LabVIEW开发微控制器控制的并行机器人的实时视觉图像处理
通过相机视觉,以对目标物体的不同颜色进行分类,并与平行机器人一起拾取和放置物体。通过使用MATLAB Simulink模拟合适的机器人工作空间来研究使用相机的效率和机器人的准确性。机械臂以使用运动学计算在实践中使用。由Arduino微控制器自动控制的并行机器人原型进行运动分析,进行机器人运动学,以及使用相机和NI视觉LabVIEW来检查和分析目标对象不同颜色的视觉分析。
相机视觉和机械臂一起设置,以检查三个不同颜色的球形金属标本:蓝色、黄色和红色。平行机器人将与视觉系统一起拾取工件并将其移动到各个位置。
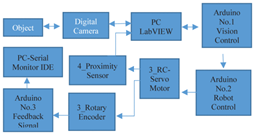
目前,大多数工业工厂都在操作中使用机器人代替体力劳动,目的是减少生产时间,提高生产率,准确性,并替代超出人类限制的操作,但对于小型工厂,仍然有一些过程是手动执行的。人类劳动是与机器人一起工作,例如,在将被检查的工件发送给机器人进行下一个过程之前,根据工件的性质,尺寸,颜色和缺陷检查和分离工件的过程。用人眼检测工件的速度、准确性和精度仍然有限,人眼的疲劳可能导致失真。基于这个问题,涉及了一种利用机器视觉系统检测目标物体颜色并控制机械机械臂拾取物体并将其放置在指定位置的技术。它使用NI LabVIEW软件,将控制信号发送至Arduino Uno微控制器,该微控制器是具有3个控制单元的并行机械臂的主控制板。使用RC伺服电机,机器人手臂移动到指定位置并拾取和放置目标物体。数据采集可以通过计算机通过串行端口完成。LabVIEW软件控制数据传输,并通过计算机显示数据,以控制数字和模拟操作。借助LabVIEW软件,设计、编程以及使用命令来通信和控制微控制器的功能非常简单方便。
开发了一种使用相机与机械臂一起工作来拾取和放置物体的技术。一个新的原型平行机器人的建造是为了获得合适尺寸的机器人进行实验,因为平行机器人是工业工厂喜欢用于工作的机器人。这是一个小型机器人,机器人的手臂移动迅速,通过设计平行机器人的机构和工作空间分析与机器人运动学理论。LabVIEW程序能够通过对对象进行颜色处理,来检测物体的不同颜色,并向Arduino微控制器板发送可验证的控制信号,以控制机器人执行器的运动位置。
并联机器人、视觉系统电子装置及微控制器。它代表了视觉系统、微控制器、传感器和并联机器人部件的主要组件。
为了将LabVIEW中的颜色检测为静态图像,使用视觉助手工具IMAQ Color Match VI。色彩处理VI对彩色图像执行基本处理。使用这些VI计算彩色图像的直方图;对彩色图像应用查找;更改与彩色图像关联的亮度、对比度和伽玛信息;和阈值彩色图像查找图像中多个区域的颜色内容与输入色谱定义的颜色内容之间的匹配。色谱是从IMAQColor Learn VI输出的。
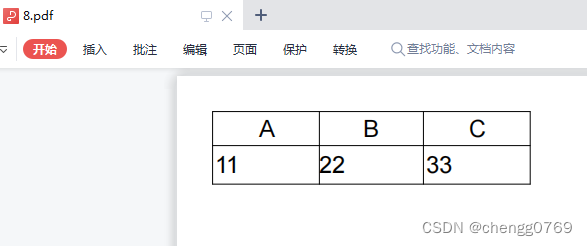
LabVIEW视觉颜色处理增益检测实验本步骤是通过规定机器视觉系统使用颜色处理技术检查目标对象的颜色阈值特性的条件,确定视觉系统目标对象的色差检测精度的实验。对于目标物体尺寸直径30毫米,3件具有不同颜色的物体,红色,黄色和蓝色。通过实验程序对每种颜色进行10次实验。

LabVIEW视觉前面板显示蓝色颜色匹配和增益检测

LabVIEW视觉前面板显示黄色颜色匹配和增益检测

在设计原型机器人并使用机器视觉系统控制机器人操作的过程中,通过根据四个实验场景的原型机器人的实际实验结果,使用微控制器参考开发接口程序的设计,由于各种潜在因素,结果在某些时候会与规格略有偏差。然而,实际结果与从运动学仿真中获得的目标实验结果一致。它使我们能够了解和了解机器人在每种情况下和机器人关节运动的所有维度以及设计视觉系统的参数条件中的工作方式。我们也可以使用这种方法来开发不同类型的机器人。这是为了证明机器人设计和选择的局限性,或者开发现有的机器人以充分发挥其潜力。下一步是通过安装视觉控制信号和机器人控制信号等附加设备,以及使用AI和IoT系统接收来自各种传感器的信号来开发更高效的机器人。减少使用安装空间有限的信号电缆。并增加了数据采集的便利性和速度,进一步优化了对机器人运动的控制。