文章目录
- 机器人逆运动学
- ※ 代数解、几何解,解析解(封闭解)、数值解的含义与联系
- ○ 代数解求 θ 1 \theta_1 θ1、 θ 2 \theta_2 θ2、 θ 3 \theta_3 θ3
- ※参考资料
- · 求解 θ 1 \theta_1 θ1
- · 求解 θ 3 \theta_3 θ3
- · 求解 θ 2 \theta_2 θ2
- ♦ 机器人学导论的方法(失败的尝试)
- ♦ 参考的文章中的方法(失败的尝试)
- ♦ 一个大佬的论文的方法(可以得到正确结果的方法)
- ○ 几何解求 θ 1 \theta_1 θ1、 θ 2 \theta_2 θ2、 θ 3 \theta_3 θ3
CSDN提示我字数太多,一篇发不下,只好拆分开
关于
- 标准DH模型
- 改进DH模型
- 机器人正运动学
的相关内容详见前一篇文章:
→→→【工业机器人运动学与Matlab正逆解算法学习笔记(用心总结一文全会)(一)】
❤ 2023.6.19 ❤
机器人逆运动学
※ 代数解、几何解,解析解(封闭解)、数值解的含义与联系
说起来我刚碰到这几个概念的时候还是挺晕的,和别人交流之后发现晕的不止我一个,经常有人把概念搞混、搞错。
下面有请ChatGPT先来回答一下
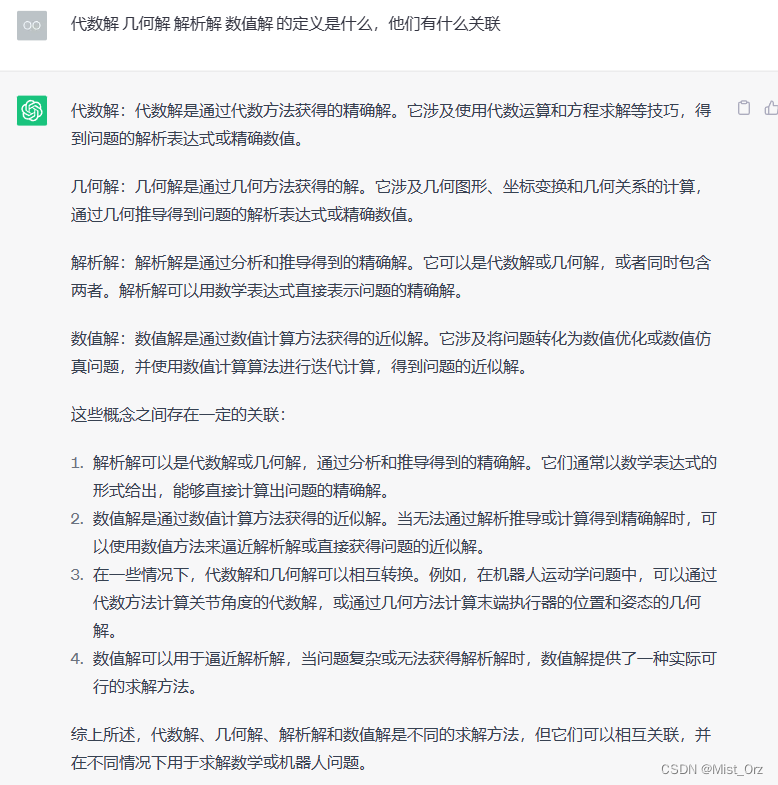
然后我总结一下
代数解和几何解都属于解析解(封闭解),他们的特点是可以列出具体的方程,求得的结果是精确的。不一样的地方是,代数解是根据矩阵的特性,通过特定元素相等的方法建立方程组,求解出未知数;而几何解是通过机器人的几何关系建立方程组,求解未知数。
只有特定构型的机器人存在解析解,不过好在我们平时用到的机器人大多数都是特定构型的。
数值解与解析解相对应,特点是运算过程靠迭代,求得的结果是近似解。他适用于所有机器人,包括特殊构型和一般构型,大多在不存在解析解的机器人上使用。
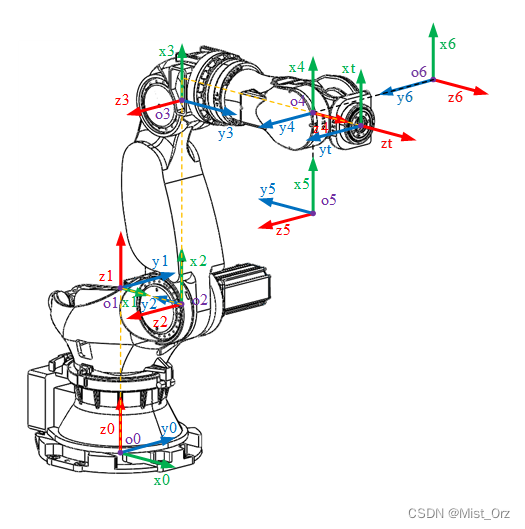
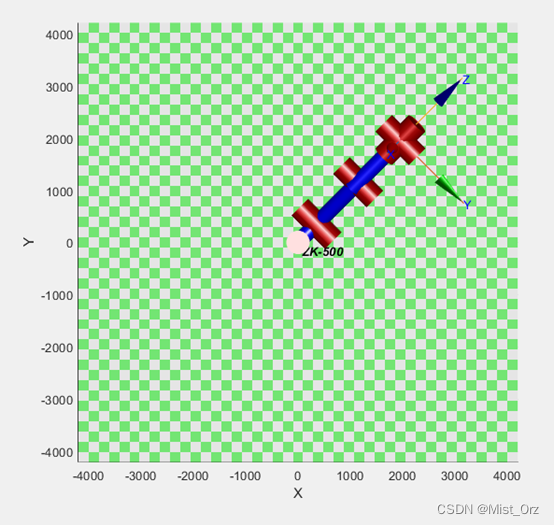
针对ZK-500机器人,因为属于后三轴交于一点的特殊构型,所以这里使用解析法求机器人逆解。
首先将位姿描述矩阵写成如下形式
6 0 T = [ n x o x a x p x n y o y a y p y n z o z a z p z 0 0 0 1 ] = 1 0 T ( θ 1 ) 2 1 T ( θ 2 ) 3 2 T ( θ 3 ) 4 3 T ( θ 4 ) 5 4 T ( θ 5 ) 6 5 T ( θ 6 ) {_6^0}T=\left[\begin{matrix}n_x&o_x&a_x&p_x\\n_y&o_y&a_y&p_y\\n_z&o_z&a_z&p_z\\0&0&0&1\\\end{matrix}\right]={_1^0}T\left(\theta_1\right)\ _2^1T\left(\theta_2\right)\ _3^2T\left(\theta_3\right)\ _4^3T\left(\theta_4\right)\ _5^4T\left(\theta_5\right)\ _6^5T\left(\theta_6\right) 60T= nxnynz0oxoyoz0axayaz0pxpypz1 =10T(θ1) 21T(θ2) 32T(θ3) 43T(θ4) 54T(θ5) 65T(θ6)
○ 代数解求 θ 1 \theta_1 θ1、 θ 2 \theta_2 θ2、 θ 3 \theta_3 θ3
※参考资料
→→→【MD-H模型运动学正解、逆解及姿态角的解算验证】
这真是个宝藏作者了
→→→《机器人学导论》(John J Craig)
· 求解 θ 1 \theta_1 θ1
首先将上式中包含 θ 1 \theta_1 θ1的部分移动到方程的左边
