原理
AVL 树是一种平衡搜索二叉树,得名于其发明者的名字( Adelson-Velskii 以及 Landis)。(可见名字长的好处,命名都能多占一个字母出来)。在搜索树的前提下平衡搜索二叉树还定义如下:
- 左右子树的高度差小于等于 1。
- 其每一个子树均为平衡二叉树。
我们以SGI版本AVL树
先来查看树中每个结点内容。
template<class K,class V>
struct AVLTreeNode
{
AVLTreeNode* _left;//左子树
AVLTreeNode* _right;//右子树
AVLTreeNode* _parent;//父节点
pair<K, V> _kv;//数据存储内容
int _bf;//平衡因子
AVLTreeNode(pair<K, V>kv=pair<K, V>())//默认赋值构造
:_kv(kv)
, _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
,_bf(0)
{}
};左子树与右子树指针我们不做过多介绍。
我们存储AVL树是一种存储key_value数据的树,所以我们使用pair库中类型存储数据。
让我们看看平衡因子是什么:
平衡因子
某个结点的右子树的高度减去左子树的高度得到的差值。
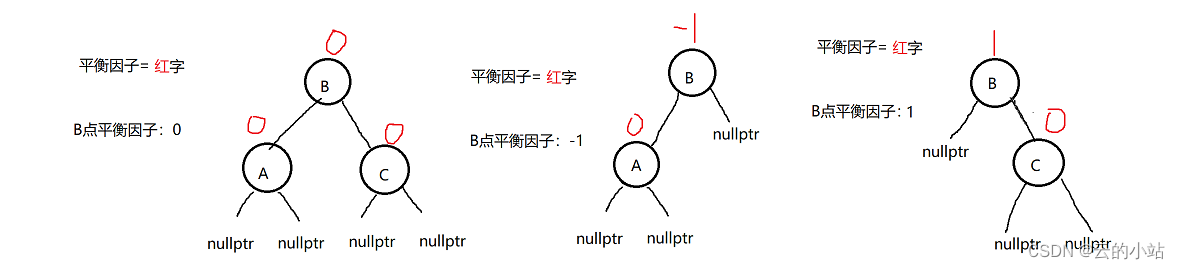
平衡因子在[-1,1]之间都是属于平衡的平衡搜索二叉树,每个结点都需要符合这个要求
在插入的过程中我们会破坏平衡,这个时候就需要对树结点进行转至操作。
AVL树的插入insert
和普通搜索二叉树一样,先要寻找插入的位置。
bool Insert(const pair<K, V>& kv)
{
if (_root == nullptr)
{
_root = new Node(kv);
}
else
{
Node* parent = nullptr;//保存上级指针,我们链接都是cur走到空指针创建结点给cur
//但是这个新的结点需要被链接到树中,我们不可以对
//nullptr进行访问上级的数据,所以我们必须留一个parent
//用来链接新的结点。
Node* cur = _root;
while (cur)
{
parent = cur;
if (cur->_kv.first > kv.first)
