云文件合并成一个
5、滤波掉重合点
tools–>other–>remove dumplicate points
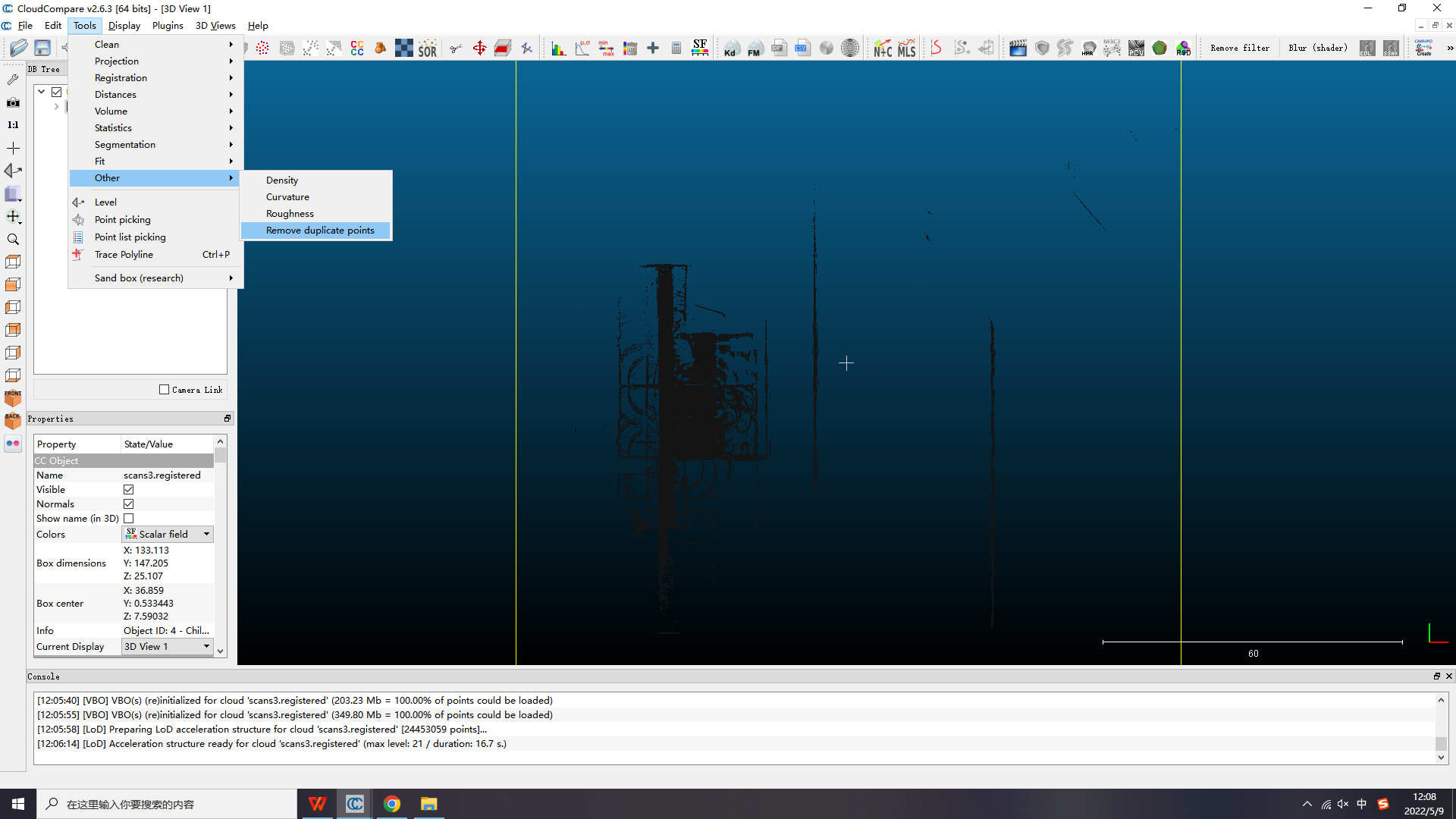
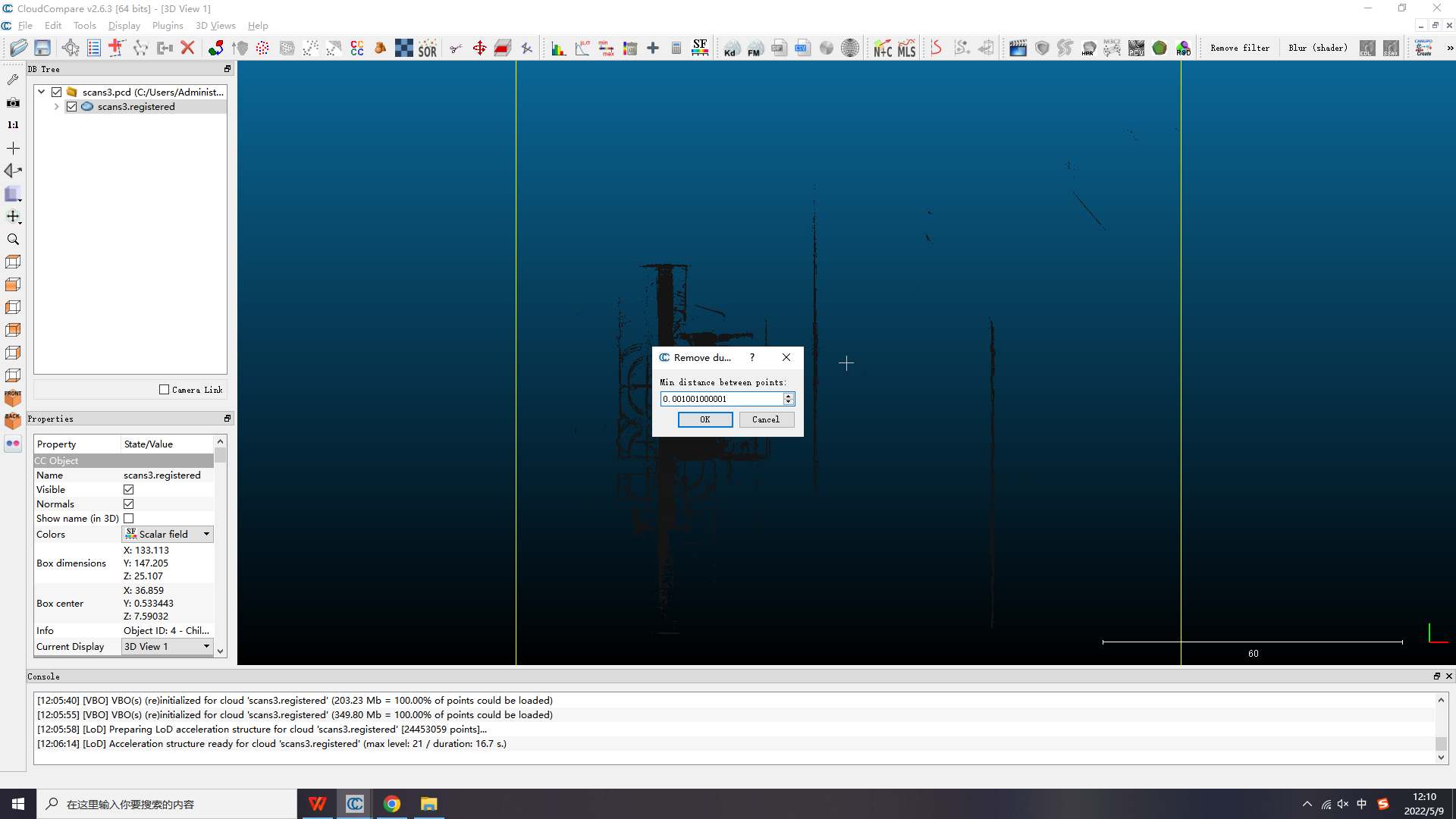
在弹出的窗口选择滤掉的力度
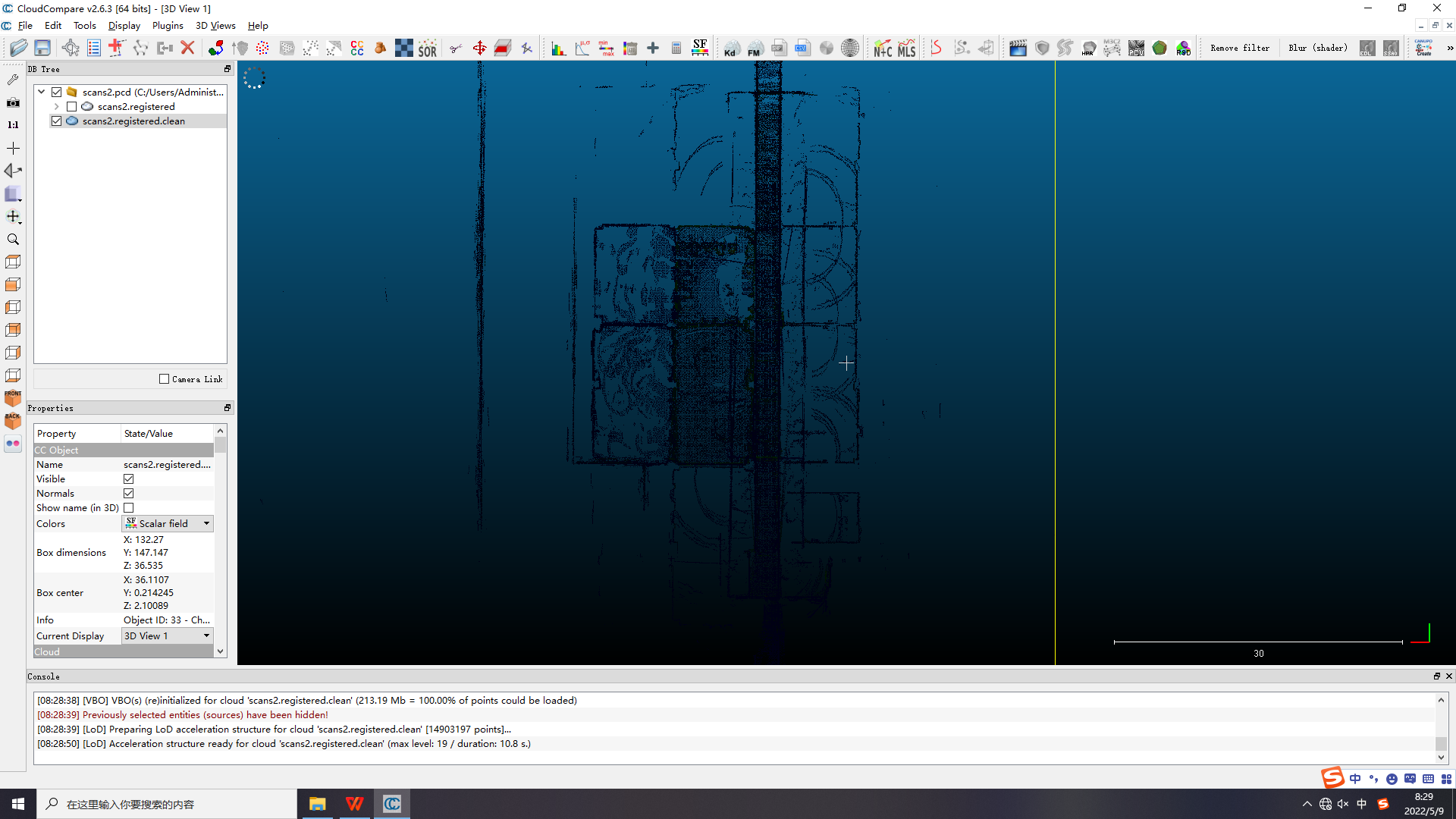
6、保存结果
File–>save
其他操作如下
二、File
open:打开文件
save:保存
Global Shift settings:设置最大绝对坐标,最大实体对角线
Primitive Factory:生成三维几何体模型
3D mouse:对3D鼠标(如3Dconnexion)的支持
Close all:关闭所有打开的实体
Quit:退出软件
三、Edit
1.颜色渲染
Colors > Set Unique:为所选实体设置单一颜色
Colors > Colorize:为所选实体着色,具体表现为分别用所选颜色乘以当前颜色的RGB而得到新的颜色
Colors > Levels:通过调整颜色的柱形图更改所选实体的颜色(未实现)
Colors > Height Ramp:为所选实体设置颜色渐变(线形、梯形、环形)
Colors > Convert to grey scale:为所选实体设置颜色为灰度显示
Colors > Convert to Scalar Field:将当前的 RGB 颜色字段转换为一个或几个标量字段
Colors > Interpolate from another entity:在所选实体中插入另外一个实体的颜色
Colors > Enhance with intensities:增强强度特征
Colors > Clear:移除所选实体的颜色域
2.法线估计
Normals > Compute:计算所选实体的法线
Normals > Invert:反转所选实体的法线
Normals > Orient Normals > With Minimum Spanning Tree:用最小生成树的方法精细化计算点云的全部法线
Normals > Orient Normals > With Fast Marching:用快速行进法重新精细化计算点云的全部法线
Normals > Convert to > HSV:将云的法线转换到 HSV 颜色字段
Normals > Convert to > Dip and Dip direction SFs:转换点云的法线到两个标量域
Normals > Export normals to SF(s):将法线按照XYZ纬度渲染
Normals > Clear:为选定的实体移除法线
3.八叉树
Octree > Compute:强制计算给定实体的八叉树
