使用esp32+micropython+microdot搭建web(http+websocket)服务器(超详细)第二部分
- microdot文档速查 什么是Microdot?Microdot是一个可以在micropython中搭建物联网web服务器的框架
- micropyton文档api速查 Quick reference for the ESP32
实现http服务器
有了前面的经验,我们现在用esp32实现http服务器
我们要实现通过网页控制四个舵机
项目视频展示
准备工作
-
esp32开发板一个

-
esp32拓展板一个

-
舵机四个
-
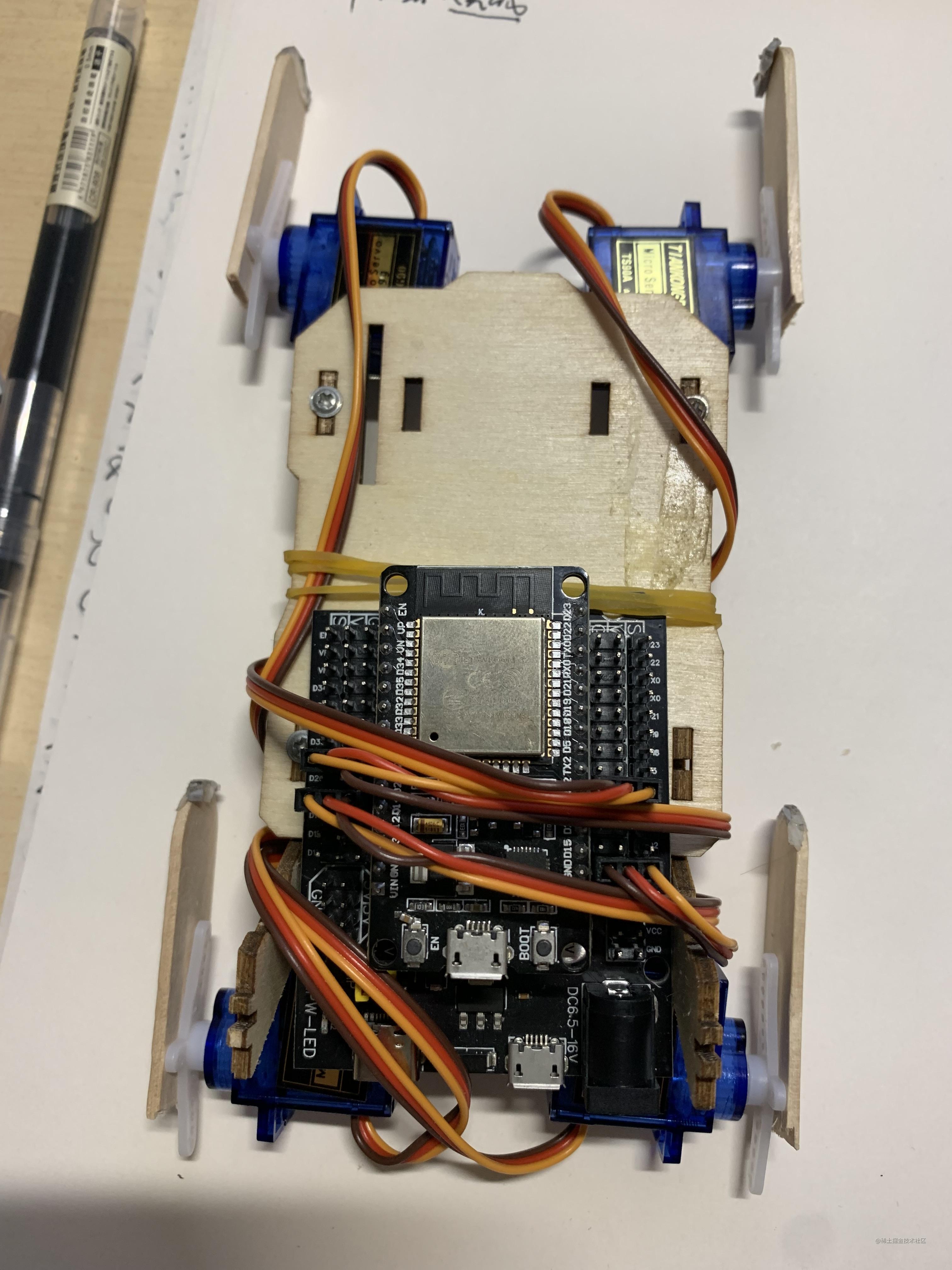
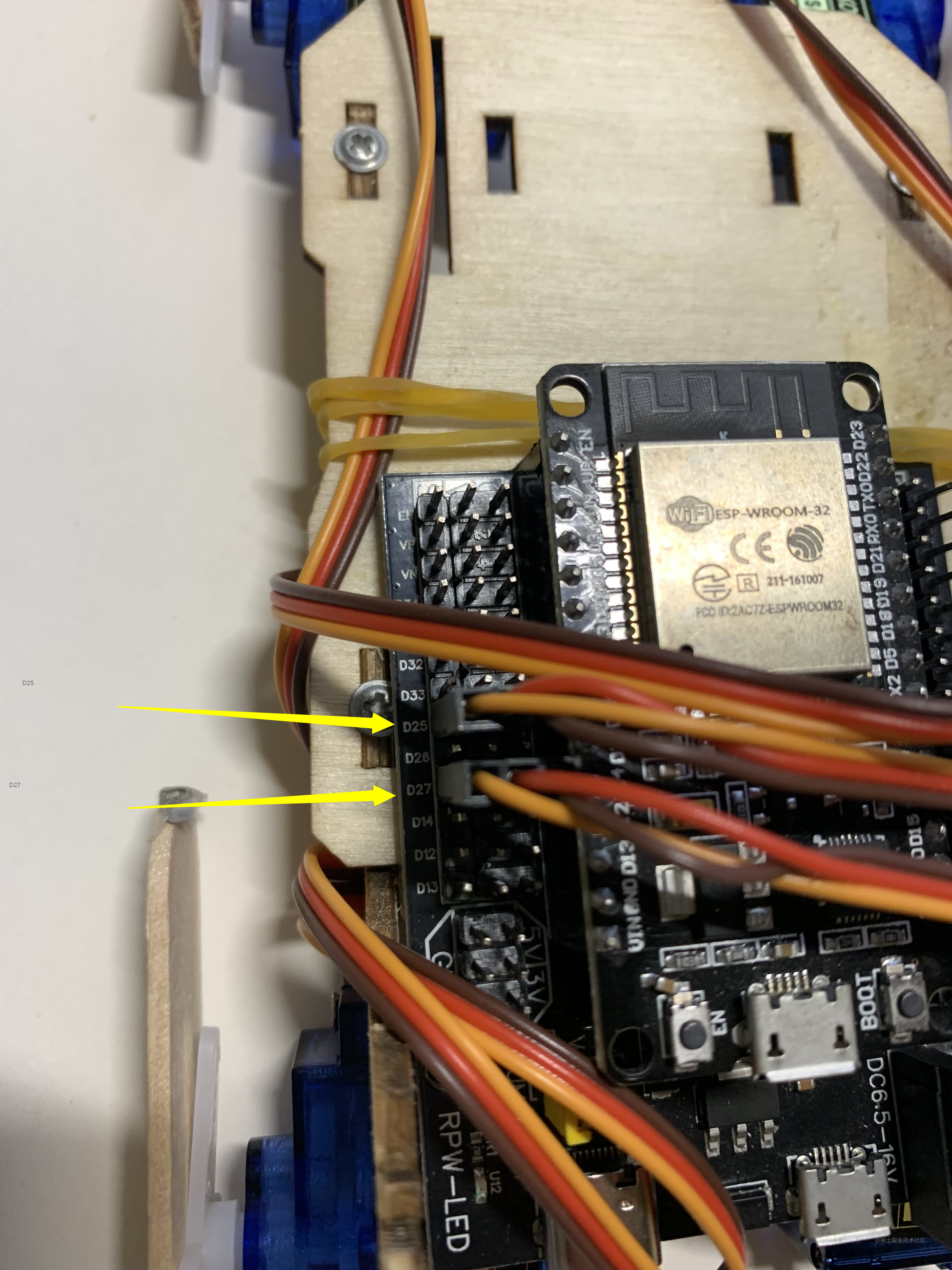
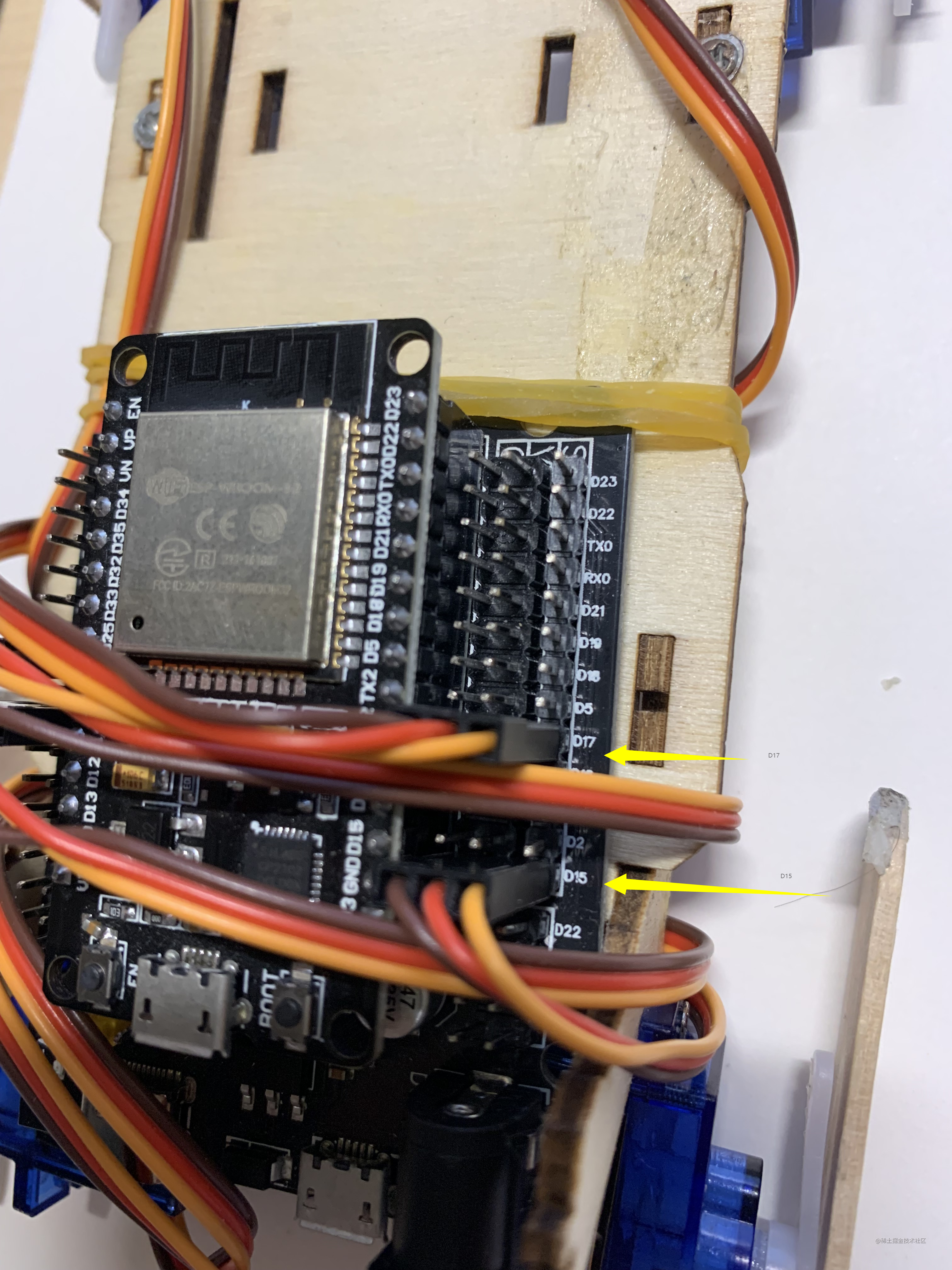
简单组装
-
注意接口(线头颜色千万别插反了!!!)
