MiniFilter 微过滤驱动是相对于SFilter传统过滤驱动而言的,传统文件过滤驱动相对来说较为复杂,且接口不清晰并不符合快速开发的需求,为了解决复杂的开发问题,微过滤驱动就此诞生,微过滤驱动在编写时更简单,多数IRP操作都由过滤管理器(FilterManager或Fltmgr)所接管,因为有了兼容层,所以在开发中不需要考虑底层IRP如何派发,更无需要考虑兼容性问题,用户只需要编写对应的回调函数处理请求即可,这极大的提高了文件过滤驱动的开发效率。
接下来将进入正题,讲解微过滤驱动的API定义规范以及具体的使用流程,并最终实现一个简单的过滤功能,首先你必须在VS上做如下配置,依次打开配置菜单,并增加驱动头文件。
- 配置属性 > 连接器 > 输入> 附加依赖 > fltMgr.lib
- 配置属性 > C/C++ > 常规 > 设置 关闭所有警告 (警告视为错误关闭)
未过滤驱动的使用非常容易,在使用之前第一件事就是要向过滤管理器宣告我们的微过滤驱动的存在,我们以DriverEntry入口函数为例,首先在入口处需要使用FltRegisterFilter函数注册一个过滤器组件,另外则需要通过FltStartFiltering开启过滤功能,而当我们想要关闭时则需要调用FltUnregisterFilter注销过滤组件,首先来看一下入口处是如何初始化的;
NTSTATUS DriverEntry(_In_ PDRIVER_OBJECT DriverObject, _In_ PUNICODE_STRING RegistryPath)
{
NTSTATUS status;
DbgPrint("Hello LyShark.com \n");
// FltRegisterFilter 向过滤管理器注册过滤器
// 参数1:本驱动驱动对象
// 参数2:微过滤驱动描述结构
// 参数3:返回注册成功的微过滤驱动句柄
status = FltRegisterFilter(DriverObject, &FilterRegistration, &gFilterHandle);
if (NT_SUCCESS(status))
{
// 开启过滤
status = FltStartFiltering(gFilterHandle);
DbgPrint("[过滤器] 开启监控.. \n");
if (!NT_SUCCESS(status))
{
// 如果启动失败,则取消注册并退出
FltUnregisterFilter(gFilterHandle);
DbgPrint("[过滤器] 取消注册.. \n");
}
}
return status;
}
如上代码中我们最需要关注的是FltRegisterFilter函数的第二个参数FilterRegistration它用于宣告注册信息,这个结构内包含了过滤器的所有信息,想要注册成功则我们必须更具要求正确的填写FLT_REGISTRATION微过滤器注册结构,该结构体的微软定义如下所示;
typedef struct _FLT_REGISTRATION {
USHORT Size;
USHORT Version;
FLT_REGISTRATION_FLAGS Flags;
const FLT_CONTEXT_REGISTRATION *ContextRegistration;
const FLT_OPERATION_REGISTRATION *OperationRegistration;
PFLT_FILTER_UNLOAD_CALLBACK FilterUnloadCallback;
PFLT_INSTANCE_SETUP_CALLBACK InstanceSetupCallback;
PFLT_INSTANCE_QUERY_TEARDOWN_CALLBACK InstanceQueryTeardownCallback;
PFLT_INSTANCE_TEARDOWN_CALLBACK InstanceTeardownStartCallback;
PFLT_INSTANCE_TEARDOWN_CALLBACK InstanceTeardownCompleteCallback;
PFLT_GENERATE_FILE_NAME GenerateFileNameCallback;
PFLT_NORMALIZE_NAME_COMPONENT NormalizeNameComponentCallback;
PFLT_NORMALIZE_CONTEXT_CLEANUP NormalizeContextCleanupCallback;
PFLT_TRANSACTION_NOTIFICATION_CALLBACK TransactionNotificationCallback;
PFLT_NORMALIZE_NAME_COMPONENT_EX NormalizeNameComponentExCallback;
PFLT_SECTION_CONFLICT_NOTIFICATION_CALLBACK SectionNotificationCallback;
} FLT_REGISTRATION, *PFLT_REGISTRATION;
当然如上的这些字段并非都要去填充,我们只需要填充自己所需要的部分即可,例如我们代码中只填充了如下这些必要的部分,其他部分可以省略掉,当使用如下结构体注册时,只要实例发生了变化就会根据如下配置路由到不同的函数上面做处理。
// 过滤驱动数据结构
CONST FLT_REGISTRATION FilterRegistration =
{