[ 1 0 T ( θ 1 ) ] − 1 6 0 T = 2 1 T ( θ 2 ) 3 2 T ( θ 3 ) 4 3 T ( θ 4 ) 5 4 T ( θ 5 ) 6 5 T ( θ 6 ) {\left[{_1^0}T\left(\theta_1\right)\right]^{-1}}\ _6^0T={_2^1}T\left(\theta_2\right)\ _3^2T\left(\theta_3\right)\ _4^3T\left(\theta_4\right)\ _5^4T\left(\theta_5\right)\ _6^5T\left(\theta_6\right) [10T(θ1)]−1 60T=21T(θ2) 32T(θ3) 43T(θ4) 54T(θ5) 65T(θ6)
将 1 0 T {_1^0}T 10T求逆,等式写成如下形式
[ c 1 s 1 0 0 − s 1 c 1 0 0 0 0 1 − d 1 0 0 0 1 ] [ n x o x a x p x n y o y a y p y n z o z a z p z 0 0 0 1 ] = 6 1 T \left[\begin{matrix}c_1&s_1&0&0\\-s_1&c_1&0&0\\0&0&1&-d_1\\0&0&0&1\\\end{matrix}\right]\left[\begin{matrix}n_x&o_x&a_x&p_x\\n_y&o_y&a_y&p_y\\n_z&o_z&a_z&p_z\\0&0&0&1\\\end{matrix}\right]={_6^1}T c1−s100s1c100001000−d11 nxnynz0oxoyoz0axayaz0pxpypz1 =61T
求解出 6 1 T {_6^1}T 61T后,通过观察等式两边的矩阵,令元素(2,4)相等得到
− s 1 p x + c 1 p y = 0 -s_1p_x+c_1p_y=0 −s1px+c1py=0
- ※ 【这个方程是怎么得到的】
这个求解过程内容比较多,我姑且用matlab算了一下。。。
- 等式左边矩阵(每个方括号代表一行)
[nx*cos(Q1) + ny*sin(Q1),
ox*cos(Q1) + oy*sin(Q1),
ax*cos(Q1) + ay*sin(Q1),
px*cos(Q1) + py*sin(Q1)]
[ny*cos(Q1) - nx*sin(Q1),
oy*cos(Q1) - ox*sin(Q1),
ay*cos(Q1) - ax*sin(Q1),
py*cos(Q1) - px*sin(Q1)]
[nz,oz,az,pz - d1]
[0,0,0,1]
- 等式右边矩阵(每个方括号代表一行)
[- cos(Q6)*(sin(Q2 + Q3)*sin(Q5) - cos(Q2 + Q3)*cos(Q4)*cos(Q5)) - cos(Q2 + Q3)*sin(Q4)*sin(Q6),
sin(Q6)*(sin(Q2 + Q3)*sin(Q5) - cos(Q2 + Q3)*cos(Q4)*cos(Q5)) - cos(Q2 + Q3)*cos(Q6)*sin(Q4),
sin(Q2 + Q3)*cos(Q5) + cos(Q2 + Q3)*cos(Q4)*sin(Q5),
a1 + a3*cos(Q2 + Q3) + d4*sin(Q2 + Q3) + a2*cos(Q2)]
[- cos(Q4)*sin(Q6) - cos(Q5)*cos(Q6)*sin(Q4),
cos(Q5)*sin(Q4)*sin(Q6) - cos(Q4)*cos(Q6),
sin(Q4)*sin(Q5),
0]
[cos(Q6)*(cos(Q2 + Q3)*sin(Q5) + sin(Q2 + Q3)*cos(Q4)*cos(Q5)) - sin(Q2 + Q3)*sin(Q4)*sin(Q6),
- sin(Q6)*(cos(Q2 + Q3)*sin(Q5) + sin(Q2 + Q3)*cos(Q4)*cos(Q5)) - sin(Q2 + Q3)*cos(Q6)*sin(Q4),
sin(Q2 + Q3)*cos(Q4)*sin(Q5) - cos(Q2 + Q3)*cos(Q5),
a3*sin(Q2 + Q3) - d4*cos(Q2 + Q3) + a2*sin(Q2)]
[0,0,0,1]
果然包含 θ 1 \theta_1 θ1(这里是 Q 1 Q_1 Q1)的元素里面就(2,4)最好算。。。
式中, p x p_x px、 p y p_y py均为已知,则 θ 1 \theta_1 θ1可表示为:
