一、前言
此示例说明如何使用先导校准来提高天线阵列在存在未知扰动时的性能。
原则上,可以轻松设计理想的均匀线性阵列(ULA)来执行阵列处理任务,例如波束成形或到达方向估计。在实践中,没有理想的阵列。例如,阵列内不同元素之间总会有一些不可避免的制造公差。由于通常不可能获得有关这些变化的确切知识,因此它们通常被称为不确定性或扰动。通常观察到的不确定性包括元件增益和元件相位不确定度(电不确定性)以及元件位置不确定性(几何不确定性)。
阵列系统中存在不确定性会导致阵列处理算法的检测、分辨率和估计性能快速下降。因此,在部署阵列之前对其进行校准至关重要。除上述因素外,由于硬件老化和环境影响等其他因素,还可能产生不确定性。因此,在所有部署的系统中也会定期执行校准。
有许多阵列校准算法。本例重点介绍先导校准方法[1],其中不确定性是根据阵列对已知位置的一个或多个已知外部源的响应来估计的。该示例比较了校准前后不确定性对阵列性能的影响。
二、电气和几何不确定性建模
考虑沿 y 轴的理想 6 元素 ULA,以半波长间距和均匀锥形运行。对于ULA,可以计算预期的单元位置和锥度。
接下来,对真实数组中可能存在的扰动进行建模。这些通常被建模为随机变量。例如,假设锥度的大小和相位受到标准差分别为 0.1 和 0.05 的正态分布随机变量的扰动。
下图显示了扰动锥度和设计锥度的大小和相位之间的差异。

x、y 和 z 方向传感器位置的扰动以类似的方式生成,标准偏差为 0.05。
下图显示了扰动数组和理想数组的元素位置。

三、阵列扰动的影响
上一节显示了设计的理想阵列与实际扰动阵列之间的区别。由于这些误差,如果在扰动阵列上盲目应用处理步骤,例如使用设计阵列计算的波束成形权重,性能会显着下降。
考虑一个LCMV波束形成器的情况,该波束形成器设计用于将理想阵列引导到10度方位角的方向,同时来自-10度方位角和60度方位角两个已知方向的两个干涉。目标是在抑制干扰的同时保留目标信号。
如果知道阵列锥度和几何形状的精确知识,则可以按如下方式计算波束成形权重:
但是,由于阵列包含未知的扰动,因此必须根据设计阵列的位置和锥度计算波束成形权重。下图将预期的光束模式与在扰动阵列上应用设计权重产生的光束模式进行了比较。

从绘制的图案中可以清楚地看出,由未校准的砝码产生的图案不符合要求。它在所需的 10 度方位角方向周围放置一个空值。这意味着无法再检索所需的信号。幸运的是,阵列校准可以帮助使图案恢复正常。
四、先导校准
有许多算法可用于执行阵列校准。一类常用算法是先导校准。该算法在已知方向上设置多个源,然后使用该阵列接收来自这些发射器的信号。由于这些发射器位于已知方向,因此可以计算理想阵列的预期接收信号。将这些与实际接收的信号进行比较,可以得出由于不确定性引起的差异并对其进行校正。
下面的代码显示了阵列校准的过程。首先,需要从不同的方向选择试点来源。请注意,导频源的数量决定了算法可以纠正多少不确定性。在本例中,为了校正传感器位置不确定性和锥度不确定性,至少需要四个外部源。如果使用更多的来源,估计会得到改善。
四个导引源位于以下方位角和仰角对:(-60, -10)、(-5, 0)、(5, 0) 和 (40, 30)。来自这些飞行员的接收信号可以模拟。
使用来自阵列引导的接收信号,以及设计阵列的元件位置和锥度,校准算法[1]估计扰动阵列的元件位置和锥度。
一旦估计的位置和锥度可用,就可以在计算波束形成器权重时使用这些参数代替设计的阵列参数。这将产生由下面的红线表示的数组模式。
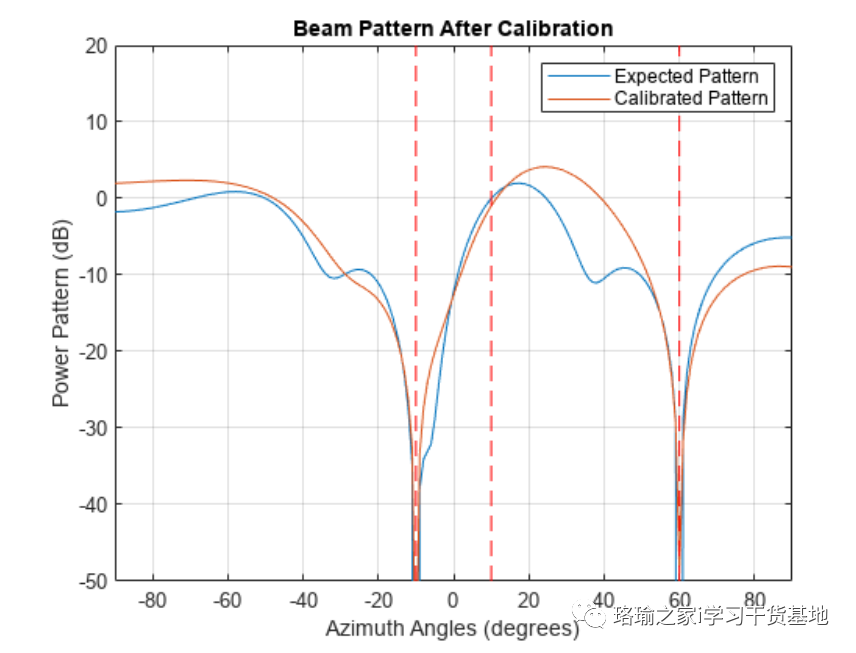
上图显示,校准阵列产生的模式比未校准阵列产生的模式要好得多。特别是,来自所需方向的信号现在被保留。
五、总结
此示例显示了数组的不确定性如何影响其响应模式,进而降低阵列的性能。该示例还说明了如何使用先导校准来帮助恢复阵列性能。
六、参考文献
[1] N. Fistas and A. Manikas, "A New General Global Array Calibration Method", IEEE Proceedings of ICASSP, Vol. IV, pp. 73-76, April 1994.
七、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
打开下面的“example.mlx”文件,点击运行,就可以看到上述效果。
程序下载方式一:基于matlab使用先导校准来补偿阵列不确定性资源-CSDN文库
程序下载方式二:基于matlab使用先导校准来补偿阵列不确定性
![P31[10-1]软件模拟IIC通信协议(使用stm32库函数)(内含:实物连接+IIC时序解释+硬件电路+IIC基本时序单元(起始 终止 发送接收 ))](https://img-blog.csdnimg.cn/8daa1d681c6e45aa986067e0d8329314.png)