在前面的文章 从BNO055传感器获取IMU数据-1 中介绍了BNO055传感器,今天继续讲解应用示例。
传感器与Arduino接口
我从某宝购买了固定在带有支持组件的开发板上的 BNO055 传感器。从 Digi-Key 或贸泽购买 BNO055 并将其焊接到 7.5×4.4mm 28 引脚 LGA 至 DIP 转换器上,以便在无焊试验板上进行原型设计,可以节省一点钱。但是对于运输后的边际成本节省,我不推荐它。
要开始使用 BNO055 与 Arduino 接口,请按照以下步骤操作:
- 连接电源、接地、SDA 和 SCL
- 打开Arduino IDE,然后单击Sketch→Include Library→Manage Libraries
- 搜索并安装“Adafruit BNO055”和“Adafruit Sensor”
- 打开并编辑文件→示例→Adafruit BNO055→Raw Data以注释掉欧拉角部分并取消注释四元数部分,或复制并粘贴下面的代码片段。
#include
#include
#include
#include
/*
This program is an abridged version of Adafruit BNO055 rawdata.ino available after installing the Adafruit BNO055 library
File→Examples→Adafruit BNO055→Raw Data
Connections on Arduino Uno
=========================================================================
SCL to analog 5 | SDA to analog 4 | VDD to 3.3V DC | GND to common ground
*/
#define BNO055_SAMPLERATE_DELAY_MS (100) // Delay between data requests
Adafruit_BNO055 bno = Adafruit_BNO055(); // Create sensor object bno based on Adafruit_BNO055 library
void setup(void)
{
Serial.begin(115200); // Begin serial port communication
if(!bno.begin()) // Initialize sensor communication
{
Serial.print("Ooops, no BNO055 detected ... Check your wiring or I2C ADDR!");
}
delay(1000);
bno.setExtCrystalUse(true); // Use the crystal on the development board
}
void loop(void)
{
imu::Quaternion quat = bno.getQuat(); // Request quaternion data from BNO055
Serial.print(quat.w(), 4); Serial.print("\t"); // Print quaternion w
Serial.print(quat.x(), 4); Serial.print("\t"); // Print quaternion x
Serial.print(quat.y(), 4); Serial.print("\t"); // Print quaternion y
Serial.print(quat.z(), 4); Serial.println(); // Print quaternion z
delay(BNO055_SAMPLERATE_DELAY_MS); // Pause before capturing new data
}
该程序只需通过I2C与BNO055通信,并通过UART端口将数据流回计算机。四元数数据作为制表符分隔的数据发送回,每个四元数后带有换行符。
请记住,在校准传感器之前,数据无效。
四元数数据样本
对于以下示例,我从 BNO055 请求四元数数据,因为它以随机方向放置在办公桌附近。你的以通过在单词quaternion后面的括号中输入逗号分隔值来手动解释 WolframAlpha.com 数据(例如,“quaternion(0.403, 0.414, 0.085, 0.812)”)
| W | X | Y | Z |
|---|---|---|---|
| 0.40344238 | 0.41363525 | 0.08508301 | 0.81176757 |
上面的数字是一个四元数,描述了传感器相对于参考方向的当前方向。
当然没有必要每次在互联网上查看你的四元数数据,但可以选择性仔细检查数据是很好的实践,尤其是在入门学习阶段。
使用 Mathematica 捕获数据
Mathematica是一个多功能的计算机程序,几乎可以处理你能想象到的任何数据。对于那些感兴趣的人,我整理了几行代码,演示如何从设备接收数据以及如何使用Mathematica通过一些基于四元数的函数来评估数据。下面的代码是为Windows编写的,因此Linux和Mac用户可能必须更改输入设备行(以bConnect开头的行)。