sizeof(FLT_REGISTRATION), // 结构大小(默认)
FLT_REGISTRATION_VERSION, // 结构版本(默认)
0, // 过滤器标志
NULL, // 上下文
Callbacks, // 注册回调函数集
Unload, // 驱动卸载函数
InstanceSetup, // 实例安装回调函数
InstanceQueryTeardown, // 实例销毁回调函数
InstanceTeardownStart, // 实例解除绑定时触发
InstanceTeardownComplete, // 实例解绑完成时触发
NULL, // GenerateFileName
NULL, // GenerateDestinationFileName
NULL // NormalizeNameComponent
};
如上结构中我们最需要注意的是Callbacks字段,该字段是操作回调函数集注册,我们对文件的各种操作的回调事件都会被写入到此处,而此处我们只需要增加我们所需要的回调事件即可,以IRP_MJ_CREATE为例,后面紧跟的是PreOperation事前回调,以及PostOperation事后回调,一般在要进行监控时通常在PreOperation()回调中处理,如果时监视则一般在PostOperation()中处理。
// 回调函数集
CONST FLT_OPERATION_REGISTRATION Callbacks[] =
{
// 创建时触发 PreOperation(之前回调函数) / PostOperation(之后回调函数)
{ IRP_MJ_CREATE, 0, PreOperation, PostOperation },
// 读取时触发
{ IRP_MJ_READ, 0, PreOperation, PostOperation },
// 写入触发
{ IRP_MJ_WRITE, 0, PreOperation, PostOperation },
// 设置时触发
{ IRP_MJ_SET_INFORMATION, 0, PreOperation, PostOperation },
// 结束标志
{ IRP_MJ_OPERATION_END }
};
如下完整代码实现了监视当前系统下所有的文件操作,如创建,读取,写入,修改,加载后则会监视系统下所有的文件操作,当然如果是监控则需要在PreOperation事前回调做文章,而如果仅仅只是监视则事前事后都是可以的。
// 署名权
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: me@lyshark.com
#include <fltKernel.h>
#include <dontuse.h>
#include <suppress.h>
PFLT_FILTER gFilterHandle;
// ----------------------------------------------------------------------------------------
// 声明部分
// ----------------------------------------------------------------------------------------
DRIVER_INITIALIZE DriverEntry;
NTSTATUS DriverEntry(
_In_ PDRIVER_OBJECT DriverObject,
_In_ PUNICODE_STRING RegistryPath
);
NTSTATUS
InstanceSetup(
_In_ PCFLT_RELATED_OBJECTS FltObjects,
_In_ FLT_INSTANCE_SETUP_FLAGS Flags,
_In_ DEVICE_TYPE VolumeDeviceType,
_In_ FLT_FILESYSTEM_TYPE VolumeFilesystemType
);
VOID
InstanceTeardownStart(
_In_ PCFLT_RELATED_OBJECTS FltObjects,
_In_ FLT_INSTANCE_TEARDOWN_FLAGS Flags
);
VOID
InstanceTeardownComplete(
_In_ PCFLT_RELATED_OBJECTS FltObjects,
_In_ FLT_INSTANCE_TEARDOWN_FLAGS Flags
);
NTSTATUS
Unload(
_In_ FLT_FILTER_UNLOAD_FLAGS Flags
);
NTSTATUS
InstanceQueryTeardown(
_In_ PCFLT_RELATED_OBJECTS FltObjects,
_In_ FLT_INSTANCE_QUERY_TEARDOWN_FLAGS Flags
);
FLT_PREOP_CALLBACK_STATUS
PreOperation(
_Inout_ PFLT_CALLBACK_DATA Data,
_In_ PCFLT_RELATED_OBJECTS FltObjects,
_Flt_CompletionContext_Outptr_ PVOID *CompletionContext
);
FLT_POSTOP_CALLBACK_STATUS
PostOperation(
_Inout_ PFLT_CALLBACK_DATA Data,