esp32http接口搭建
在MicroPython设备 新建目录结构
-
lib 存放一些库文件
- microdot.py (microdot-main\src中)前面章节有
-
common
- connect_wifi.py (连接热点)前面章节有
- servo.py (操作舵机移动角度)
-
public 存放网页内容
- index.html 网页
-
main.py (程序主入口)
servo.py
# 导入PWM库
from machine import PWM
# 数学库
import math
# 构造函数
class Servo:
def __init__(self,pin,freq=50,min_us=600,max_us=2400,angle=180):
self.min_us = min_us
self.max_us = max_us
self.us = 0
self.freq = freq
self.angle = angle
self.pwm =PWM(pin,freq=freq,duty=0)
def write_us(self,us):
if us == 0:
self.pwm.duty(0)
return
us = min(self.max_us,max(self.min_us,us))
duty = us *1024 * self.freq // 1000000
self.pwm.duty(duty)
def write_angle(self,degrees=None,redians=None):
if degrees is None:
degrees = math.degrees(radians)
degrees = degrees % 360
total_range = self.max_us - self.min_us
us = self.min_us + total_range * degrees // self.angle
self.write_us(us)
index.html
<!DOCTYPE html>
<html lang="en">
<head>
<meta charset="UTF-8">
<meta http-equiv="X-UA-Compatible" content="IE=edge">
<meta name="viewport" content="width=device-width, initial-scale=1.0">
<title>滑动</title>
</head>
<body>
<h1>滑动四个电机</h1>
<input type="range" min="0" max="180" value="1" step="1" name="" id="">
<div class="content">
</div>
<script>
let ipt = document.querySelector("input")
let content = document.querySelector(".content")
// 防抖函数 防止服务器接受大量请求
const throttle = (func,interval)=>{
let last = 0;
return function(){
let args = arguments
let now = Date.now();
if(now - last > interval){
func.apply(this,args)
last = now
}
}
}
ipt.addEventListener("input",throttle((e)=>{
let value = ipt.value
fetch("/move/"+value,{
}).then(e=>{
content.innerHTML = e.status
}).catch(err=>{
content.innerHTML = "error"+err
})
},500))
</script>
</body>
</html>
main.py
# 导入Microdot
from lib.microdot import Microdot,send_file
# 连接wifi
from common.connect_wifi import do_connect
from common.servo import Servo
# 导入引脚
from machine import Pin
# 对应四个电机 从左上角顺时针排序
s1 = Servo(Pin(15))
s2 = Servo(Pin(17))
s3 = Servo(Pin(25))
s4 = Servo(Pin(27))
# 复位
s1.write_angle(0)
s2.write_angle(180-0)
s3.write_angle(180-0)
s4.write_angle(0)
# esp32 引脚2是一颗自带的 led的灯
light = Pin(2,Pin.OUT)
# 开始连接wifi
do_connect()
# 实例化这个类
app = Microdot()
# get请求返回一个网页
@app.route('/')
def index(request):
return send_file('public/index.html')
# 设置一个get请求 如果收到信息就操作舵机
@app.get('/move/<int:angle>')
def index(request,angle):
print("angle",angle)
# angle为前端发过来的舵机旋转角度
s1.write_angle(angle)
# 这里用180-angle因为2,3舵机在右侧
s2.write_angle(180-angle)
s3.write_angle(180-angle)
s4.write_angle(angle)
return "移动到:"+angle
# 端口号为5000
app.run(host='0.0.0.0', port=5000, debug=False, ssl=None)
开发完成
完成了哈哈哈哈项目视频展示