论文题目:A non-local algorithm for image denoising
1 摘要
我们提出了一种新的衡量噪声的方法,来评价和比较数字图像去噪方法的性能。我们首先计算和分析该方法的噪声类去噪算法,即局部平滑滤波器。其次,我们提出了一种新的算法非局部均值(NL-means),基于图像中所有像素的非局部平均。最后,我们比较了nl-均值算法和局部平滑滤波器的实验。
2 理论介绍
2.1 背景
图像中的像素不是孤立存在的,它们高度相关,其像素不仅相似,而且与周围的像素一起形成图像的几何结构,即具有几何相似性。邻域像素中心窗口或图像patch,可以反映像素的结构特征,如循环模式和纹理结构。因此,在整个图像补丁中有很多相似的结构,如果使用可以描述图像结构特征来衡量像素之间的相似性,将比单像素更准确,从而更好地保护图像的结构信息。
并提出并分析了由简单公式定义的NL-means算法:


下图是 N L − m e a n s NL-means NL−means算法执行过程,大窗口是以目标像素为中心的搜索窗口,两个灰色小窗口分别是以 x x x、 y y y中心的邻域窗口。其中以 y y y为中心的邻域窗口在搜索窗口中滑动,通过计算两个邻域窗口间的相似程度为 y y y赋以权值 w ( x , y ) w(x,y) w(x,y) 。

2.2 非局部均值方法
给定一个离散的噪声图像
v
=
v
(
i
)
∣
i
∈
I
v = {v (i) | i∈I}
v=v(i)∣i∈I,对于一个像素
i
i
i的估计值
N
L
[
v
]
(
i
)
NL[v](i)
NL[v](i)被计算为图像中所有像素的加权平均值,

其中,权值族
w
(
i
,
j
)
j
{w(i,j)}_j
w(i,j)j依赖于像素
i
i
i和
j
j
j之间的相似性,并满足通常的条件
0
≤
w
(
i
,
j
)
≤
1
0≤w(i,j)≤1
0≤w(i,j)≤1和
∑
j
w
(
i
,
j
)
=
1
\sum_j w(i,j)=1
∑jw(i,j)=1。
两个像素
i
i
i和
j
j
j之间的相似性取决于强度灰度级向量
v
(
N
i
)
v(N_i)
v(Ni)和
v
(
N
j
)
v(N_j)
v(Nj)的相似性,其中
N
k
N_k
Nk表示一个固定大小且以像素
k
k
k为中心的正方形邻域。相似度衡量作为加权欧几里得距离的递减函数,
∣
∣
v
(
N
i
)
−
v
(
N
j
)
∣
∣
2
2
,
a
||v(N_i)−v(N_j)||_2^2,a
∣∣v(Ni)−v(Nj)∣∣22,a,其中
a
>
0
a >0
a>0是高斯核的标准差。将欧几里得距离应用于噪声邻域,提出了以下等式:

这个等式表明了该算法的鲁棒性,因为在期望中,欧氏距离保持了像素之间的相似性的顺序。
与
v
(
N
i
)
v(N_i)
v(Ni)灰度邻域相似的像素在平均值中具有较大的权重,见图1。这些权重被定义为:
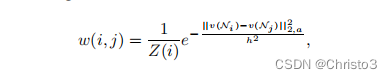
其中
Z
(
i
)
Z (i)
Z(i)是归一化常数

而参数
h
h
h作为一个滤波的程度。它控制了指数函数的衰减,因此也控制了权值作为欧几里得距离的函数的衰减。
N
L
−
m
e
a
n
NL-mean
NL−mean不仅比较单个点的灰度,而且比较整个邻域的几何结构。这一事实允许比邻域滤波器进行更稳健的比较。图1说明了这一事实,像素
q
3
q3
q3具有相同的灰度值像素
p
p
p,但邻域有很大的不同,因此权重
w
(
p
,
q
3
)
w(p,q3)
w(p,q3)接近于零。