θ 1 = A t a n 2 ( p y , p x ) \theta_1=\mathrm{Atan2}\left(p_y,p_x\right) θ1=Atan2(py,px)
【!!】注意,这里用的是 A t a n 2 ( ) \mathrm{Atan2}\left(\right) Atan2(),这个函数与 A t a n ( ) \mathrm{Atan}\left(\right) Atan()一样是求反正切,但是他的值域为 ( − π , π ) (-\pi,\pi) (−π,π),可以得到角度对应的象限,是增强版的 A t a n ( ) \mathrm{Atan}\left(\right) Atan()。还有需要注意的是输入变量先 p y p_y py再 p x p_x px。
具体可以参考
→→→atan2()
→→→atan2 vs atan
此处存在两组解:
θ
1
=
A
t
a
n
2
(
p
y
,
p
x
)
\theta_1=\mathrm{Atan2}\left(p_y,p_x\right)
θ1=Atan2(py,px)
或
θ
1
′
=
A
t
a
n
2
(
−
p
y
,
−
p
x
)
=
θ
1
+
180
∘
\theta_1^\prime=\mathrm{Atan2}\left(-p_y,-p_x\right)=\theta_1+{180}^\circ
θ1′=Atan2(−py,−px)=θ1+180∘
- matlab代码实现
%% theta1求解
%theta1可能的解有两组
theta1_1=atan2(py,px);
theta1_2=atan2(py,px)+pi;
· 求解 θ 3 \theta_3 θ3
令上面等式中矩阵元素(1,4)和(3,4)左右相等得:
c 1 p x + s 1 p y = a 1 + a 2 c 2 + a 3 c 23 + d 4 s 23 p z − d 1 = a 2 s 2 + a 3 s 23 − d 4 c 23 c_1p_x+s_1p_y=a_1+a_2c_2+a_3c_{23}+d_4s_{23}\\ p_z-d_1=a_2s_2+a_3s_{23}-d_4c_{23} c1px+s1py=a1+a2c2+a3c23+d4s23pz−d1=a2s2+a3s23−d4c23
等号左右平方和得
m
2
+
n
2
=
a
2
2
+
a
3
2
+
d
4
2
+
2
a
2
(
a
3
c
3
+
d
4
s
3
)
m^2+n^2=a_2^2+a_3^2+d_4^2+2a_2\left(a_3c_3+d_4s_3\right)
m2+n2=a22+a32+d42+2a2(a3c3+d4s3)
其中:
m
=
c
1
p
x
+
s
1
p
y
−
a
1
n
=
p
z
−
d
1
m=c_1p_x+s_1p_y-a_1\\ n=p_z-d_1
m=c1px+s1py−a1n=pz−d1
关于这一步的计算过程:
我用这段代码演示:
syms a1 a2 a3 d4 theta2 theta3
m=a2*cos(theta2)+a3*cos(theta2+theta3)+d4*sin(theta2+theta3);
n=a2*sin(theta2)+a3*sin(theta2+theta3)-d4*cos(theta2+theta3);
k=m^2 + n^2
% 展开表达式为多项式形式
K1 = expand(m^2 + n^2)
%K = collect(K, [a1 a2 a3 d4]);
% 化简多项式
K2=simplify(K1)
% 整理多项式的项
k3=collect(K2)
结果:
k =
(a3*cos(theta2 + theta3) + d4*sin(theta2 + theta3) + a2*cos(theta2))^2 + (a3*sin(theta2 + theta3) - d4*cos(theta2 + theta3) + a2*sin(theta2))^2
K1 =