{
cur = cur->_left;//新数据小于当前数据,向cur的左边走
}
else if (cur->_kv.first < kv.first)
{
cur = cur->_right;//新数据大于当前数据,向cur的右边走
}
else
{
return false;//数据相同退出,并返回false
}
}
cur = new Node(kv);//cur到了nullptr,创建新的结点。
//新结点链接到树
if (parent->_kv.first <cur->_kv.first)
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
cur->_parent = parent;//处理新结点的_parent插入结点后我们需要修改平衡因子,确保插入数据后我们的树依旧是AVL树。
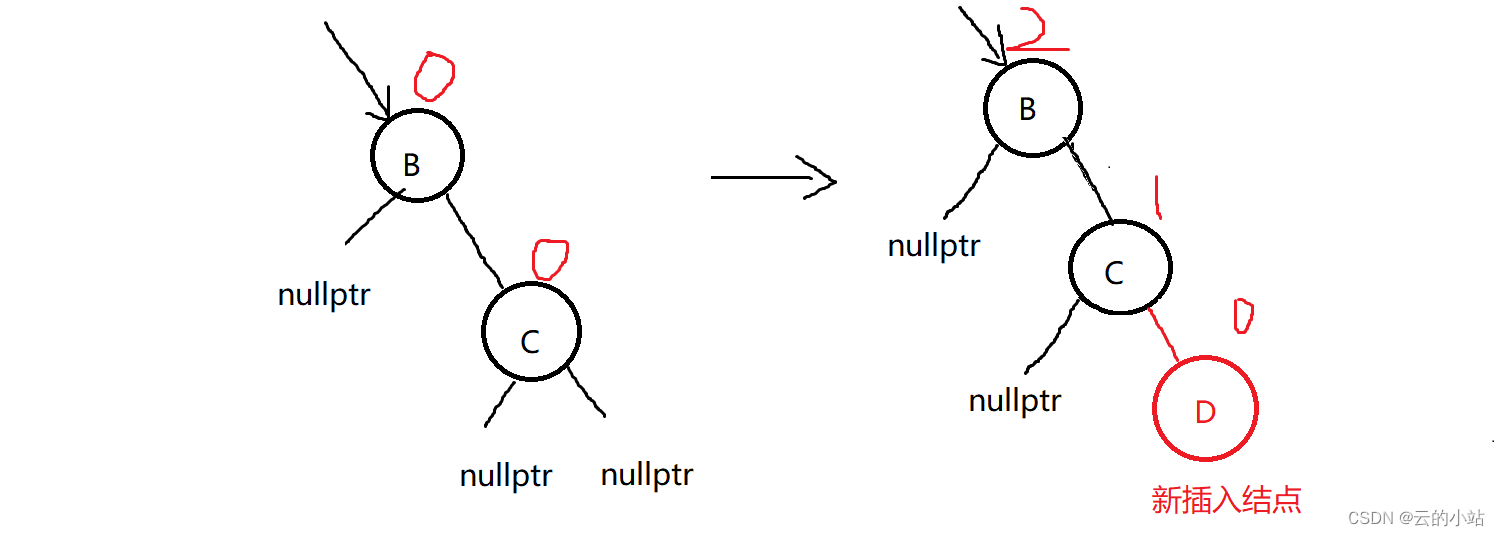
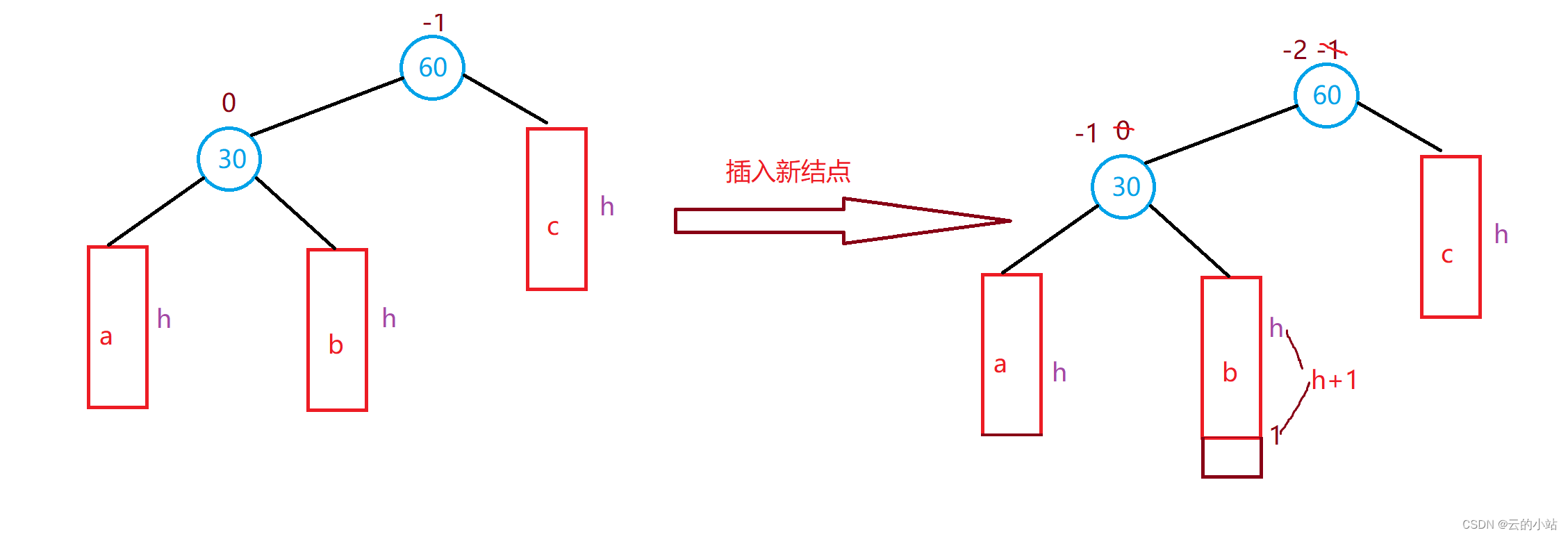
更新平衡因子规则:
- 新增在右,parent->bf+ +;新增在左,parent->bf--;
- 更新后,parent->bf == 1 or -1,说明parent插入前的平衡因子是0,说明左右子树高度相等,插入后有一边高,parent高度变了,该节点插入稍稍改变平衡,需要继续往上更新平衡因子。
- 重新后,parent->bf == 0说parent插入前的平衡因子是1 or -1,说明左右子树一边高一边低,插入后两边一样高,插入填上了矮了那边,parent所在子树高度不变,不需要继续往上更新
- 更新后,parent->bf == 2 or -2,说明parent插入前的平衡因子是1 or -1,已经平衡临界值,插入变成2 or -2,打破平衡,parent所在子树需要旋转处理
- 更新后,parent->bf > 2 r< -2的值,不可能,如果存在,则说明插入前就不是AVL树,需要去检查之前操作的问题,不需要再去考虑现在代码的问题了。
while (parent)
{
if (parent->_right == cur)//根结点(praent)的右子树(cur)插入了一个结点当前根结点平衡因子++
{
++parent->_bf;