链接: https://pan.baidu.com/s/1AI1Npdj_jgKbg5o0esHtMQ?pwd=mp63 提取码: mp63 复制这段内容后打开百度网盘手机App,操作更方便哦
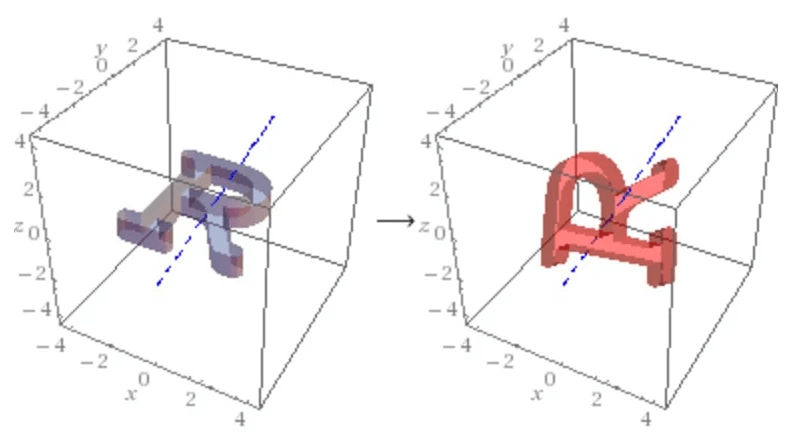
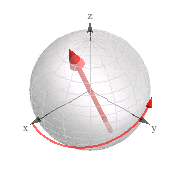
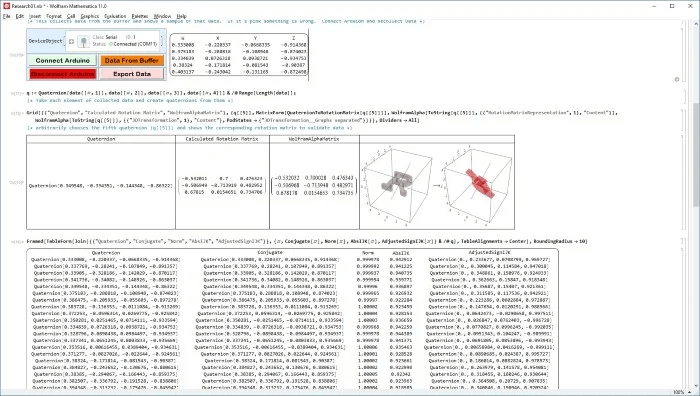
Mathematica允许实时和事后收集和处理数据。对于此演示,我选择了一个程序,该程序从串行缓冲区收集数据,将其转换为旋转矩阵,并使用旋转矩阵重新定向参考球体中的箭头。
首先单击“连接Arduino”,然后单击“来自缓冲区的数据”。我没有合并任何数据验证或错误检查,因此如果数据区域为空白或格式错误,唯一的选择是重新收集数据。
Mathematica能够在数据通过串行端口到达时读取和处理数据,但对于此演示,存储在缓冲区中的30个左右的测量值应该足以看到程序是如何工作的。
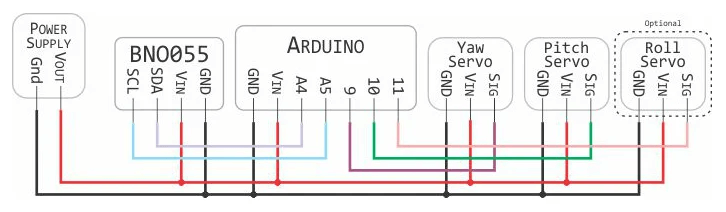
控制两轴云台
BNO055非常适合机器人使用。作为示例应用,我将使用 BNO055 控制安装在基于伺服的两轴云台上的激光器。该代码应该允许无缝引入第三个旋转轴,供任何有幸拥有旋转轴的读者使用。
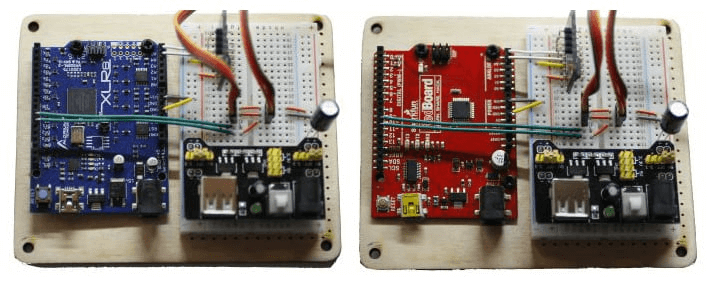
像以前一样连接BNO055并添加伺服器,连接到数字引脚9-11。如果您使用云台来固定相机,请考虑升级到 Alorium XLR8 板。伺服依赖于精确的计时,如果Arduino正在处理竞争任务,则可能导致抖动。XLR8是由FPGA制成的Arduino的直接替代品。它有一个库,可以从单独的“XLR8tor”(加速器)块控制伺服系统,以实现稳定和流畅的伺服运动。
//---- Included Libraries ----//
#include // I²C library
#include // trig functions
#include // Base library for sensors
#include // BNO055 specific library
#include // Vector, Matrix, and IMUMath library
//#include // Standard Servo library
#include // XLR8 servo library
#include // XLR8 accelerated floating point math
#define BNO055_SAMPLERATE_DELAY_MS (50) // Set pause between samples
//---- Variable Declaration ----//
boolean debug = true; // true/false = extra/no information over serial
int rollPin = 9; // Digital pin for roll
int yawPin = 10; // Digital pin for yaw
int pitchPin = 11; // Digital pin for pitch
float roll, pitch, yaw; // Variable to hold roll, pitch, yaw information
Adafruit_BNO055 bno = Adafruit_BNO055(); // Use object bno to hold information
Servo rollServo; // Create servo rollServo
Servo pitchServo; // Create servo pitchServo
Servo yawServo; // Create servo yawServo
void setup(void) {
rollServo.attach(rollPin); // The rollServo is connected at rollPin
pitchServo.attach(pitchPin); // The pitchServo is connected at pitchPin
yawServo.attach(yawPin); // The yawServo is connected at yawPin
Serial.begin(115200); // Create serial connection at 115,000 Baud
if (!bno.begin()) // Attempt communication with sensor
{
Serial.print("Ooops, no BNO055 detected ... Check your wiring or I2C ADDR!");
}
delay(100); // Wait 0.1 seconds to allow it to initialize