a2^2*cos(theta2)^2 + a2^2*sin(theta2)^2 + a3^2*cos(theta2)^2*cos(theta3)^2 + d4^2*cos(theta2)^2*cos(theta3)^2 + a3^2*cos(theta2)^2*sin(theta3)^2 + a3^2*cos(theta3)^2*sin(theta2)^2 + d4^2*cos(theta2)^2*sin(theta3)^2 + d4^2*cos(theta3)^2*sin(theta2)^2 + a3^2*sin(theta2)^2*sin(theta3)^2 + d4^2*sin(theta2)^2*sin(theta3)^2 + 2*a2*a3*cos(theta2)^2*cos(theta3) + 2*a2*a3*cos(theta3)*sin(theta2)^2 + 2*a2*d4*cos(theta2)^2*sin(theta3) + 2*a2*d4*sin(theta2)^2*sin(theta3)
K2 =
a2^2 + 2*cos(theta3)*a2*a3 + 2*sin(theta3)*a2*d4 + a3^2 + d4^2
k3 =
a2^2 + 2*cos(theta3)*a2*a3 + 2*sin(theta3)*a2*d4 + a3^2 + d4^2
令
H
=
(
m
2
+
n
2
−
a
2
2
−
a
3
2
−
d
4
2
)
/
2
a
2
H=\left(m^2+n^2-a_2^2-a_3^2-d_4^2\right)/2a_2
H=(m2+n2−a22−a32−d42)/2a2
则可将等式表示为:
a
3
c
3
+
d
4
s
3
=
H
a_3c_3+d_4s_3=H
a3c3+d4s3=H
可得:
θ
3
=
A
t
a
n
2
(
H
,
±
a
3
2
+
d
4
2
−
H
2
)
−
A
t
a
n
2
(
a
3
,
d
4
)
\theta_3=\mathrm{Atan2}\left(H,\pm\sqrt{a_3^2+d_4^2-H^2}\right)-\mathrm{Atan2}\left(a_3,d_4\right)
θ3=Atan2(H,±a32+d42−H2)−Atan2(a3,d4)
由于正负号的存在, θ 3 \theta_3 θ3存在两组解。
- ※ 【关于这一步是怎么来的】
我没有找到转换成反正切的具体的内容,但是这个推导过程可以参考
→→→【acosx+bsinx = c;计算x怎么求】
- matlab代码实现
%% theta3求解
%theta1的取值已经确定,但是因为theta1有两组可能得解,所以这里实际上m有两组取值,这里只给出一组
m=cos(theta1)*px+sin(theta1)*py-a1;
n=pz-d1;
H=(m^2+n^2-a2^2-a3^2-d4^2)/(2*a2);
theta3_1=atan2(H,sqrt(a3^2+d4^2-H^2))-atan2(a3,d4);
theta3_2=atan2(H,-sqrt(a3^2+d4^2-H^2))-atan2(a3,d4);
· 求解 θ 2 \theta_2 θ2
关于\theta_2$的求解,我尝试了若干种方法。
♦ 机器人学导论的方法(失败的尝试)
首先,我按照《机器人学导论》(John J Craig)这本教材中记录的方法进行尝试。
众所周知,《机器人学导论》中都是以PUMA560为案例的,而PUMA560的结构与现在常用的工业机器人的构型并不相同(主要是和我研究的机器人不同),所以并不能直接拿来用。这里是参照其步骤进行计算的。
第一步,整理机器人末端位姿描述矩阵的计算式如下
[ 3 0 T ( θ 2 ) ] − 1 6 0 T = 4 3 T ( θ 4 ) 5 4 T ( θ 5 ) 6 5 T ( θ 6 ) [{_3^0}T\left(\theta_2\right)]^{-1}\ {_6^0}T={_4^3}T\left(\theta_4\right)\ {_5^4}T\left(\theta_5\right)\ {_6^5}T\left(\theta_6\right)\ [30T(θ2)]−1 60T=43T(θ4) 54T(θ5) 65T(θ6)
令等号两边矩阵元素(1,4)和(2,4)相等,得到如下等式
(
p
z
−
d
1
)
sin
(
θ
23
)
−
a
1
cos
(
θ
23
)
−
a
2
cos
(
θ
3
)
+
.