3 结论
在本节中,我们比较了局部平滑滤波器和
N
L
−
m
e
a
n
s
NL-means
NL−means算法在三个定义良好的标准下:方法噪声、恢复图像的视觉质量和均方误差,即恢复图像和真实图像之间的欧氏差。为了
N
L
−
m
e
a
n
s
NL-means
NL−means算法的计算目的,我们可以在一个更大的
S
×
S
S×S
S×S像素大小的“搜索窗口”中限制类似窗口的搜索。在所有的实验中,我们固定了一个
21
×
21
21×21
21×21像素的搜索窗口和一个
7
×
7
7×7
7×7像素的相似平方邻域
N
i
N_i
Ni。如果
N
2
N^2
N2是图像的像素数,则算法的最终复杂度约为
49
×
441
×
N
2
49×441×N2
49×441×N2。
7
×
7
7×7
7×7相似窗口已经被证明足够大,可以对噪声鲁棒,足够小,可以处理细节和精细结构。当加入标准偏差
σ
σ
σ的噪声时,滤波参数
h
h
h被固定为
10
∗
σ
10∗σ
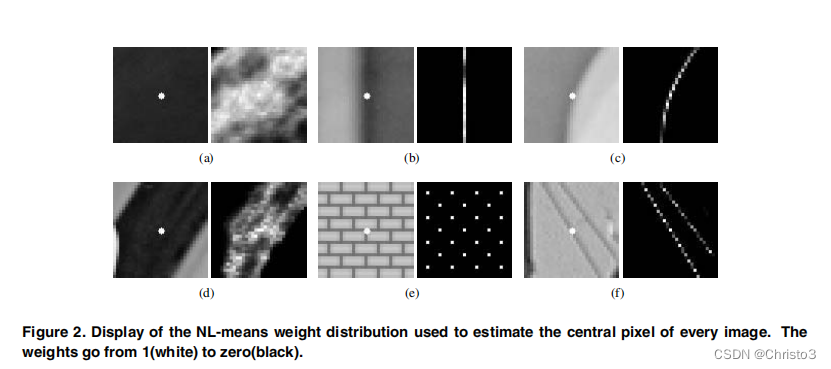
10∗σ。由于指数核的快速衰减,较大的欧几里得距离导致接近于零的权重作为一个自动阈值,见图2。
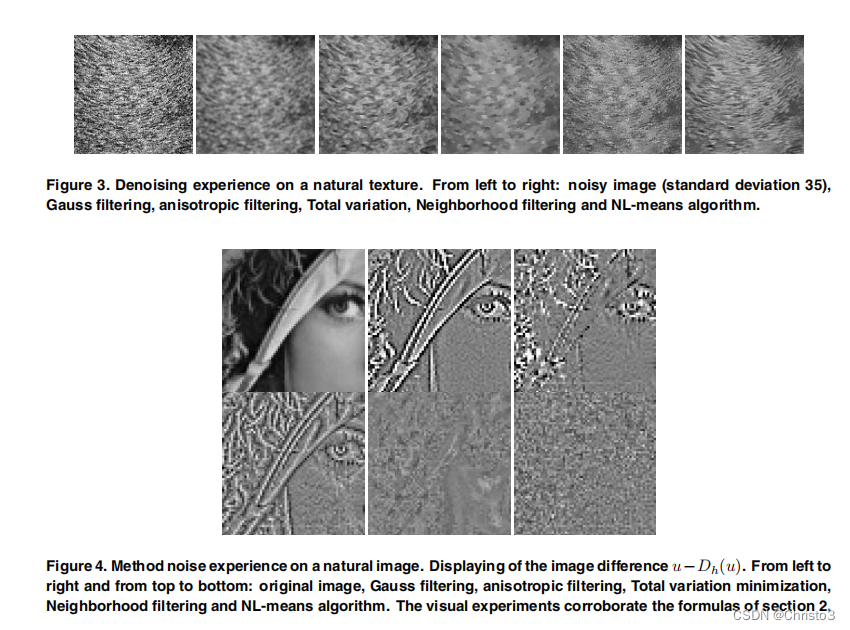
在第2节中,我们已经明确地计算了局部平滑滤波器的方法噪声。这些公式被图4的可视化实验验证了。该图显示了标准图像Lena的方法噪声,即差值
u
−
D
h
(
u
)
u−D_h (u)
u−Dh(u),其中参数
h
h
h被固定,以消除标准偏差为2.5的噪声。该方法噪声有助于我们理解去噪算法的性能和局限性,因为去除的细节或纹理具有很大的方法噪声。我们在图4中可以看到,
N
L
−
m
e
a
n
s
NL-means
NL−means方法的噪声没有呈现出任何明显的几何结构。图2解释了这个属性,因为它显示了
N
L
−
m
e
a
n
s
NL-means
NL−means算法如何选择一个适应于图像的局部和非局部几何形状的加权配置。
人眼是唯一能够决定通过去噪方法是否提高了图像质量的方法。我们展示了一些去噪经验,比较了与局部平滑滤波器的去噪算法。所有实验都通过在真实图像中加入标准差
σ
σ
σ的高斯白噪声进行模拟。目的是比较恢复后的图像的视觉质量,伪影的不存在和边缘、纹理和细节的正确重建。
由于算法的性质,
N
L
−
m
e
a
n
s
NL-means
NL−means最有利的情况是纹理或周期情况。在这种情况下,对于每个像素
i
i
i,我们都可以找到具有非常相似配置的大量样本集。参见图2 e)的一个周期图像的
N
L
−
m
e
a
n
s
NL-means
NL−means算法的权重分布示例。图3比较了一个自然纹理的NL-means和局部平滑滤波器的性能。
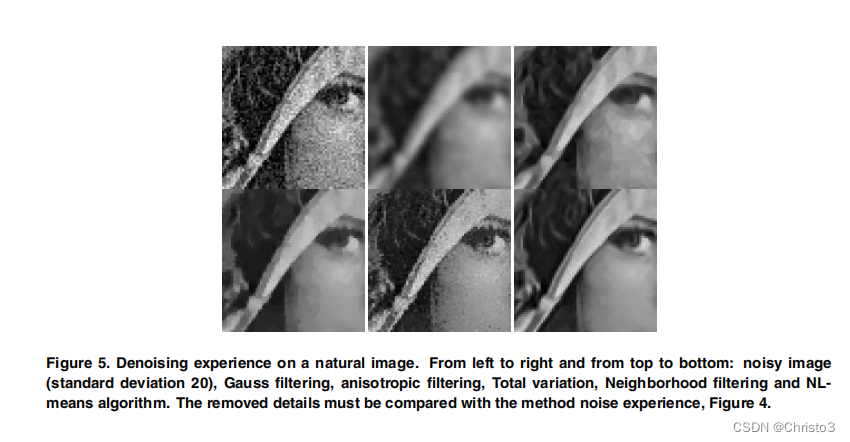
自然图像也有足够的冗余度,可以通过NL-means进行恢复。平面区域在同一对象内部呈现了大量类似的配置,见图2 (a).直线或弯曲的边有一条具有相似配置的完整像素线,见图2 (b)和©.此外,自然图像允许我们在遥远的像素中找到许多类似的配置,如图2 (f)所示。图5显示了一个关于自然图像的实验。这个经验必须与图4进行比较,在图4中,我们显示了原始图像的方法噪声。恢复图像的模糊或退化结构与方法噪声的明显结构相一致。
4 参考
非局部均值去噪(NL-means)
积分图像的应用(二):非局部均值去噪(NL-means)