_In_ PCFLT_RELATED_OBJECTS FltObjects,
_In_opt_ PVOID CompletionContext,
_In_ FLT_POST_OPERATION_FLAGS Flags
);
// ----------------------------------------------------------------------------------------
// 回调函数
// ----------------------------------------------------------------------------------------
// 当实例被安装时触发
NTSTATUS InstanceSetup(_In_ PCFLT_RELATED_OBJECTS FltObjects, _In_ FLT_INSTANCE_SETUP_FLAGS Flags, _In_ DEVICE_TYPE VolumeDeviceType, _In_ FLT_FILESYSTEM_TYPE VolumeFilesystemType)
{
DbgPrint("[LyShark] 安装 MiniFilter \n");
return STATUS_SUCCESS;
}
// 当实例被销毁时触发
NTSTATUS InstanceQueryTeardown(_In_ PCFLT_RELATED_OBJECTS FltObjects, _In_ FLT_INSTANCE_QUERY_TEARDOWN_FLAGS Flags)
{
DbgPrint("[LyShark] 销毁 MiniFilter \n");
return STATUS_SUCCESS;
}
// 实例解除绑定时触发
VOID InstanceTeardownStart(_In_ PCFLT_RELATED_OBJECTS FltObjects, _In_ FLT_INSTANCE_TEARDOWN_FLAGS Flags)
{
DbgPrint("[LyShark] 解绑 MiniFilter \n");
return STATUS_SUCCESS;
}
// 实例解绑完成时触发
VOID InstanceTeardownComplete(_In_ PCFLT_RELATED_OBJECTS FltObjects, _In_ FLT_INSTANCE_TEARDOWN_FLAGS Flags)
{
DbgPrint("[LyShark] 解绑完成 MiniFilter \n");
return STATUS_SUCCESS;
}
// 驱动关闭时卸载监控
NTSTATUS Unload(_In_ FLT_FILTER_UNLOAD_FLAGS Flags)
{
DbgPrint("[LyShark] 卸载 MiniFilter \n");
FltUnregisterFilter(gFilterHandle);
return STATUS_SUCCESS;
}
// 回调函数集
CONST FLT_OPERATION_REGISTRATION Callbacks[] =
{
// 创建时触发 PreOperation(之前回调函数) / PostOperation(之后回调函数)
{ IRP_MJ_CREATE, 0, PreOperation, PostOperation },
// 读取时触发
{ IRP_MJ_READ, 0, PreOperation, PostOperation },
// 写入触发
{ IRP_MJ_WRITE, 0, PreOperation, PostOperation },
// 设置时触发
{ IRP_MJ_SET_INFORMATION, 0, PreOperation, PostOperation },
// 结束标志
{ IRP_MJ_OPERATION_END }
};
// 过滤驱动数据结构
CONST FLT_REGISTRATION FilterRegistration =
{
sizeof(FLT_REGISTRATION), // 结构大小(默认)
FLT_REGISTRATION_VERSION, // 结构版本(默认)
0, // 过滤器标志
NULL, // 上下文
Callbacks, // 注册回调函数集
Unload, // 驱动卸载函数
InstanceSetup, // 实例安装回调函数
InstanceQueryTeardown, // 实例销毁回调函数
InstanceTeardownStart, // 实例解除绑定时触发
InstanceTeardownComplete, // 实例解绑完成时触发
NULL, // GenerateFileName
NULL, // GenerateDestinationFileName
NULL // NormalizeNameComponent
};
// ----------------------------------------------------------------------------------------
// 功能函数
// ----------------------------------------------------------------------------------------
// 预操作回调函数(在执行过滤操作之前先执行此处)