.
.
p
x
cos
(
θ
1
)
cos
(
θ
23
)
+
p
y
sin
(
θ
1
)
cos
(
θ
23
)
=
a
3
(
p
z
−
d
1
)
cos
(
θ
23
)
+
a
1
sin
(
θ
23
)
+
a
2
sin
(
θ
3
)
−
.
.
.
p
y
cos
(
θ
1
)
cos
(
θ
23
)
+
p
x
sin
(
θ
1
)
cos
(
θ
23
)
=
−
d
4
(p_z-d_1)\sin(\theta_{23})-a_1\cos(\theta_{23})-a_2\cos(\theta_3)+...\\p_x\cos(\theta_1)\cos(\theta_{23})+p_y\sin(\theta_1)\cos(\theta_{23})=a_3\\ (p_z-d_1)\cos(\theta_{23})+a_1\sin(\theta_{23})+a_2\sin(\theta_3)-...\\p_y\cos(\theta_1)\cos(\theta_{23})+p_x\sin(\theta_1)\cos(\theta_{23})=-d_4
(pz−d1)sin(θ23)−a1cos(θ23)−a2cos(θ3)+...pxcos(θ1)cos(θ23)+pysin(θ1)cos(θ23)=a3(pz−d1)cos(θ23)+a1sin(θ23)+a2sin(θ3)−...pycos(θ1)cos(θ23)+pxsin(θ1)cos(θ23)=−d4
- 计算过程如下
syms Q1 Q2 Q3 Q4 Q5 Q6 d1 d4 dt a1 a2 a3 nx ny nz ox oy oz ax ay az px py pz
%ZK-500连杆间齐次变换矩阵
T_01 =[ cos(Q1), -sin(Q1), 0, 0
sin(Q1), cos(Q1), 0, 0
0, 0, 1, d1
0, 0, 0, 1];
T_12 =[ cos(Q2), -sin(Q2), 0, a1
0, 0, -1, 0
sin(Q2), cos(Q2), 0, 0
0, 0, 0, 1];
T_23 =[ cos(Q3), -sin(Q3), 0, a2
sin(Q3), cos(Q3), 0, 0
0, 0, 1, 0
0, 0, 0, 1];
T_34 =[ cos(Q4), -sin(Q4), 0, a3
0, 0, -1, -d4
sin(Q4), cos(Q4), 0, 0
0, 0, 0, 1];
T_45 =[ cos(Q5), -sin(Q5), 0, 0
0, 0, 1, 0
-sin(Q5), -cos(Q5), 0, 0
0, 0, 0, 1];
T_56 =[ cos(Q6), -sin(Q6), 0, 0
0, 0, -1, 0
sin(Q6), cos(Q6), 0, 0
0, 0, 0, 1];
T_6t=[ 1 0 0 0
0 1 0 0
0 0 1 dt
0 0 0 1];
% 计算T_06和T_16的逆矩阵
T_06=[nx ox ax px;ny oy ay py;nz oz az pz;0 0 0 1];
T_03=T_01*T_12*T_23;
T_36=T_34*T_45*T_56;
% 计算T_01的逆矩阵
T_03_inv = inv(T_03);
%输出结果并化简
T_left=T_03_inv*T_06;
disp("等式左边矩阵:")
%T_left=simplify(T_left)
T_left
disp("等式右边矩阵:")
simplify(T_36)
结果如下
T_left =
[nz*cos(Q2)*sin(Q3) + nz*cos(Q3)*sin(Q2) - nx*cos(Q1)*sin(Q2)*sin(Q3) - ny*sin(Q1)*sin(Q2)*sin(Q3) + nx*cos(Q1)*cos(Q2)*cos(Q3) + ny*cos(Q2)*cos(Q3)*sin(Q1),
oz*cos(Q2)*sin(Q3) + oz*cos(Q3)*sin(Q2) - ox*cos(Q1)*sin(Q2)*sin(Q3) - oy*sin(Q1)*sin(Q2)*sin(Q3) + ox*cos(Q1)*cos(Q2)*cos(Q3) + oy*cos(Q2)*cos(Q3)*sin(Q1),