}
else /*if() 可以不写这个*///根结点(praent)的左子树(cur)插入了一个结点当前根结点平衡因子--
{
--parent->_bf;
}
if (parent->_bf == 0)//修改更新平衡因子后,查看当前平衡因子,为0代表根补齐了该根的低子树
//parent所在子树高度不变,不需要继续往上更新
{
break;
}
else if (abs(parent->_bf) == 1)//parent原本为0的平衡因子被改变,高度变高了,parent左右被
//该节点插入稍稍改变平衡,需要继续往上更新平衡因子。
{
cur = parent;
parent = parent->_parent;
}
else if (abs(parent->_bf) == 2)//说明parent插入前的平衡因子是1 or -1,已经平衡临界值,插
//入变成2 or -2,打破平衡,parent所在子树需要旋转处理
{
//平衡被破坏。
}
else
{
std::cout << "AVL fail\n";
assert(false);
}
} 这既是转至: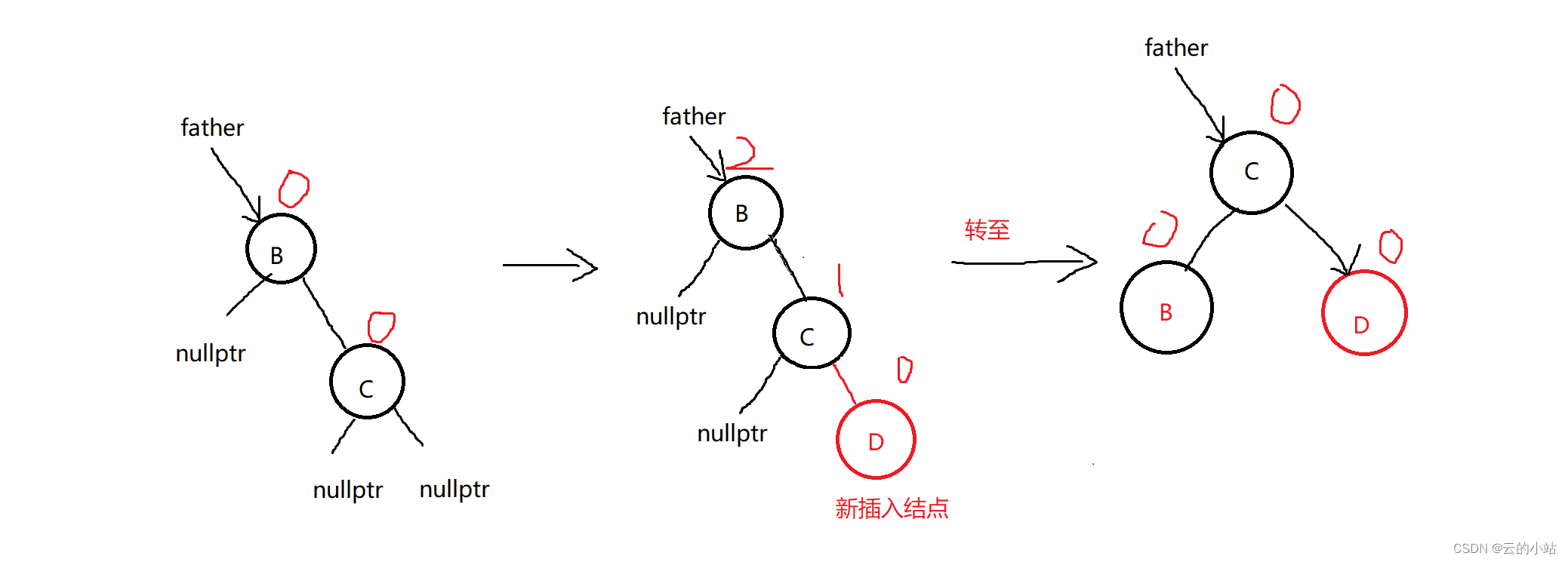
但是不平衡的情况有无数种。
我们向大佬学习,得出4个旋转大规律:
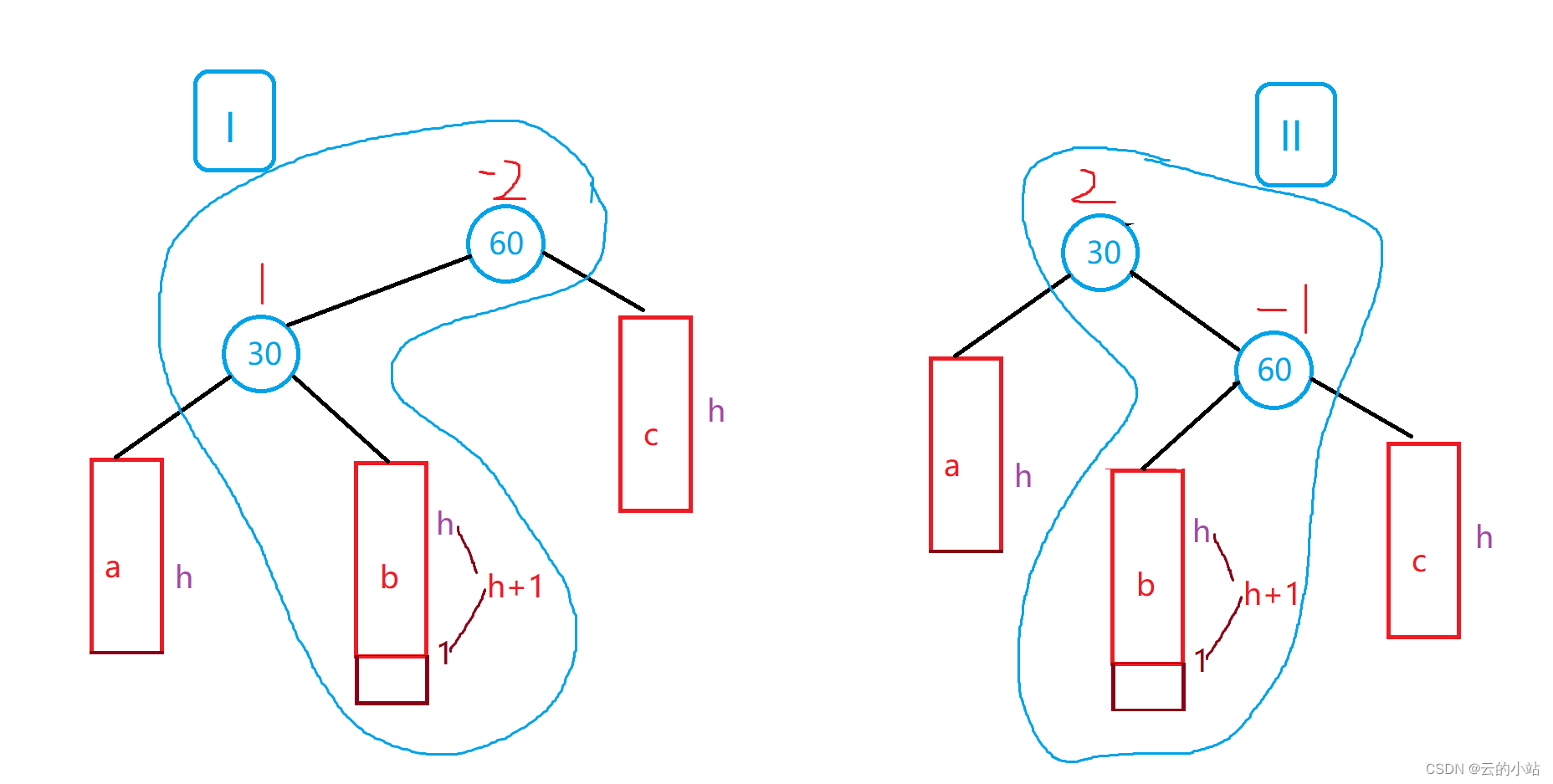
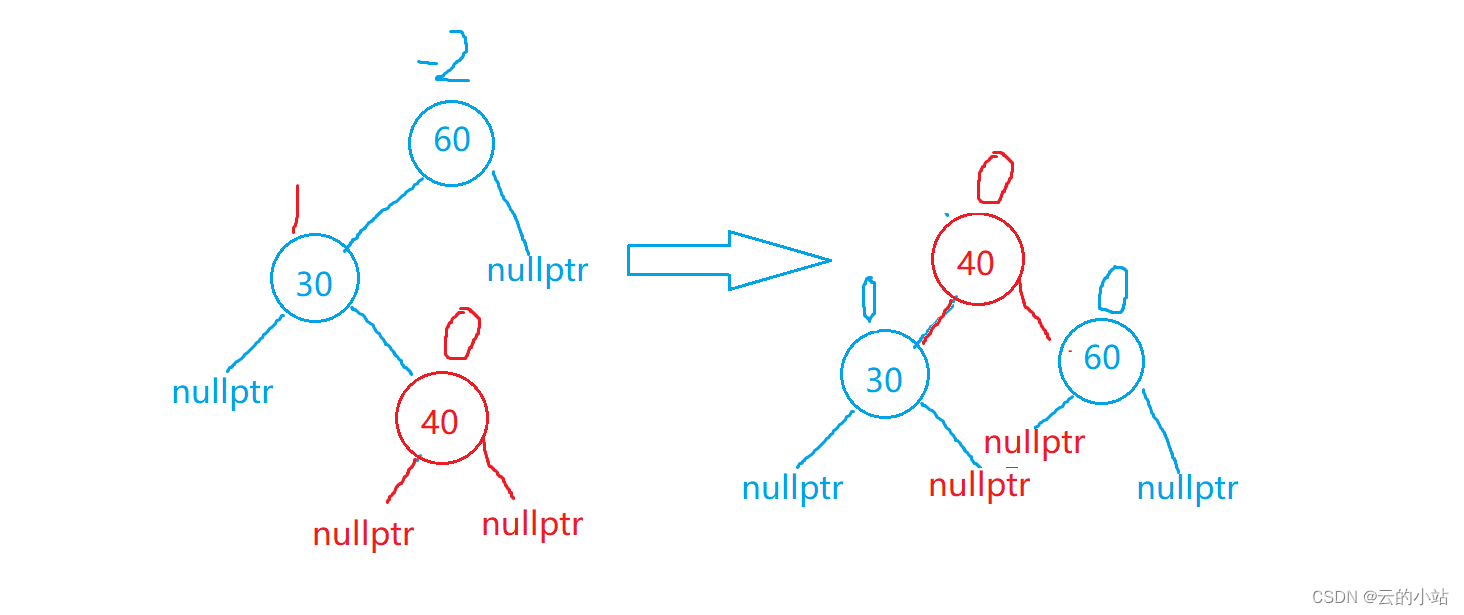
1. 新节点插入较高左子树的左侧---左左:右单旋

h为子树高度。
当cur->bf==-1&&parent==-2是发生右单旋。
左左的意思是插入数据在parent的左子树的左子树上。
右单旋:以60结点为中心,向右旋转AVL树,允许h=0;
观察图像,我们发现就是改变链接关系,
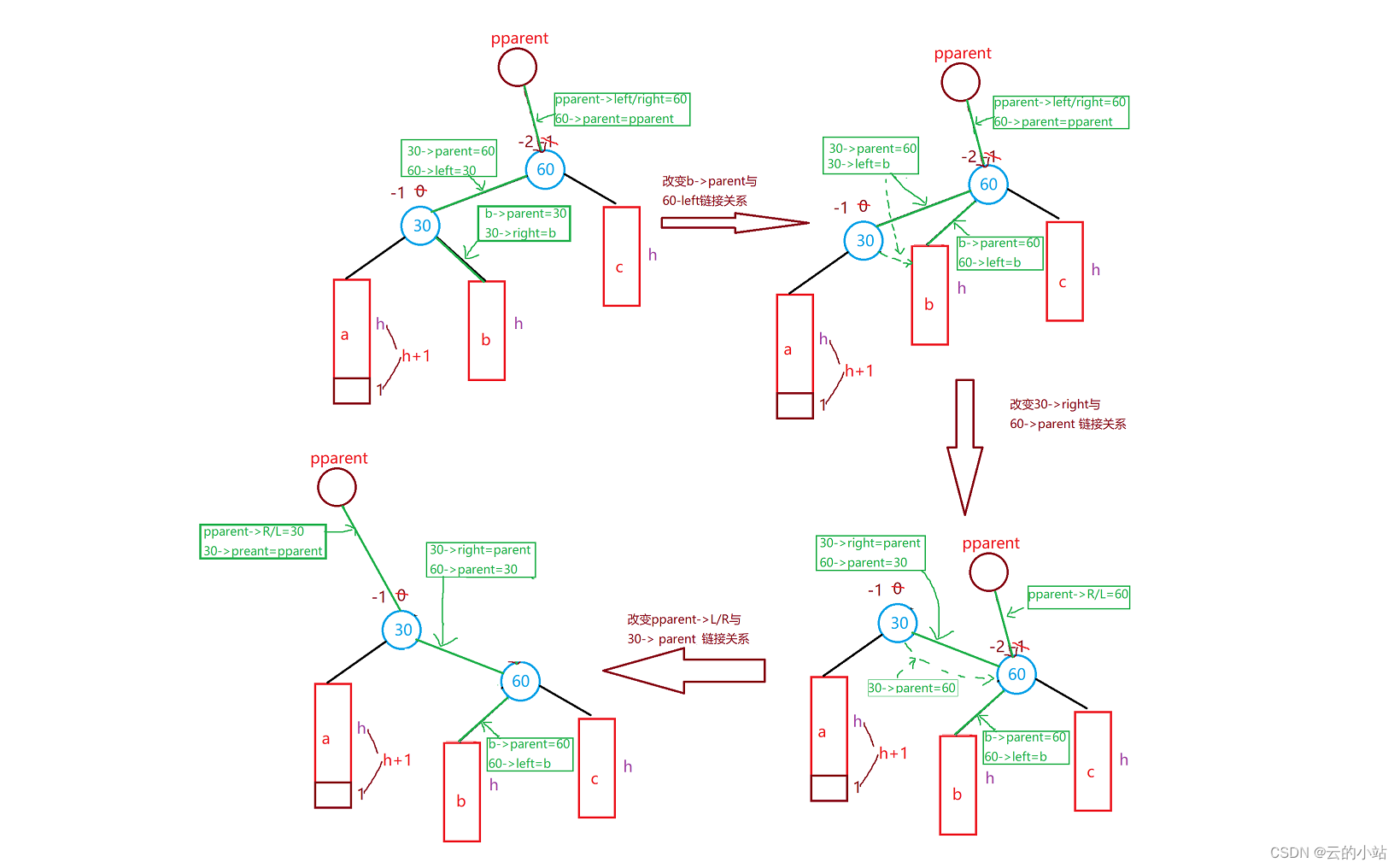
这里有2个小细节点,
- b允许为空,所以b的parent操作前需要判断b是否为nullptr
- 如果60就是整棵AVL树的根就需要改变root指向30,并且将30的parent置空
在旋转结束以后将cur与parent结点的bf置为0
完整代码:
void RotateR(Node* parent)
{
Node* subL = parent->_right;