Octree > Resample:用每个八叉树最小体素单元内所有点的质心来代替体素内所有点进行重新取样
4.网格操作
Mesh > Delaunay 2.5D (XY plane):计算点云在x y xyxy平面上的2.5D Delaunay三角剖分
Mesh > Delaunay 2.5D (best fit plane):计算点云在最佳平面的2.5D Delaunay三角剖分
Mesh > Convert texture/material to RGB:将选定网格的网格材料和纹理信息转换为逐个点的 RGB 字段
Mesh > Sample points:在一个网格中随机取样
Mesh > Smooth (Laplacian):拉普拉斯平滑算法
Mesh > Subdivide:细分网格,此算法递归细分网格三角形,直到他们的表面细分到用户指定值之下。
Mesh > Measure surface:测量网格的总体表面积和每个三角形的平均表面积,在控制台输出
Mesh > Measure volume:测量闭合网格的体积,在控制台输出
Mesh > Flag vertices:检查网格的基本特性,为每个网格样本做标志:0 = normal,1 = border,2 = non-manifold
Mesh > Scalar field > Smooth:平滑网格顶点相关联的标量场。此方法与高斯滤波(Gaussian Filter)相反。运用qPCV插件后,此方法特别有用
Mesh > Scalar field > Enhance:增强与网格顶点相关联的标量场。运用qPCV插件后,此方法特别有用
5.标量域
Scalar fields > Show histogram:对当前选中的实体显示有效标量域的柱形图
Scalar fields > Compute statistical parameters:计算统计分布(高斯分布、威布尔分布)
Scalar fields > Gradient:计算标量域的梯度
Scalar fields > Gaussian filter:高斯滤波,平滑一个标量域
Scalar fields > Bilateral filter:双边滤波,平滑一个标量域
Scalar fields > Filter by Value:用标量值筛选选定的点云
Scalar fields > Convert to RGB:将有效的标量域转化为RGB颜色域
Scalar fields > Convert to random RGB:将有效的标量域转化为随机的RGB颜色域
Scalar fields > Rename:重命名选中实体有效的标量域
Scalar fields > Add constant SF:用一个常数添加一个标量域