FLT_PREOP_CALLBACK_STATUS PreOperation(_Inout_ PFLT_CALLBACK_DATA Data, _In_ PCFLT_RELATED_OBJECTS FltObjects, _Flt_CompletionContext_Outptr_ PVOID *CompletionContext)
{
NTSTATUS status;
// 获取文件路径
UCHAR MajorFunction = Data->Iopb->MajorFunction;
PFLT_FILE_NAME_INFORMATION lpNameInfo = NULL;
// 得到文件名相关信息
status = FltGetFileNameInformation(Data, FLT_FILE_NAME_NORMALIZED | FLT_FILE_NAME_QUERY_DEFAULT, &lpNameInfo);
if (NT_SUCCESS(status))
{
status = FltParseFileNameInformation(lpNameInfo);
if (NT_SUCCESS(status))
{
// 创建
if (IRP_MJ_CREATE == MajorFunction)
{
DbgPrint("[创建文件时] %wZ", &lpNameInfo->Name);
// 拒绝创建
// STATUS_INSUFFICIENT_RESOURCES 提示不是有效的资源
// STATUS_ACCESS_DISABLED_NO_SAFER_UI_BY_POLICY 静默拒绝
// STATUS_ACCESS_DENIED 提示访问拒绝
// return STATUS_ACCESS_DENIED;
// return FLT_PREOP_COMPLETE;
}
// 读取
else if (IRP_MJ_READ == MajorFunction)
{
DbgPrint("[读取文件时] %wZ", &lpNameInfo->Name);
// return FLT_PREOP_COMPLETE;
}
// 文件写入
else if (IRP_MJ_WRITE == MajorFunction)
{
DbgPrint("[写入文件时] %wZ", &lpNameInfo->Name);
// return FLT_PREOP_COMPLETE;
}
// 修改文件信息
else if (IRP_MJ_SET_INFORMATION == MajorFunction)
{
DbgPrint("[修改文件] %wZ", &lpNameInfo->Name);
// return FLT_PREOP_COMPLETE;
}
}
}
return FLT_PREOP_SUCCESS_WITH_CALLBACK;
}
// 后操作回调函数 (在执行过滤之后运行此处)
FLT_POSTOP_CALLBACK_STATUS PostOperation(_Inout_ PFLT_CALLBACK_DATA Data, _In_ PCFLT_RELATED_OBJECTS FltObjects, _In_opt_ PVOID CompletionContext, _In_ FLT_POST_OPERATION_FLAGS Flags)
{
return FLT_POSTOP_FINISHED_PROCESSING;
}
// ----------------------------------------------------------------------------------------
// 入口函数
// ----------------------------------------------------------------------------------------
NTSTATUS DriverEntry(_In_ PDRIVER_OBJECT DriverObject, _In_ PUNICODE_STRING RegistryPath)
{
NTSTATUS status;
DbgPrint("Hello LyShark.com \n");
// FltRegisterFilter 向过滤管理器注册过滤器
// 参数1:本驱动驱动对象
// 参数2:微过滤驱动描述结构
// 参数3:返回注册成功的微过滤驱动句柄
status = FltRegisterFilter(DriverObject, &FilterRegistration, &gFilterHandle);
if (NT_SUCCESS(status))
{
// 开启过滤
status = FltStartFiltering(gFilterHandle);
DbgPrint("[过滤器] 开启监控.. \n");
if (!NT_SUCCESS(status))
{
// 如果启动失败,则取消注册并退出
FltUnregisterFilter(gFilterHandle);
DbgPrint("[过滤器] 取消注册.. \n");
}
}
return status;
}
过滤驱动的安装方式有多种,可以通过函数注册或者使用INF文件像系统注册驱动,首先以INF为例安装,通过修改INF中的ServiceName以及DriverName并将其改为WinDDK,将文件保存为install.inf鼠标右键选择安装即可。
[Version]
Signature = "$Windows NT$"
Class = "ActivityMonitor" ;指明了驱动的分组,必须指定.