Node* subLR = subL->_right;
parent->_left = subLR;
if (subLR)
{
subLR->_parent = parent;
}
Node* pparent = parent->_parent;
parent->_parent = subL;
subL->_right = parent;
if (_root == parent)
{
_root = subL;
subL->_parent == nullptr;
}
else
{
if (pparent->_left == parent)
{
pparent->_left = subL;
}
else
{
pparent->_right = subL;
}
subL->_parent = pparent;
}
subL->_bf = 0;
parent->_bf = 0;
}2.新节点插入较高右子树的右侧---右右:左单旋
原理与右单旋一样。
查看代码
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
if (subRL)
{
subRL->_parent = parent;
}
Node* pparent = parent->_parent;
parent->_parent = subR;
subR->_left = parent;
if (_root == parent)
{
_root = subR;
subR->_parent == nullptr;
}
else
{
if (pparent->_left == parent)
{
pparent->_left = subR;
}
else
{
pparent->_right = subR;
}
subR->_parent = pparent;
}
subR->_bf = 0;
parent->_bf = 0;
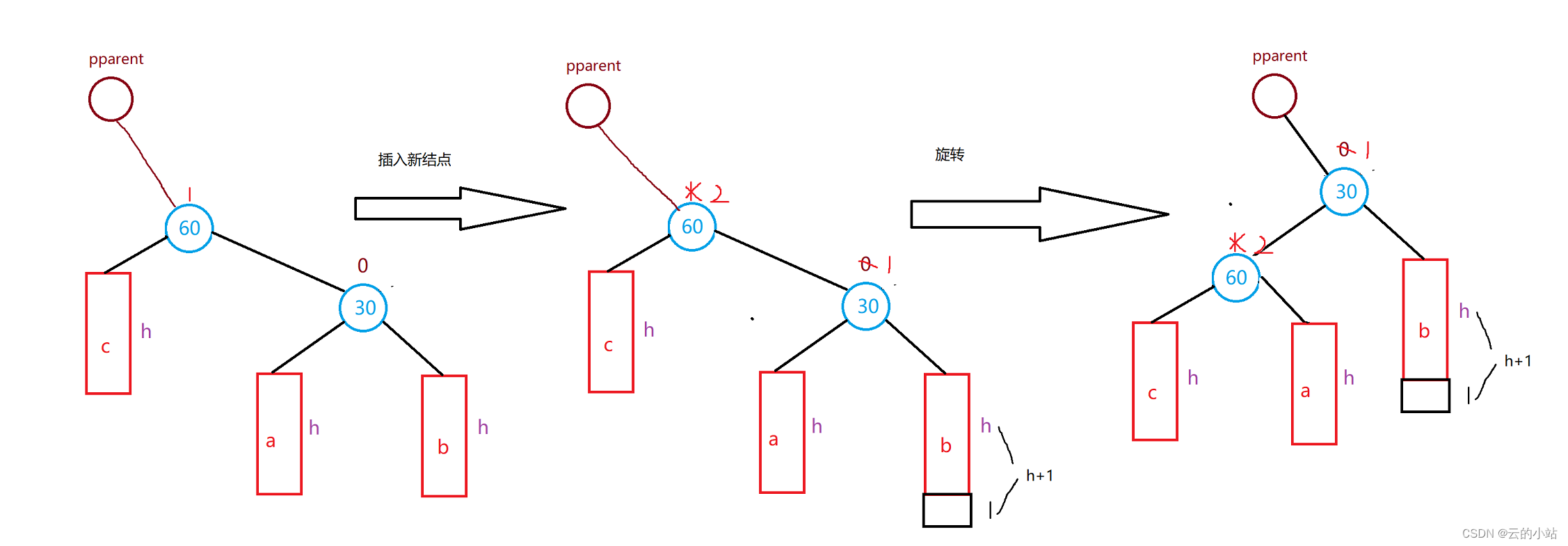
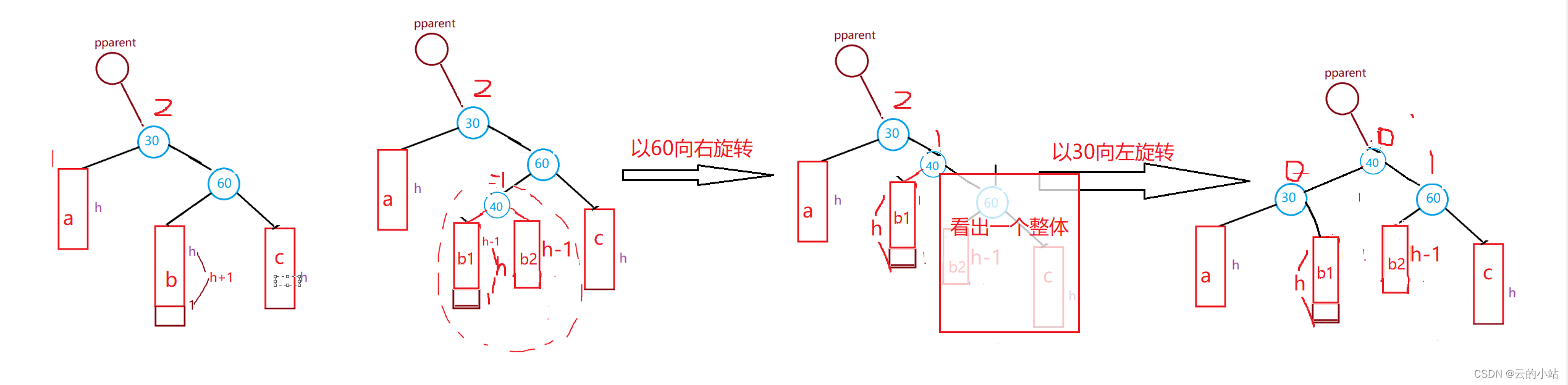
}新节点插入较高左子树的右侧---左右:先左单旋再右单旋
什么意思呢?就是插入到了parent->left->right子树上
如果这样的情况只用右单旋。会发生什么呢?