Scalar fields > Add point indexes as SF:用点索引的方式为所选点云创建一个新的标量域
Scalar fields > Export coordinate(s) to SF(s):导出坐标到标量域
Scalar fields > Set SF as coordinate(s):为选中的点云设置标量域的坐标
Scalar fields > Arithmetic:可以对在同一个点云的两个标量域进行标准运算(+,-,*,/),或者对单个标量域进行函数运算
Scalar fields > Color Scales Manager:色阶管理,可以管理和创建新的颜色域
Scalar fields > Delete:对选中的实体删除有效的标量域
Scalar fields > Delete all (!):对选中的实体删除全部的有效标量域
6.实用工具
Clone:克隆选中的点云
Merge:合并两个或者多个实体。可以合并点云(原始点云会被删除);可以合并网格(原始网格不会修改,CC会创建一个新的网格结构)
Subsample:采集原始点云的子样本,可以用随机、立体、基于八叉树的方式采集,子样本会保持原始点云的标量、颜色、法线等性质。
Apply Transformation:对选中的实体做变换(4X4矩阵、轴线角,欧拉角)
Multiply / Scale:点云缩放
Translate / Rotate:手动旋转平移选中的实体
Segment:通过画2D多边形裁剪分割选中的实体
Crop:分割一个或多个在3D-Box里面的点云
四、Tools
1.点云去噪
Clean > SOR filter:统计滤波
Clean > Noise filter:低通滤波
2.点云展开
Projection > Unroll:展开圆柱或圆锥体的点云成一个平面
CloudCompare——圆柱/圆锥形点云展开为平面
Projection > Rasterize:栅格化点云(转化为2.5D网格),然后可以导出为一个新点云或者一个光栅图像
Projection > Contour plot to mesh:可以把一组折线转化为网格,输出边缘轮廓线
Projection > Export coordinate(s) to SF(s):导出坐标到标量域
3.点云配准
Registration > Match bounding-box centers:调整所有选中的实体,让它们的中心在一个地方
Registration > Match scales:匹配具有缩放关系的实体
Registration > Align (point pairs picking):在两个实体中挑选至少三个对应的点来配准两个实体