ClassGuid = {b86dff51-a31e-4bac-b3cf-e8cfe75c9fc2} ;GUID 每个分组都有固定的GUID
Provider = %Msft% ;变量值 从STRING节中可以看到驱动提供者的名称
DriverVer = 06/16/2007,1.0.0.1 ;版本号
CatalogFile = passthrough.cat ;inf对应的cat 文件 可以不需要
[DestinationDirs]
DefaultDestDir = 12 ;告诉我们驱动拷贝到哪里 13代表拷贝到%windir%
MiniFilter.DriverFiles = 12 ;%windir%\system32\drivers
[DefaultInstall]
OptionDesc = %ServiceDescription%
CopyFiles = MiniFilter.DriverFiles
[DefaultInstall.Services]
AddService = %ServiceName%,,MiniFilter.Service
[DefaultUninstall]
DelFiles = MiniFilter.DriverFiles
[DefaultUninstall.Services]
DelService = %ServiceName%,0x200 ;Ensure service is stopped before deleting
[MiniFilter.Service] ;服务的一些信息
DisplayName = %ServiceName%
Description = %ServiceDescription%
ServiceBinary = %12%\%DriverName%.sys ;%windir%\system32\drivers\
Dependencies = "FltMgr" ;服务的依赖
ServiceType = 2 ;SERVICE_FILE_SYSTEM_DRIVER
StartType = 3 ;SERVICE_DEMAND_START
ErrorControl = 1 ;SERVICE_ERROR_NORMAL
LoadOrderGroup = "FSFilter Activity Monitor" ;文件过滤分组
AddReg = MiniFilter.AddRegistry ;文件过滤注册表需要添加的高度值等信息
[MiniFilter.AddRegistry]
HKR,,"DebugFlags",0x00010001 ,0x0
HKR,"Instances","DefaultInstance",0x00000000,%DefaultInstance%
HKR,"Instances\"%Instance1.Name%,"Altitude",0x00000000,%Instance1.Altitude%
HKR,"Instances\"%Instance1.Name%,"Flags",0x00010001,%Instance1.Flags%
[MiniFilter.DriverFiles]
%DriverName%.sys
[SourceDisksFiles]
passthrough.sys = 1,,
[SourceDisksNames]
1 = %DiskId1%,,,
[Strings]
Msft = "Microsoft Corporation"
ServiceDescription = "WinDDK Mini-Filter Driver"
ServiceName = "WinDDK"
DriverName = "WinDDK"
DiskId1 = "WinDDK Device Installation Disk"
DefaultInstance = "WinDDK Instance"
Instance1.Name = "WinDDK Instance"
Instance1.Altitude = "370030"
Instance1.Flags = 0x0 ; Allow all attachments
第二种安装方式则是通过字写驱动加载工具实现,本人更推荐使用此方式安装,此种方式的原理同样是向注册表中写出子健,但同时具备有启动与关闭驱动的功能,比INF安装更灵活易于使用,完整代码如下所示;
// 署名权
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: me@lyshark.com
#include <Windows.h>
#include <iostream>
#include <winsvc.h>
#include <winioctl.h>
// 安装MiniFinter
BOOL InstallDriver(const char* lpszDriverName, const char* lpszDriverPath, const char* lpszAltitude)
{
char szTempStr[MAX_PATH];
HKEY hKey;
DWORD dwData;
char szDriverImagePath[MAX_PATH];
if (NULL == lpszDriverName || NULL == lpszDriverPath)
{
return FALSE;
}
// 得到完整的驱动路径
GetFullPathName(lpszDriverPath, MAX_PATH, szDriverImagePath, NULL);
SC_HANDLE hServiceMgr = NULL; // SCM管理器的句柄
SC_HANDLE hService = NULL; // NT驱动程序的服务句柄
// 打开服务控制管理器
hServiceMgr = OpenSCManager(NULL, NULL, SC_MANAGER_ALL_ACCESS);
if (hServiceMgr == NULL)
{
// OpenSCManager失败