该破坏平衡依旧破坏平衡,用左旋就是I变2一样的。
所以这时候我们需要左右旋一起用。
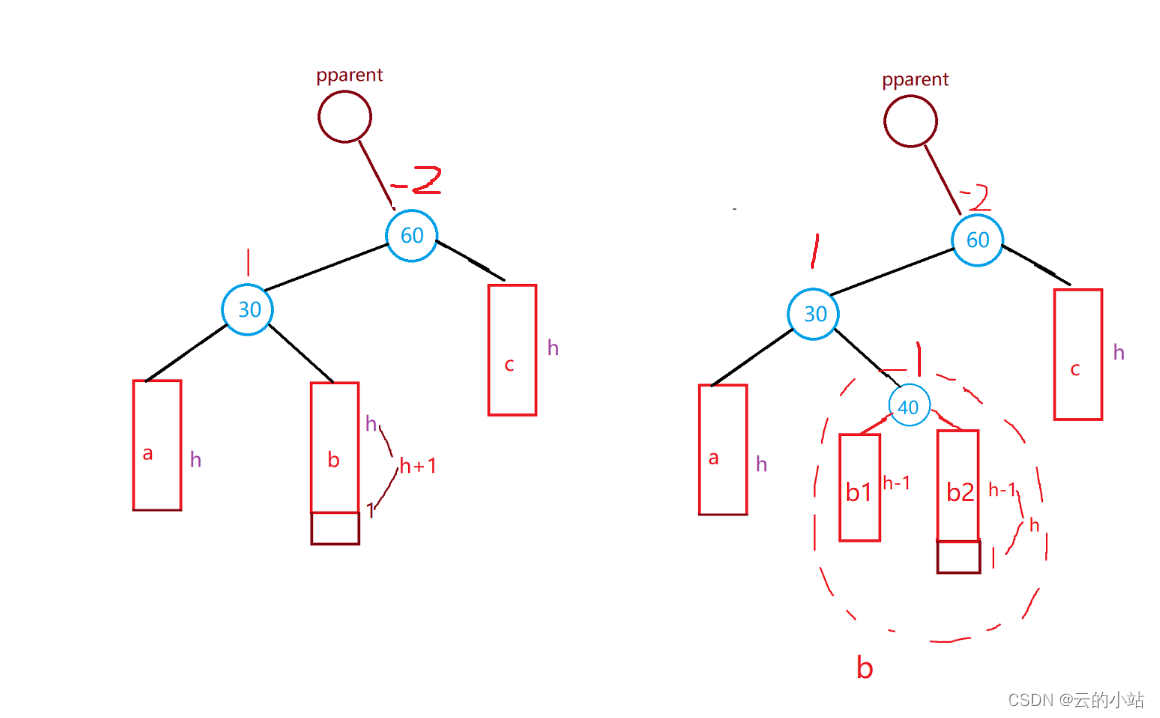
我们将30结点的右子树再一次拆分->40根结点+左右子树。
我们需要先以30结点左旋该子树。
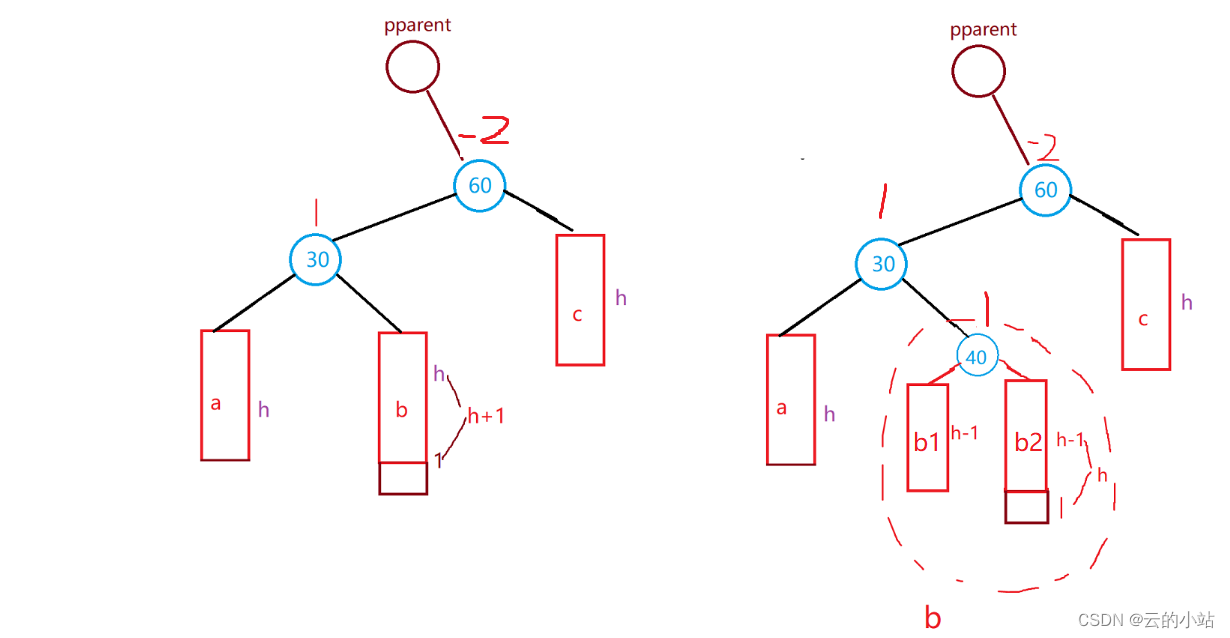
在根据60结点做右旋旋转,我们把40的左子树看成一个整体
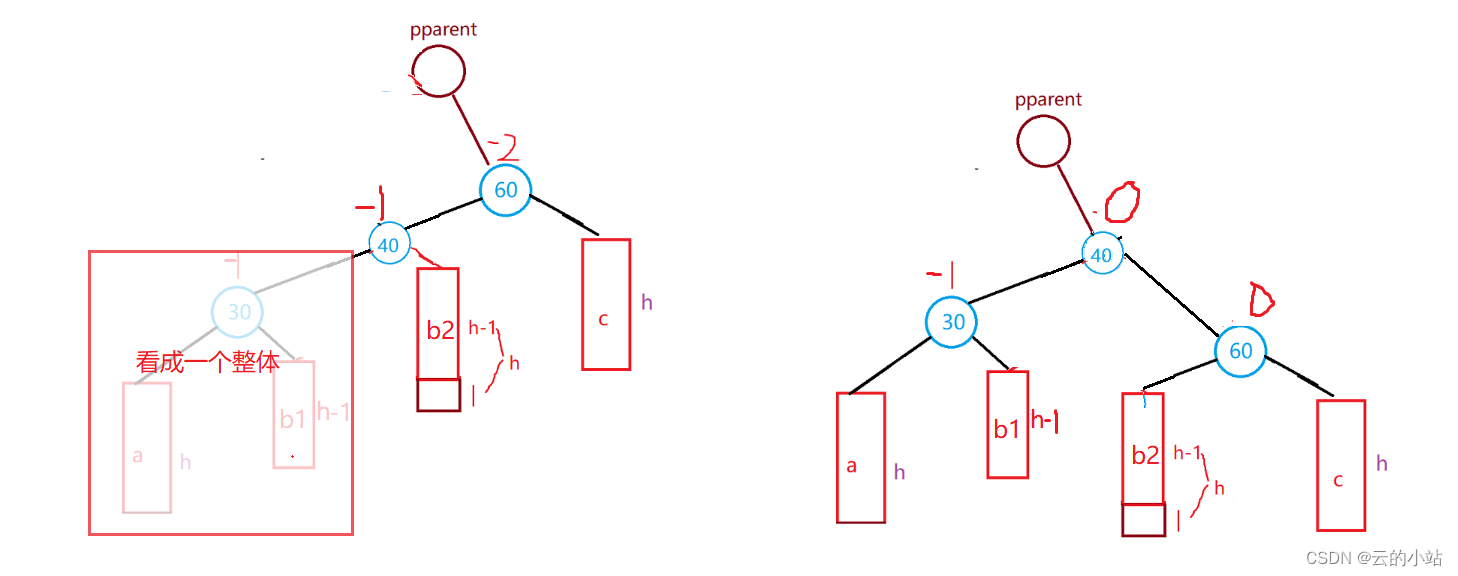
然后重新定义40、60、30的平衡因子。
这里我们定义平衡因子又有讲究,我们要观察插入后旋转前40结点的平衡因子。
三种情况:
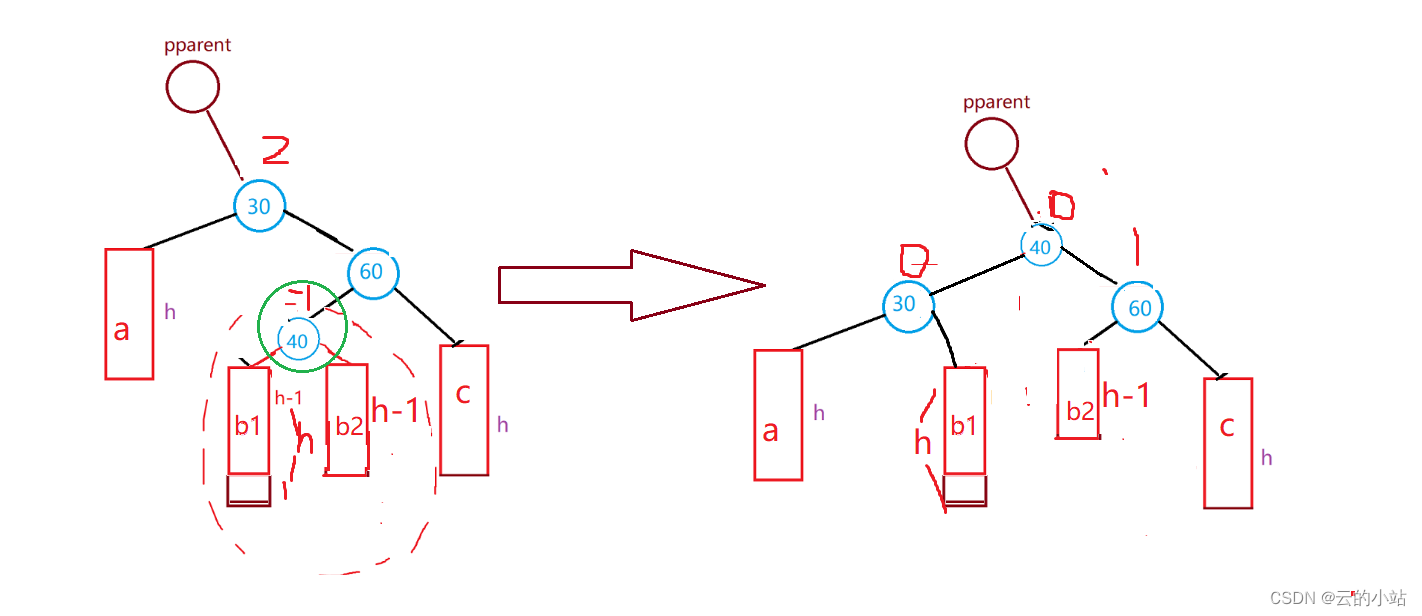
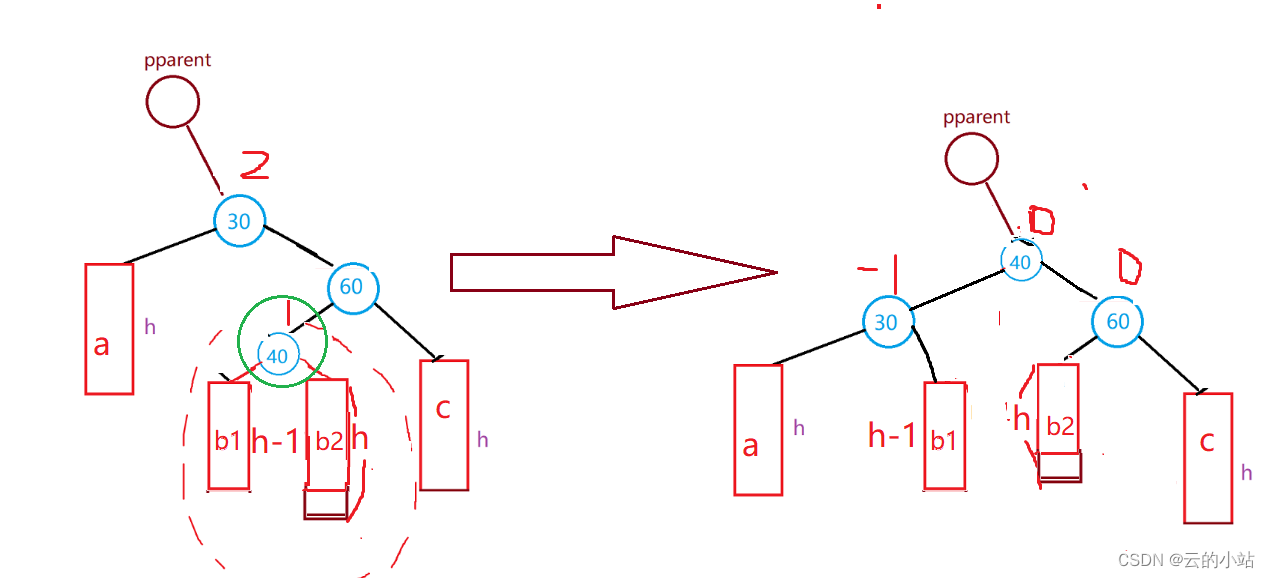
旋转前40->bf==1时,在旋转完毕后30->bf=-1、60->bf=0、40->bf=0;
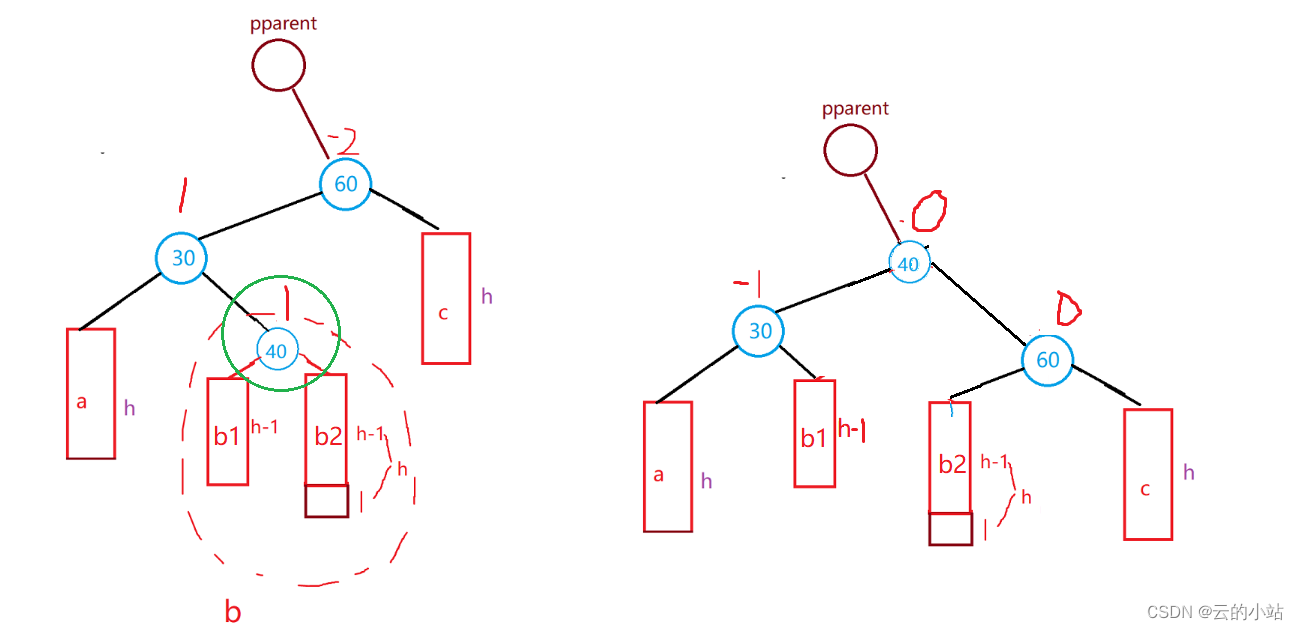
旋转前40->bf==-1时,在旋转完毕后30->bf=0、60->bf=1、40->bf=0;
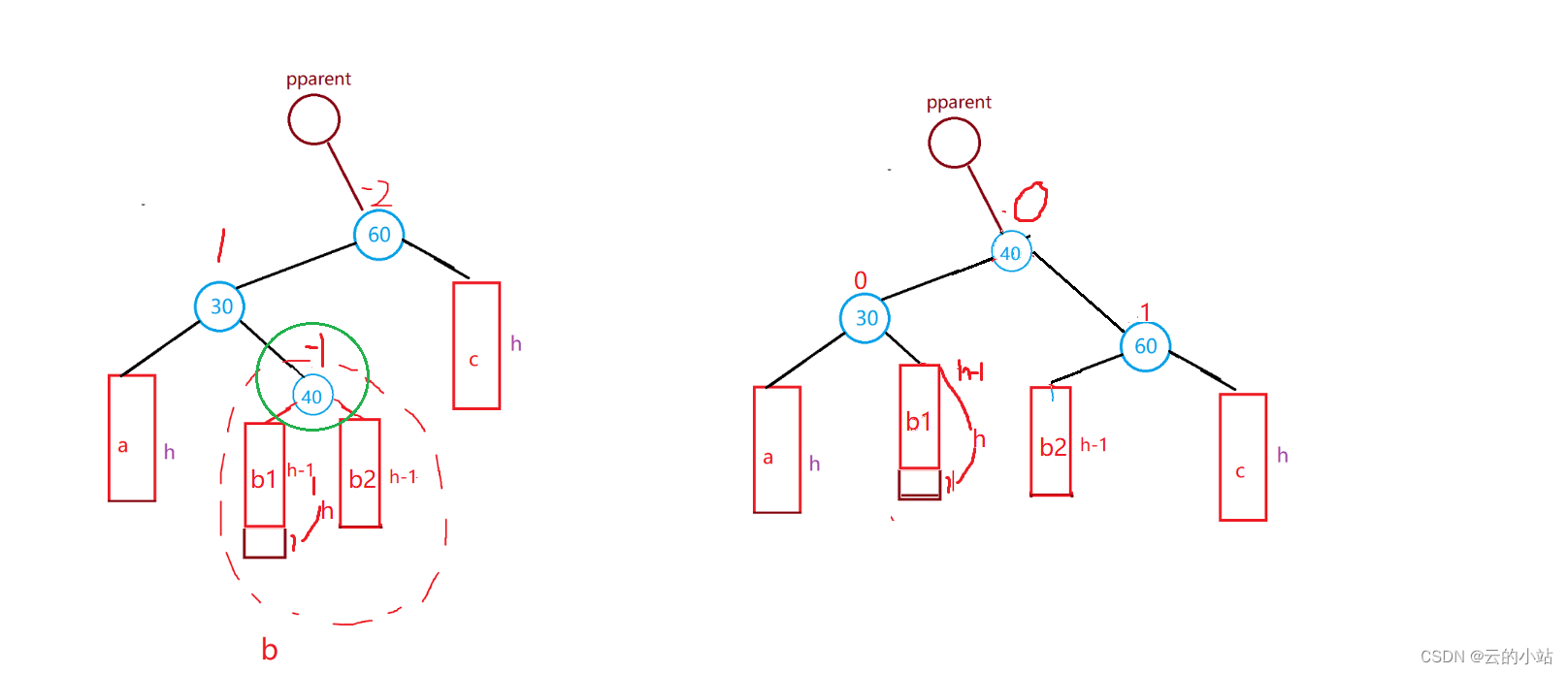
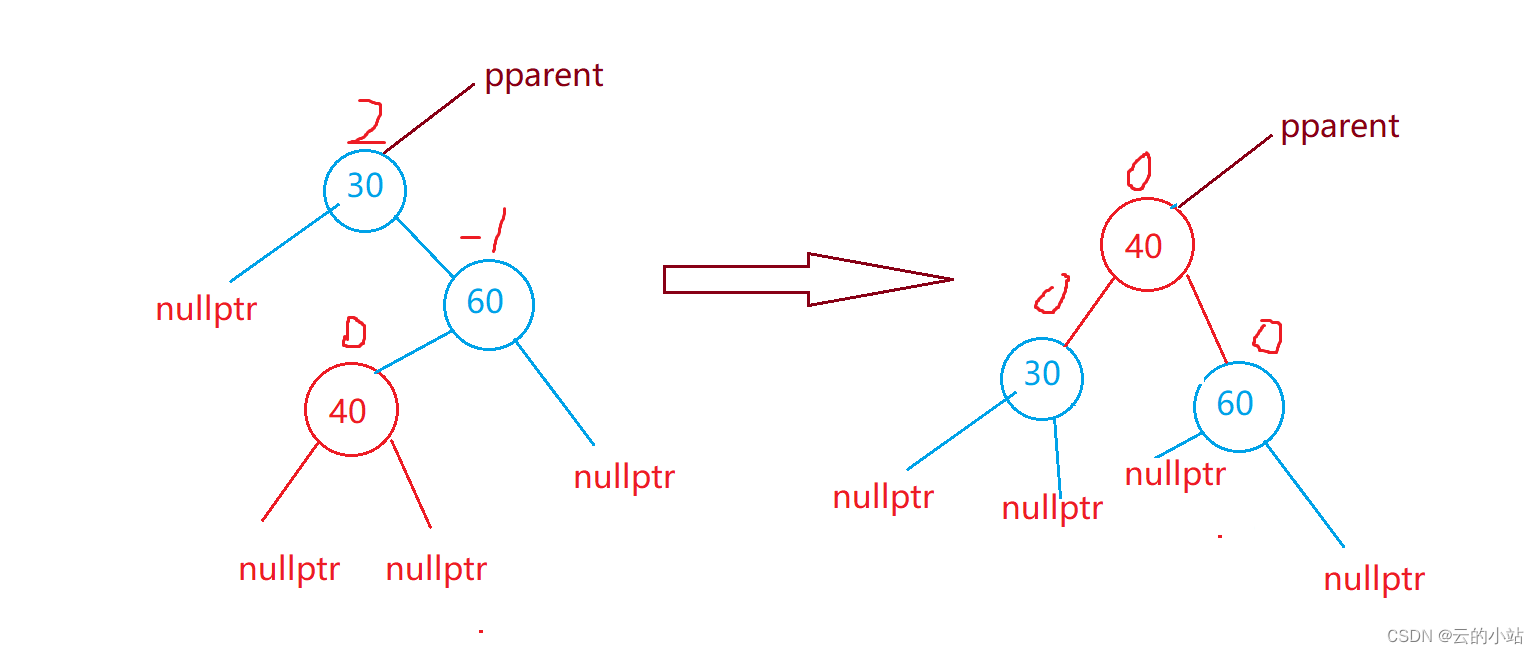
还有一种特殊的情况40->bf==0;30->bf=0、60->bf=0、40->bf=0;
左右旋代码代码:
void RotateLR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
int bf = subLR->_bf;
RotateL(subL);
RotateR(parent);
subLR->_bf = 0;
if (bf == 1)
{
parent->_bf = 0;
subL->_bf = -1;
}
else if (bf==-1)
{
parent->_bf = 1;
subL->_bf = 0;
}
else if (bf == 0)
{
parent->_bf = 0;
subL->_bf = 0;
}
else
{
assert(false);
}
} 新节点插入较高右子树的左侧---右左:先右单旋再左单旋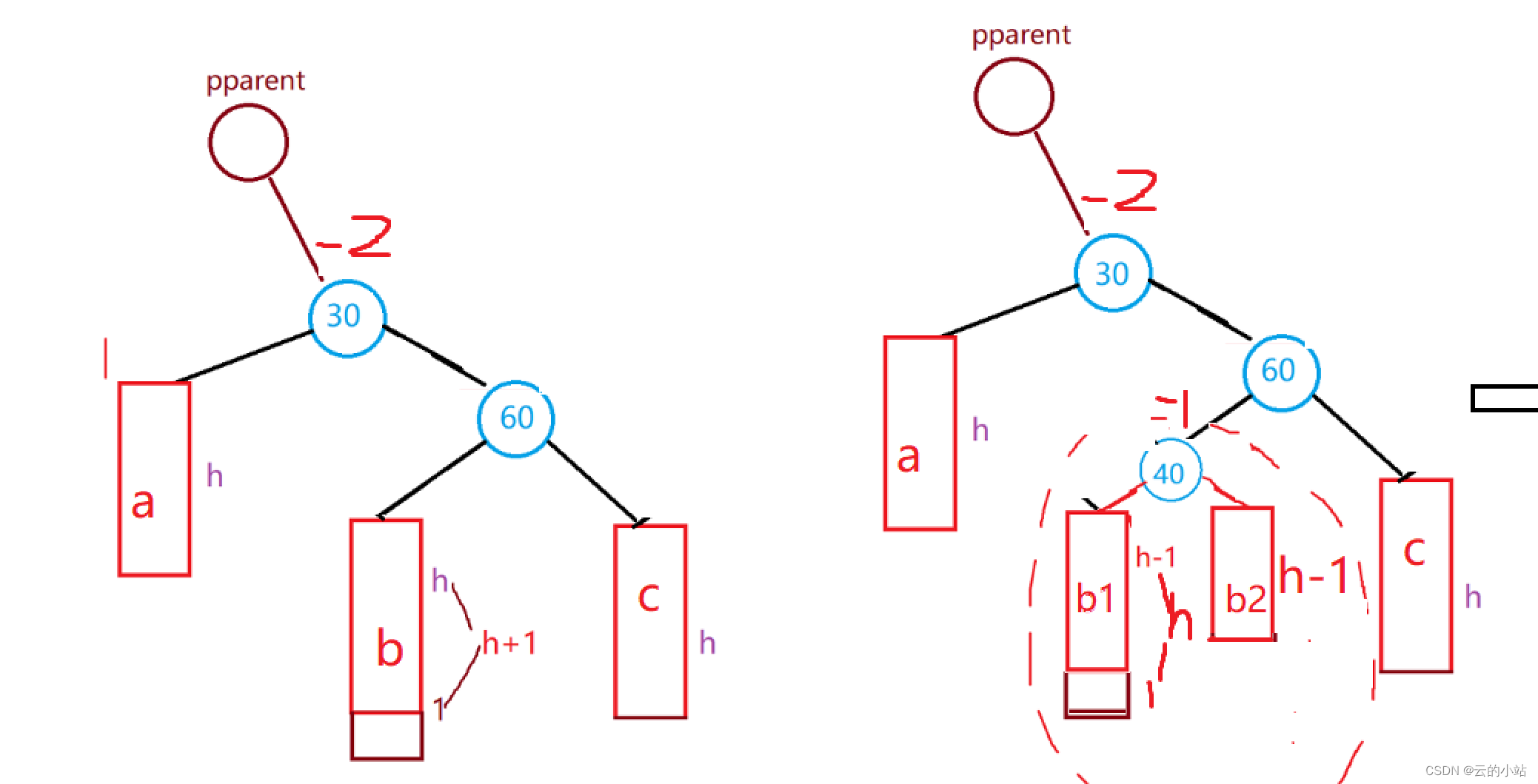