Registration > Fine registration (ICP):ICP配准,前提是:①两个云大体上相融;②表现为同样的对象或者至少有同样的形状
Distances > Cloud/Cloud dist. (cloud-to-cloud distance):计算两个点云之间的距离
Distances > Cloud/Mesh dist. (cloud-to-mesh distance):计算点云和网格之间的距离
Distances > Closest Point Set:计算两个点云之间最近的点的集合
4.点云统计
Statistics > Local Statistical Test:可以以标量域的局部统计为基础进行分割和过滤点云
Statistics > Compute Stat. Params:计算统计分布(高斯分布、威布尔分布)
5.点云分割
Segmentation > Label Connected Components:设置最小距离,把所选的云分割成更小的部分,每一部分相互连接
Segmentation > Cross Section:用户可以定义一个裁剪框,可调整框的范围和方向,来裁剪点云。可以用来:①在一个或多个维度重复分割过程;②获取多边形的轮廓
Segmentation > Extract Sections:可以在一个点云的顶部画或者导入多边形来提取截面和轮廓
6.点云拟合
Fit > Plane:拟合点云中的一个平面并输出各种信息,如拟合 RMS、 垂直平面、地质的倾角、倾角方向值等
Fit > Sphere:拟合球体
Fit > 2D Polygon:拟合二维多边形
Fit > 2.5D quadric:拟合二次曲面
Batch export > Export cloud info:输出点云的基本信息到Excel
Batch export > Export plane info:输出点云的拟合平面基本信息到Excel
7.点线面操作
Level:选择三个点确定一个平面来操作
Point picking:可以选择一个、两个、三个点来得到各种信息,如点的坐标、RGB、标量值、距离、角度等信息(尤其是两点间的距离)
Point list picking:可以选择多个点创建一个点列表,可以输出为一个文件、一个新点云、一个折线
8.其他
Other > Density:估量一个点云的密度
Other > Remove duplicate points:通过设置两点之间最小距离来删除重复的点
Other > Curvature:计算点云的曲率
五、Display
Full screen:全屏
Refresh:刷新,强制刷新有效的3D视图的内容(OpenGL图形重绘)
Toggle Centered Perspective:在正交视图和对象中心视图模式中切换