az*cos(Q2)*sin(Q3) + az*cos(Q3)*sin(Q2) - ay*sin(Q1)*sin(Q2)*sin(Q3) + ax*cos(Q1)*cos(Q2)*cos(Q3) + ay*cos(Q2)*cos(Q3)*sin(Q1) - ax*cos(Q1)*sin(Q2)*sin(Q3),
pz*sin(Q2 + Q3) - d1*sin(Q2 + Q3) - a1*cos(Q2 + Q3) - a2*cos(Q3) + (px*cos(Q1 + Q2 + Q3))/2 + (py*sin(Q1 + Q2 + Q3))/2 + (px*cos(Q2 - Q1 + Q3))/2 - (py*sin(Q2 - Q1 + Q3))/2]
[nz*cos(Q2)*cos(Q3) - nz*sin(Q2)*sin(Q3) - ny*cos(Q2)*sin(Q1)*sin(Q3) - ny*cos(Q3)*sin(Q1)*sin(Q2) - nx*cos(Q1)*cos(Q2)*sin(Q3) - nx*cos(Q1)*cos(Q3)*sin(Q2),
oz*cos(Q2)*cos(Q3) - oz*sin(Q2)*sin(Q3) - oy*cos(Q2)*sin(Q1)*sin(Q3) - oy*cos(Q3)*sin(Q1)*sin(Q2) - ox*cos(Q1)*cos(Q2)*sin(Q3) - ox*cos(Q1)*cos(Q3)*sin(Q2),
az*cos(Q2)*cos(Q3) - az*sin(Q2)*sin(Q3) - ax*cos(Q1)*cos(Q2)*sin(Q3) - ax*cos(Q1)*cos(Q3)*sin(Q2) - ay*cos(Q2)*sin(Q1)*sin(Q3) - ay*cos(Q3)*sin(Q1)*sin(Q2),
pz*cos(Q2 + Q3) - d1*cos(Q2 + Q3) + a1*sin(Q2 + Q3) + a2*sin(Q3) + (py*cos(Q1 + Q2 + Q3))/2 - (px*sin(Q1 + Q2 + Q3))/2 - (py*cos(Q2 - Q1 + Q3))/2 - (px*sin(Q2 - Q1 + Q3))/2]
[
nx*sin(Q1) - ny*cos(Q1),
ox*sin(Q1) - oy*cos(Q1),
ax*sin(Q1) - ay*cos(Q1),
px*sin(Q1) - py*cos(Q1)
]
[0,0,0, 1]
等式右边矩阵:
[
cos(Q4)*cos(Q5)*cos(Q6) - sin(Q4)*sin(Q6),
- cos(Q6)*sin(Q4) - cos(Q4)*cos(Q5)*sin(Q6),
cos(Q4)*sin(Q5),
a3
]
[
cos(Q6)*sin(Q5),
-sin(Q5)*sin(Q6),
-cos(Q5),
-d4]
[cos(Q4)*sin(Q6) + cos(Q5)*cos(Q6)*sin(Q4),
cos(Q4)*cos(Q6) - cos(Q5)*sin(Q4)*sin(Q6),
sin(Q4)*sin(Q5),
0]
[0, 0, 0, 1]
然后让ChatGPT帮我化简

最后结果就是这个
(pz - d1)*sin(Q23) - a1*cos(Q23) - a2*cos(Q3) + px*cos(Q1)*cos(Q23) + py*sin(Q1)*cos(Q23)=a3;
(pz - d1)*cos(Q23) + a1*sin(Q23) + a2*sin(Q3) - py*cos(Q1)*cos(Q23) + px*sin(Q1)*cos(Q23)=-d4;
此时等式中未知的只有 s 23 s_{23} s23和 c 23 c_{23} c23,将其设为未知数,(理论上)就可以解出来 θ 2 + θ 3 \theta_2+\theta_3 θ2+θ3
设
m
1
=
c
1
p
x
+
s
1
p
y
−
a
1
m
2
=
p
z
−
d
1
m
3
=
a
3
+
a
2
c
3
m_1=c_1p_x+s_1p_y-a_1\\ m_2=p_z-d_1\\ m_3=a_3+a_2c_3
m1=c1px+s1py−a1m2=pz−d1m3=a3+a2c3
n 1 = − c 1 p y − s 1 p x − d 1 n 2 = a 1 n 3 = − d 4 − a 2 s 3 n_1=-c_1p_y-s_1p_x-d_1\\ n_2=a_1\\ n_3=-d_4-a_2s_3 n1=−c1py−s1px−d1n2=a1n3=−d4−a2s3