CloseServiceHandle(hServiceMgr);
return FALSE;
}
// OpenSCManager成功
// 创建驱动所对应的服务
hService = CreateService(hServiceMgr,
lpszDriverName, // 驱动程序的在注册表中的名字
lpszDriverName, // 注册表驱动程序的DisplayName 值
SERVICE_ALL_ACCESS, // 加载驱动程序的访问权限
SERVICE_FILE_SYSTEM_DRIVER, // 表示加载的服务是文件系统驱动程序
SERVICE_DEMAND_START, // 注册表驱动程序的Start 值
SERVICE_ERROR_IGNORE, // 注册表驱动程序的ErrorControl 值
szDriverImagePath, // 注册表驱动程序的ImagePath 值
"FSFilter Activity Monitor",// 注册表驱动程序的Group 值
NULL,
"FltMgr", // 注册表驱动程序的DependOnService 值
NULL,
NULL);
if (hService == NULL)
{
if (GetLastError() == ERROR_SERVICE_EXISTS)
{
// 服务创建失败,是由于服务已经创立过
CloseServiceHandle(hService); // 服务句柄
CloseServiceHandle(hServiceMgr); // SCM句柄
return TRUE;
}
else
{
CloseServiceHandle(hService); // 服务句柄
CloseServiceHandle(hServiceMgr); // SCM句柄
return FALSE;
}
}
CloseServiceHandle(hService); // 服务句柄
CloseServiceHandle(hServiceMgr); // SCM句柄
//-------------------------------------------------------------------------------------------------------
// SYSTEM\\CurrentControlSet\\Services\\DriverName\\Instances 子键下的键值项
//-------------------------------------------------------------------------------------------------------
strcpy(szTempStr, "SYSTEM\\CurrentControlSet\\Services\\");
strcat(szTempStr, lpszDriverName);
strcat(szTempStr, "\\Instances");
if (RegCreateKeyEx(HKEY_LOCAL_MACHINE, szTempStr, 0, "", TRUE, KEY_ALL_ACCESS, NULL, &hKey, (LPDWORD)&dwData) != ERROR_SUCCESS)
{
return FALSE;
}
// 注册表驱动程序的DefaultInstance 值
strcpy(szTempStr, lpszDriverName);
strcat(szTempStr, " Instance");
if (RegSetValueEx(hKey, "DefaultInstance", 0, REG_SZ, (CONST BYTE*)szTempStr, (DWORD)strlen(szTempStr)) != ERROR_SUCCESS)
{
return FALSE;
}
// 刷新注册表
RegFlushKey(hKey);
RegCloseKey(hKey);
//-------------------------------------------------------------------------------------------------------
// SYSTEM\\CurrentControlSet\\Services\\DriverName\\Instances\\DriverName Instance 子键下的键值项
//-------------------------------------------------------------------------------------------------------
strcpy(szTempStr, "SYSTEM\\CurrentControlSet\\Services\\");
strcat(szTempStr, lpszDriverName);
strcat(szTempStr, "\\Instances\\");
strcat(szTempStr, lpszDriverName);
strcat(szTempStr, " Instance");
if (RegCreateKeyEx(HKEY_LOCAL_MACHINE, szTempStr, 0, "", TRUE, KEY_ALL_ACCESS, NULL, &hKey, (LPDWORD)&dwData) != ERROR_SUCCESS)
{
return FALSE;
}
// 注册表驱动程序的Altitude 值
strcpy(szTempStr, lpszAltitude);
if (RegSetValueEx(hKey, "Altitude", 0, REG_SZ, (CONST BYTE*)szTempStr, (DWORD)strlen(szTempStr)) != ERROR_SUCCESS)
{
return FALSE;
}
// 注册表驱动程序的Flags 值
dwData = 0x0;