Toggle Viewer Based Perspective:在正交视图和透视图中切换
Lock rotation about vert. axis:锁定围绕Z轴的影像旋转
Enter bubble-view mode:进入泡沫视图模式
Render to File:可以渲染当前的3D视图成一个图像文件(支持多数标准文件格式),还可以缩放以适应更大分辨率的屏幕
Display settings:对各种显示进行设置:颜色和材质、色阶、标签、其他
Camera settings:影像设置
Save viewport as object:保存当前3D视图的可视体的参数(影像位置和方、透视状态)为一个可视实体,这个实体自动地添加DB树的根
Adjust zoom:调整缩放比例
Test Frame Rate:测试帧速率,让有效的3D视图在一个较短时间旋转从而估量平均帧数,结果在控制台显示
Lights > Toggle Sun Light:切换为太阳光模式
Lights > Toggle Custom Light:切换自定义的光
Shaders and Filters > Remove filter:禁用任何活动的着色器或者OpenGL过滤器
Active scalar field > Toggle color scale:为所选活动的实体切换色阶
Active scalar field > Show previous SF:改变当前所选对象的标量域,激活先前的标量域
Active scalar field > Show next SF:改变当前所选对象的标量域,激活下一个的标量域
Console:控制台(显示/隐藏)
Toolbars:工具栏,包括主工具栏、标量域、视图、插件、GL滤镜
Reset all GUI elements:退出前自动存储当前GUI信息(位置和工具栏的可见性等),可以恢复原始配置
六、Plugins
1.Standard
qHPR (Hidden Point Removal):如果点云是闭合曲面,则可以过滤(删除)掉通过当前3D影像不能看到的云
qPCL (Point Cloud Library Wrapper):有PCL库一些方法的接口,主要包括:①计算法线和曲率②异常点和噪声点的去除③移动最小二乘法平滑点云
qPCV (ShadeVis / Ambient Occlusion):计算点云的明亮度,类似于光线来自于对象周围的半球或球体(可以自定义光线距离)
qPoissonRecon (Poisson Surface Reconstruction):Poisson表面重建,用三角网络生成算法构建的简单的表面
qRansacSD (RANSAC Shape Detection):随机抽样一致形状检测,运用自动形状检测算法的简单接口