将方程组整理为
m
1
c
23
+
m
2
s
23
=
m
3
n
1
c
23
+
n
2
s
23
=
n
3
m_1c_{23}+m_2s_{23}=m_3\\ n_1c_{23}+n_2s_{23}=n_3
m1c23+m2s23=m3n1c23+n2s23=n3
解得
x = s 23 = ( m 1 n 3 − m 3 n 1 ) / ( m 1 n 2 − m 2 n 1 ) y = c 23 = − ( m 2 n 3 − m 3 n 2 ) / m 1 n 2 − m 2 n 1 ) x=s_{23}=(m_1n_3-m_3n_1)/(m_1n_2-m_2n_1)\\ y=c_{23}=-(m_2n_3-m_3n_2)/m_1n_2-m_2n_1) x=s23=(m1n3−m3n1)/(m1n2−m2n1)y=c23=−(m2n3−m3n2)/m1n2−m2n1)
于是
θ
23
=
A
t
a
n
2
(
y
,
x
)
\theta_{23}=\mathrm{Atan2}(y,x)
θ23=Atan2(y,x)
然后再根据 θ 3 \theta_3 θ3的取值得到 θ 2 \theta_2 θ2
【!!??】起来没问题,但是算出来的结果却和预设的值不同,不知道是哪里出了问题,如果有大佬看出来了希望能指点一二。
- matlab代码实现
m1=cos(theta1)*px+sin(theta1)*py-a1;
m2=pz-d1;
m3=a3+a2*cos(theta3);
n1=-cos(theta1)*py-sin(theta1)*px+pz-d1;
n2=a1;
n3=-d4-a2*sin(theta1);
x = (m1*n3 - m3*n1)/(m1*n2 - m2*n1);
y = -(m2*n3 - m3*n2)/(m1*n2 - m2*n1);
theta23=atan2(y,x)-pi/2;%这里减pi/2因为在DH参数中theta2补偿了pi/2
♦ 参考的文章中的方法(失败的尝试)
也就是前面提到的这篇文章:
→→→【MD-H模型运动学正解、逆解及姿态角的解算验证】
这篇文章中作者没有给出具体的推导过程,只给了matlab代码,代码如下
%theta2
c3=cosd(Theta3);s3=sind(Theta3);
g1=f2-d6*f1;
g2=f3-d6*az;
g3=a4*c3-d4*s3+a3;
Theta2=(atan2(g3,sqrt(g1^2+g2^2-g3^2))-atan2(g2,g1))*180/pi;
————————————————
版权声明:本文为CSDN博主「Vittore-Li」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/Vittore_Li/article/details/123185721
【!】注意,这篇文章作者的DH参数的定义和我是不一样的,我的a1=他的a2,我的a2=他的a3,我的a3=他的a4,另外他的DH模型的连杆的Z轴和我的方向是相反的,不知道会在求解中有什么影响。
我看了半天没看明白这是怎么来的,然后直接运行得到的结果也不正确(在针对我的DH模型做了相应修改后运行的)。
如果有哪个大佬知道作者用的是什么方法希望不吝赐教!(抱拳)
♦ 一个大佬的论文的方法(可以得到正确结果的方法)
是的,就是我前面(上一篇)说的那个大佬的论文,其实我前面的过程基本(或者说全部)也是按照大佬的步骤写的,只是加上了我的理解和验证过程。
大佬就是不一样,用的方法都是我没见过的。。。
机器人末端位置(坐标系6的原点)如下:
p x = a 1 c 1 + a 3 c 1 c 23 + d 4 c 1 s 23 + a 2 c 1 c 2 p y = a 1 s 1 + a 3 s 1 c 23 + d 4 s 1 s 23 + a 2 c 2 s 1 p z = d 1 + a 2 s 2 + a 3 s 23 − d 4 c 23 p_x=a_1c_1+a_3c_1c_{23}+d_4c_1s_{23}+a_2c_1c_2\\ p_y=a_1s_1+a_3s_1c_{23}+d_4s_1s_{23}+a_2c_2s_1\\ p_z=d_1+a_2s_2+a_3s_{23}-d_4c_{23} px=a1c1+a3c1c23+d4c1s23+a2c1c2py=a1s1+a3s1c23+d4s1s23+a2c2s1pz=d1+a2s2+a3s23−d4c23