if (RegSetValueEx(hKey, "Flags", 0, REG_DWORD, (CONST BYTE*)&dwData, sizeof(DWORD)) != ERROR_SUCCESS)
{
return FALSE;
}
// 刷新注册表
RegFlushKey(hKey);
RegCloseKey(hKey);
return TRUE;
}
// 启动驱动
BOOL StartDriver(const char* lpszDriverName)
{
SC_HANDLE schManager;
SC_HANDLE schService;
SERVICE_STATUS svcStatus;
if (NULL == lpszDriverName)
{
return FALSE;
}
schManager = OpenSCManager(NULL, NULL, SC_MANAGER_ALL_ACCESS);
if (NULL == schManager)
{
CloseServiceHandle(schManager);
return FALSE;
}
schService = OpenService(schManager, lpszDriverName, SERVICE_ALL_ACCESS);
if (NULL == schService)
{
CloseServiceHandle(schService);
CloseServiceHandle(schManager);
return FALSE;
}
if (!StartService(schService, 0, NULL))
{
CloseServiceHandle(schService);
CloseServiceHandle(schManager);
if (GetLastError() == ERROR_SERVICE_ALREADY_RUNNING)
{
// 服务已经开启
return TRUE;
}
return FALSE;
}
CloseServiceHandle(schService);
CloseServiceHandle(schManager);
return TRUE;
}
// 关闭驱动
BOOL StopDriver(const char* lpszDriverName)
{
SC_HANDLE schManager;
SC_HANDLE schService;
SERVICE_STATUS svcStatus;
bool bStopped = false;
schManager = OpenSCManager(NULL, NULL, SC_MANAGER_ALL_ACCESS);
if (NULL == schManager)
{
return FALSE;
}
schService = OpenService(schManager, lpszDriverName, SERVICE_ALL_ACCESS);
if (NULL == schService)
{
CloseServiceHandle(schManager);
return FALSE;
}
if (!ControlService(schService, SERVICE_CONTROL_STOP, &svcStatus) && (svcStatus.dwCurrentState != SERVICE_STOPPED))
{
CloseServiceHandle(schService);
CloseServiceHandle(schManager);
return FALSE;
}
CloseServiceHandle(schService);
CloseServiceHandle(schManager);
return TRUE;
}
// 删除驱动
BOOL DeleteDriver(const char* lpszDriverName)
{
SC_HANDLE schManager;
SC_HANDLE schService;
SERVICE_STATUS svcStatus;
schManager = OpenSCManager(NULL, NULL, SC_MANAGER_ALL_ACCESS);
if (NULL == schManager)
{
return FALSE;
}
schService = OpenService(schManager, lpszDriverName, SERVICE_ALL_ACCESS);
if (NULL == schService)
{
CloseServiceHandle(schManager);
return FALSE;
}
ControlService(schService, SERVICE_CONTROL_STOP, &svcStatus);
if (!DeleteService(schService))
{
CloseServiceHandle(schService);
CloseServiceHandle(schManager);
return FALSE;
}
CloseServiceHandle(schService);
CloseServiceHandle(schManager);
return TRUE;
}
int main(int argc, char* argv[])
{
InstallDriver("minifilter", ".\\WinDDK.sys", "225864");
while (1)
{
char str[20] = "\0";
printf("请输入命令: ");
gets(str);
if (strcmp(str, "start") == 0)
{
printf("[*] 启动驱动 \n");
StartDriver("minifilter");
}
if (strcmp(str, "stop") == 0)
{
printf("[-] 关闭驱动 \n");
StopDriver("minifilter");
}
}
return 0;
}
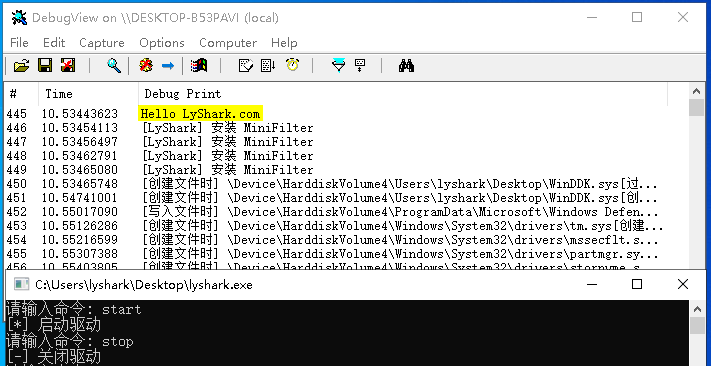