重新赋值bf与左右:先左单旋再右单旋规则一样
旋转前40->bf==-1时,在旋转完毕后30->bf=0、30->bf=1、40->bf=0;
旋转前40->bf==1时,在旋转完毕后30->bf=-1、30->bf=0、40->bf=0;
旋转前40->bf==0时,在旋转完毕后30->bf=-1、30->bf=0、40->bf=0
右左旋代码:
void RotateRL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL=subR->_left;
int bf = subRL->_bf;
RotateR(subR);
RotateL(parent);
subRL->_bf = 0;
if (bf == 1)
{
parent = -1;
subR = 0;
}
else if(bf==-1)
{
parent = 0;
subR = 1;
}
else if (bf == 0)
{
parent = 0;
subR = 0;
}
else
{
assert(0);
}
}AVLinsert完整代码:
template<class K, class V>
struct AVLTree
{
typedef AVLTreeNode<K, V> Node;
public:
bool Insert(const pair<K, V>& kv)
{
if (_root == nullptr)
{
_root = new Node(kv);
}
else
{
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
parent = cur;
if (cur->_kv.first > kv.first)
{
cur = cur->_left;
}
else if (cur->_kv.first < kv.first)
{
cur = cur->_right;
}
else
{
return false;
}
}
cur = new Node(kv);
if (parent->_kv.first <cur->_kv.first)
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
cur->_parent = parent;
while (parent)
{
if (parent->_right == cur)