整理可得:
p x c 1 − a 1 = a 3 c 23 + d 4 s 23 + a 2 c 2 p y s 1 − a 1 = a 3 c 23 + d 4 s 23 + a 2 c 2 p z − d 1 = a 2 s 2 + a 3 s 23 − d 4 c 23 \frac{p_x}{c_1}-a_1=a_3c_{23}+d_4s_{23}+a_2c_2\\ \frac{p_y}{s_1}-a_1=a_3c_{23}+d_4s_{23}+a_2c_2\\ p_z-d_1=a_2s_2+a_3s_{23}-d_4c_{23} c1px−a1=a3c23+d4s23+a2c2s1py−a1=a3c23+d4s23+a2c2pz−d1=a2s2+a3s23−d4c23
记
k 1 = p x c 1 − a 1 k 2 = p z − d 1 k_1=\frac{p_x}{c_1}-a_1 {k_2=p}_z-d_1 k1=c1px−a1k2=pz−d1
得到:
k 1 − a 2 c 2 = a 3 c 23 + d 4 s 23 k 2 − a 2 s 2 = a 3 s 23 − d 4 c 23 k_1-a_2c_2=a_3c_{23}+d_4s_{23}\\ k_2-a_2s_2=a_3s_{23}-d_4c_{23} k1−a2c2=a3c23+d4s23k2−a2s2=a3s23−d4c23
求平方和:
a 3 2 + d 4 2 = k 1 2 + k 2 2 + a 2 2 − 2 k 1 a 2 c 2 − 2 k 2 a 2 s 2 a_3^2+d_4^2=k_1^2+k_2^2+a_2^2-2k_1a_2c_2-2k_2a_2s_2 a32+d42=k12+k22+a22−2k1a2c2−2k2a2s2
记
k 3 = ( k 1 2 + k 2 2 + a 2 2 − a 3 2 − d 4 2 ) / 2 a 2 k_3=\left(k_1^2+k_2^2+a_2^2-a_3^2-d_4^2\right)/2a_2 k3=(k12+k22+a22−a32−d42)/2a2
则:
k
1
c
2
+
k
2
s
2
=
k
3
k_1c_2+k_2s_2=k_3
k1c2+k2s2=k3
解得:
θ
2
=
A
t
a
n
2
(
k
3
,
±
k
1
2
+
k
2
2
−
k
3
2
)
−
A
t
a
n
2
(
k
1
,
k
2
)
\theta_2=\mathrm{Atan2}\left(k_3,\pm\sqrt{k_1^2+k_2^2-k_3^2}\right)-\mathrm{Atan2}\left(k_1,k_2\right)
θ2=Atan2(k3,±k12+k22−k32)−Atan2(k1,k2)
- matlab代码实现
k1=px/cosd(theta(1))-a1;
k2=pz-d1;
k3=(k1^2+k2^2+a2^2-a3^2-d4^2)/(2*a2);
theta2_1=atan2(k3,sqrt(k1^2+k2^2-k3^2))-atan2(k1,k2)-pi/2;
theta2_2=atan2(k3,-sqrt(k1^2+k2^2-k3^2))-atan2(k1,k2)-pi/2;
❤ 2023.6.21 ❤
以上就是用代数解的方法求前三个轴的角度,按照一般流程,这个时候应该求后四个轴了,但是作为一篇总结方法型的文章,我是不满足于只记录一种实现方法的。
在学习了师弟的方法之后,我觉得用集合法解前三个轴应该是更简单的,至少和脑筋急转弯一样的代数法相比更好理解。
○ 几何解求 θ 1 \theta_1 θ1、 θ 2 \theta_2 θ2、 θ 3 \theta_3 θ3
· 求解 θ 1 \theta_1 θ1
由机器人示意图可知,此构型的机器人,杆1、杆2、杆3组成的机构在同一竖直平面内,同时机器人末端为杆4、杆5、杆6坐标系的共同原点。由此可知,已知机器人末端坐标 ( p x , p y , p z ) \left(p_x,p_y,p_z\right) (px,py,pz)即可求得轴1的转角 θ 1 \theta_1 θ1
θ
1
=
A
t
a
n
2
(
p
y
,
p
x
)
\theta_1=\mathrm{Atan2}\left(p_y,p_x\right)
θ1=Atan2(py,px)
甚至不用考虑多解的情况