bno.setExtCrystalUse(true); // Tell sensor to use external crystal
}
//---- Main Program Loop ----//
void loop() {
//---- Request Euler Angles from Sensor ----//
imu::Vector<3> euler = bno.getVector(Adafruit_BNO055::VECTOR_EULER);
if (debug) { // If debug is true, send information over serial
Serial.print("Measured Euler Roll-Pitch-Yaw");
Serial.print("\t yaw: "); Serial.print(euler.x()); Serial.print("\t");
Serial.print("\t pitch: "); Serial.print(euler.z()); Serial.print("\t");
Serial.print("\t roll: "); Serial.print(euler.y()); Serial.println();
}
/* Remap information from the sensor over the 0° - 180° range of the servo
The Yaw values are between 0° to +360°
The Roll values are between -90° and +90°
The Pitch values are between -180° and +180°
*/
int servoYaw = map(euler.x(), 0, 360, 0, 180);
int servoRoll = map(euler.y(), -90, 90, 0, 180);
int servoPitch = map(euler.z(), -180, 180, 0, 180);
if (debug) { // If debug is true, send information over serial
Serial.print("Measured Euler Roll-Pitch-Yaw");
Serial.print("\t Yaw Servo: "); Serial.print(servoYaw); Serial.print("\t");
Serial.print("\t Pitch Servo: "); Serial.print(servoPitch); Serial.print("\t");
Serial.print("\t Roll Servo: "); Serial.print(servoRoll); Serial.println();
}
// If debug is true, send information over serial
if (debug) {
Serial.println("Calculated Servo Roll-Pitch-Yaw");
Serial.print("\t roll:"); Serial.print(servoRoll, DEC); Serial.print("\t");
Serial.print("\t pitch:"); Serial.print(servoPitch, DEC); Serial.print("\t");
Serial.print("\t yaw:"); Serial.print(servoYaw, DEC); Serial.println();
}
rollServo.write(servoRoll); // Send mapped value to rollServo
pitchServo.write(servoPitch); // Send mapped value to rollServo
yawServo.write(servoYaw); // Send mapped value to rollServo
delay(BNO055_SAMPLERATE_DELAY_MS); // Wait before rerunning loop
}
源码下载👇
链接: https://pan.baidu.com/s/1NmL1emNqXAdRGV0XEq8u5Q?pwd=wdu1 提取码: wdu1 复制这段内容后打开百度网盘手机App,操作更方便哦
视频演示:
Capturing IMU Data with a BNO055 Absolute Orientation Sensor [HUVFAYmNjh8]
总结
BNO055是一款易于使用的惯性测量单元,可集成到各种应用中,从机器人稳定(四轴飞行器,倒立摆等)到相机稳定和导航(包括航位推算)。
与其他输出原始测量数据的 9 自由度系统不同,BNO055 为主机微控制器过滤和合成数据,从而释放处理器带宽并消除编程中的猜测。
公众号 | FunIO
微信搜一搜 “funio”,发现更多精彩内容。
个人博客 | blog.boringhex.top