{
++parent->_bf;
}
else
{
--parent->_bf;
}
if (parent->_bf == 0)
{
break;
}
else if (abs(parent->_bf) == 1)
{
cur = parent;
parent = parent->_parent;
}
else if (abs(parent->_bf) == 2)
{
if (parent->_bf == 2 && cur->_bf == 1)
{
RotateL(parent);
}
else if (parent->_bf == -2 && cur->_bf == -1)
{
RotateR(parent);
}
else if (parent->_bf == -2 && cur->_bf == 1)
{
RotateLR(parent);
}
else if (parent->_bf == 2 && cur->_bf == -1)
{
RotateRL(parent);
}
break;
}
else
{
std::cout << "AVL fail\n";
assert(false);
}
}
return true;
}
}
private:
void RotateLR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
int bf = subLR->_bf;
RotateL(subL);
RotateR(parent);
subLR->_bf = 0;
if (bf == 1)
{
parent->_bf = 0;
subL->_bf = -1;
}
else if (bf==-1)
{
parent->_bf = 1;
subL->_bf = 0;
}
else if (bf == 0)
{
parent->_bf = 0;
subL->_bf = 0;
}
else
{
printf("bf is fail!!\n");
assert(false);
}
}
void RotateRL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL=subR->_left;
int bf = subRL->_bf;
RotateR(subR);
RotateL(parent);
subRL->_bf = 0;
