目录
- 前言
- 一、设计者
- 二、维护者
- 三、系统架构
- 四、ROS自身结构
前言
从不同的角度,对ROS架构的描述也是不同的,一般我们可以从设计者、维护者、系统结构与自身结构4个角度来描述ROS结构:
一、设计者
ROS设计者将ROS描述为“ROS = Plumbing + Tools + Capabilities + Ecosystem”
即
Plumbing: 通讯机制(实现ROS不同节点之间的交互)
Tools :工具软件包(ROS中的开发和调试工具)
Capabilities :机器人高层技能(ROS中某些功能的集合,比如:导航)
Ecosystem:机器人生态系统(跨地域、跨软件与硬件的ROS联盟)
二、维护者
维护者的角度: ROS 架构可划分为两大部分
main:核心部分,主要由Willow Garage 和一些开发者设计、提供以及维护。它提供了一些分布式计算的基本工具,以及整个ROS的核心部分的程序编写。
universe:全球范围的代码,有不同国家的ROS社区组织开发和维护。一种是库的代码,如OpenCV、PCL等;库的上一层是从功能角度提供的代码,如人脸识别,他们调用下层的库;最上层的代码是应用级的代码,让机器人完成某一确定的功能。
三、系统架构
ROS 可以划分为三层
OS 层,即操作系统
ROS 是元操作系统,需要依托真正意义的操作系统,目前兼容性最好的是 Linux 的 Ubuntu,Mac、Windows 也支持 ROS 的较新版本
中间层是 ROS 封装的关于机器人开发的中间件,比如:
基于 TCP/UDP 继续封装的 TCPROS/UDPROS 通信系统,用于进程间通信 Nodelet,为数据的实时性传输提供支持
另外,还提供了大量的机器人开发实现库,如:数据类型定义、坐标变换、运动控制
应用层
功能包,以及功能包内的节点,比如: master、turtlesim的控制与运动节点
四、ROS自身结构
ROS 自身也可以划分为三层
文件系统
ROS文件系统级指的是在硬盘上面查看的ROS源代码的组织形式
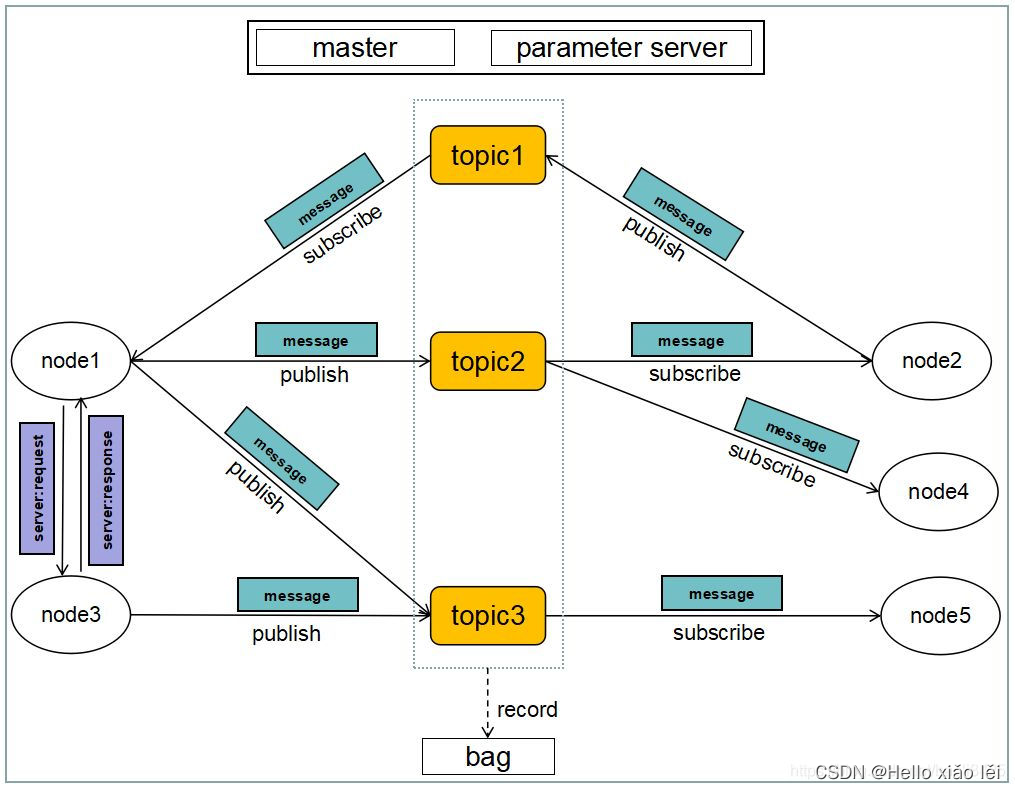
计算图
ROS 分布式系统中不同进程需要进行数据交互,计算图可以以点对点的网络形式表现数据交互过程,计算图中的重要概念: 节点(Node)、消息(message)、通信机制_主题(topic)、通信机制_服务(service)
开源社区
ROS的社区级概念是ROS网络上进行代码发布的一种表现形式
ROS开源社区级主要关于ROS资源,能够通过独立的网络社区分享软件和知识。这些资源包括:
发行版(Distribution) —— ROS发行版是可以独立安装的,带有版本号的一系列功能包集。ROS发行版像Linux发行版一样发挥类似的作用。这使得ROS软件安装更加容易,而且能够通过一个软件集合来维持一致的版本。
软件源(Repositorie) —— ROS依赖于共享开源代码与软件源的网站或主机服务,在这里不同的机构能够发布分享各自的机器人软件和程序。
ROS Wiki —— ROS Wiki是用于记录有关ROS系统信息的主要论坛。任何人都可以注册账户和贡献自己的文件,提供更正和更新,编写教程以及其他信息。
邮件列表(Mailing list) —— ROS用户邮件列表是关于ROS的主要交流渠道,能够交流从ROS软件更新到ROS软件使用中的各种疑问或信息。