qSRA (Surface of Revolution Analysis):计算一个点云和一个假定旋转平面之间的距离(旋转平面用2D轮廓定义),距离计算好后,用户可以创建一个偏差的2D图或者圆柱或圆锥的投影
qCANUPO (Point Cloud Classification):可自动对点云进行分类,也可以手动分类
qM3C2 (Robust C2C Distances Computation):用独特的方法计算两个点云之间的有向(稳健)距离
qCork (Boolean Operations on Meshes):可以执行网格中的布尔操作(也称CSG = 构造实体几何),它基于Cork库
qAnimation:动画渲染插件
qFacets:可以从点云中自动提取二维切面,以它们的垂直距离分开
qCSF (Cloth Simulation Filter):基于布模拟滤波算法,能实现地面点与非地面点的分离,去除非地面点
应用实例:CSF地面滤波
qCompass:简单地实现点云中地质结构的它的轨迹的数字化
qBroom (qVirtualBroom):高效地扫描和清理
qHoughNormals:计算法法线
qGMMREG:对小型实体的非刚性云的匹配
qLAS_FWF:这个插件可以读写标准雷达文件,可以在命令模式下打开LAS 1.3+文件
qPoissonRecon:可以让输入的点云颜色映射到成网格(快速直接地分配到颜色接近输入点颜色的网格顶点)
2.GL
qEDL (Eye Dome Lighting):实时底纹滤镜,用来在空白的点云或者网格中增强少量特质(除了几何信息外,它不依赖于其他信息)
qSSAO (Screen Space Ambient Occlusion):实时底纹滤镜,与环境相似的遮挡
qBlur:一个简单的模糊处理滤镜,主要用于开发人员的演示
3.Deprecated
qKinect (Point Cloud Acquisition with a Kinect):可以用Kinect设备获取(有色的)点云
七、3D Views
New:创建3D视图
Close:关闭3D视图
Close All:关闭所有3D视图
Tile:共享的所有 3D 视图之间的显示空间
Cascade:用串联的方式重新排列所有 3D 视图
Next:激活顺序创建的下一个3D视图
Previous:激活顺序创建的上一个3D视图






![[刷题] 删除有序数组中的重复项](https://img-blog.csdnimg.cn/549ec1e1498f4148993533efbf9e03f0.png)

![[LeetCode 1401]圆和矩形是否有重叠](https://img-blog.csdnimg.cn/3d9dec9bb0654a589b993de0337a83ee.png)