if (bf == 1)
{
parent = -1;
subR = 0;
}
else if(bf==-1)
{
parent = 0;
subR = 1;
}
else if (bf == 0)
{
parent = 0;
subR = 0;
}
else
{
printf("bf is fail!!\n");
assert(false);
}
}
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
if (subRL)
{
subRL->_parent = parent;
}
Node* pparent = parent->_parent;
parent->_parent = subR;
subR->_left = parent;
if (_root == parent)
{
_root = subR;
subR->_parent == nullptr;
}
else
{
if (pparent->_left == parent)
{
pparent->_left = subR;
}
else
{
pparent->_right = subR;
}
subR->_parent = pparent;
}
subR->_bf = 0;
parent->_bf = 0;
}
void RotateR(Node* parent)
{
Node* subL = parent->_right;
Node* subLR = subL->_right;
parent->_left = subLR;
if (subLR)
{
subLR->_parent = parent;
}
Node* pparent = parent->_parent;
parent->_parent = subL;
subL->_right = parent;
if (_root == parent)
{
_root = subL;
subL->_parent == nullptr;
}
else
{
if (pparent->_left == parent)
{
pparent->_left = subL;
}
else
{
pparent->_right = subL;
}
subL->_parent = pparent;
}
subL->_bf = 0;
parent->_bf = 0;
}
Node* _root;
};
}谢谢!!