至此分别编译驱动程序,以及应用层下的安装程序,并将两者放入到同一目录下,运行客户端程序lyshark.exe并输入start启动驱动,输入stop则是关闭,启动后会看到如下信息;
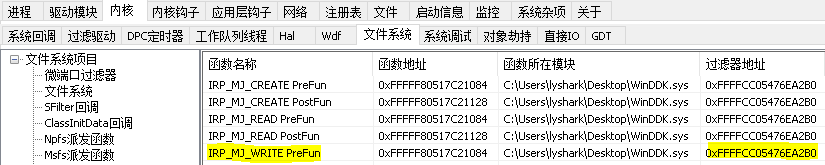
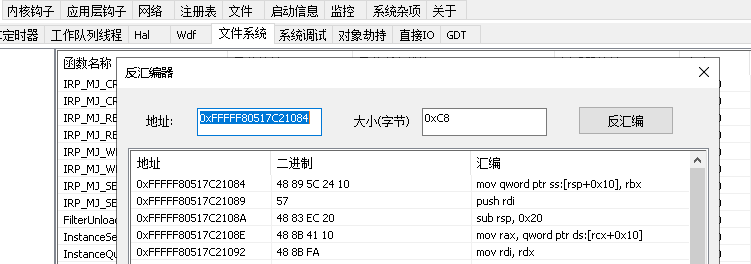
这里简单介绍一下如何摘除微过滤驱动回调函数,其实摘除回调的方法有多种,常用的第一种通过向过滤驱动中写出一个返回命令让其不被执行从而实现绕过,另一种是找到回调函数并替换为我们自己的回调,而在自己的回调中什么也不做,这里以第二种方法为例,实现替换的代码可以写成如下案例;
#include <fltKernel.h>
// 设置默认回调
NTSTATUS DriverDefaultHandle(PDEVICE_OBJECT pDevObj, PIRP pIrp)
{
NTSTATUS status = STATUS_SUCCESS;
pIrp->IoStatus.Status = status;
pIrp->IoStatus.Information = 0;
IoCompleteRequest(pIrp, IO_NO_INCREMENT);
return status;
}
// ------------------------------------------------------------------------
// 消息转向函数
// ------------------------------------------------------------------------
// 自定义回调 消息处理前
FLT_PREOP_CALLBACK_STATUS MyMiniFilterPreOperation(_Inout_ PFLT_CALLBACK_DATA Data,_In_ PCFLT_RELATED_OBJECTS FltObjects,_Flt_CompletionContext_Outptr_ PVOID *CompletionContext)
{
UNREFERENCED_PARAMETER(FltObjects);
UNREFERENCED_PARAMETER(CompletionContext);
return FLT_PREOP_SUCCESS_WITH_CALLBACK;
}
// 自定义回调 消息处理后
FLT_POSTOP_CALLBACK_STATUS MyMiniFilterPostOperation(_Inout_ PFLT_CALLBACK_DATA Data,_In_ PCFLT_RELATED_OBJECTS FltObjects,_In_opt_ PVOID CompletionContext,_In_ FLT_POST_OPERATION_FLAGS Flags)
{
UNREFERENCED_PARAMETER(Data);
UNREFERENCED_PARAMETER(FltObjects);
UNREFERENCED_PARAMETER(CompletionContext);
UNREFERENCED_PARAMETER(Flags);
return FLT_POSTOP_FINISHED_PROCESSING;
}
// 替换回调函数
NTSTATUS RemoveCallback(PFLT_FILTER pFilter)
{
LONG lOperationsOffset = 0;
PFLT_OPERATION_REGISTRATION pFltOperationRegistration = NULL;
// 遍历过滤器Filter
pFltOperationRegistration = (PFLT_OPERATION_REGISTRATION)(*(PVOID *)((PUCHAR)pFilter + lOperationsOffset));
__try
{
while (IRP_MJ_OPERATION_END != pFltOperationRegistration->MajorFunction)
{
if (IRP_MJ_MAXIMUM_FUNCTION > pFltOperationRegistration->MajorFunction)
{
// 替换回调函数
pFltOperationRegistration->PreOperation = MyMiniFilterPreOperation;
pFltOperationRegistration->PostOperation = MyMiniFilterPostOperation;
}
pFltOperationRegistration = (PFLT_OPERATION_REGISTRATION)((PUCHAR)pFltOperationRegistration + sizeof(FLT_OPERATION_REGISTRATION));
}
}
__except (EXCEPTION_EXECUTE_HANDLER)
{
return STATUS_SUCCESS;
}
return STATUS_SUCCESS;
}
VOID DriverUnload(PDRIVER_OBJECT pDriverObject)
{
return STATUS_SUCCESS;
}
NTSTATUS DriverEntry(PDRIVER_OBJECT pDriverObject, PUNICODE_STRING pRegPath)
{
NTSTATUS status = STATUS_SUCCESS;
pDriverObject->DriverUnload = DriverUnload;
for (ULONG i = 0; i < IRP_MJ_MAXIMUM_FUNCTION; i++)
{
pDriverObject->MajorFunction[i] = DriverDefaultHandle;
}
return status;
}