文章:Performance Analysis of ROS2
作者:Deepak Charan Logavaseekaran, Rakshith Macha Billava
编辑:点云PCL
欢迎各位加入知识星球,获取PDF论文,欢迎转发朋友圈。文章仅做学术分享,如有侵权联系删文。未经博主同意请勿擅自转载。
公众号致力于点云处理,SLAM,三维视觉,高精地图等领域相关内容的干货分享,欢迎各位加入,有兴趣的可联系dianyunpcl@163.com。未经作者允许请勿转载,欢迎各位同学积极分享和交流。
背景介绍
ROS(机器人操作系统)是一个开源框架,用于促进机器人应用程序的开发。ROS有助于管理复杂性并促进应用程序的快速原型开发。使用ROS框架的主要优势之一是ROS提供的互操作性和模块化性。它支持多种编程语言,包括Python和C++,并提供即插即用的节点结构,甚至跨多个设备的网络环境中也可以使用。ROS1最初是由Willow Garage于2007年创建的,在爱好者中非常流行。然而,它也有自己的缺陷,为了满足需求,ROS2被开发出来。ROS2采用完全不同的架构,提供更好的模块化和平台无关的支持,ROS2承诺在不同编程语言之间提供类似的API,并通过分层实现加快新功能的部署速度,其中底层基础库对于所有编程语言都保持相同。ROS2还提供了一个集中化的系统,每个节点都能够发现其他节点,支持异步服务和动作,并且取消了对ROS主节点的依赖。ROS2使用DDS中间件,因此提供了所有相关的服务质量策略,它还提供了各种调试和可视化工具,并且还扩展了对Windows和macOS的支持。尽管ROS2被研究人员和爱好者广泛使用,但在实时环境中其性能仍存在一些问题。在本研究中,我们评估了ROS2的性能,并了解其在实时生态系统中的相关性。
本文任务是分析ROS2节点之间的通信性能,记录了执行分析的过程和所得结果。
解决方案描述
硬件说明
本评估的所有测试都是在NVIDIA Jetson Orin开发套件上进行的,该套件配备了12核ARM Cortex A78处理器和64GB eMMC固态硬盘。使用的是搭载Jetson Orin设备的Jetson JetPack SDK 5.1.1,运行着Ubuntu 22.04(Linux Kernel 5.10.X)操作系统,主要使用ROS2 Humble进行测试。
rclpy vs rclcpp
rclpy和rclcpp是ROS2的客户端API,用于设置/配置节点或与ROS2核心进行交互,它们分别是Python和C++的实现,大部分API及其使用方式相似。然而根据我们发现的一个问题ros2 latency repository,rclpy在发布大型数据时比rclcpp慢30倍至100倍。该问题已在ROS2 Foxy发布之前得到解决和合并。我们能够克隆展示该问题的存储库,并且能够以最小的更改运行测试,确认性能差异并非30倍的数量级。
为了评估rclcpp和rclpy之间的性能差异,我们创建了一个简单的测试,发布一块数据并测量这两种实现发布消息所需的时间。我们首先生成要发布的数据并实例化一个定时器,定时器在调用发布API之前启动,并在发布调用之后立即停止,在rclpy和rclcpp的实现中,方法保持一致,我们观察到,rclpy发布消息所需的时间始终比rclcpp多约6倍,如图1所示。

图1:rclpy与rclcpp发布时间
接着进行了测试,比较了rclpy和rclcpp实现的延迟,为了计算延迟,首先创建了具有所需字节数的消息,然后记录纪元时间并调用发布API,立即在发布时间之后,将纪元时间发送到订阅者,在订阅者节点中,我们在接收到消息时立即记录纪元时间,然后接收发布时间并计算差值以获取消息的延迟,此测试重复进行约15次,并将15个结果的平均值用于我们的评估。我们观察到,rclpy实现的延迟约为rclcpp实现的3倍,如图2所示。
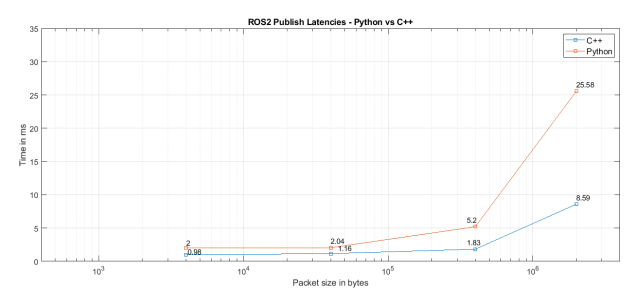
图2:rclpy与rclcpp延迟
由于实验室中使用了多个设备上的多个ROS2版本,我们还评估了ROS2版本,以查看不同版本对结果是否有影响。我们在ROS2 Humble和Foxy版本上运行了相同的延迟测试,这个测试使用了rclcpp在Humble和Foxy版本上的实现,根据我们的观察,我们没有找到任何确凿的证据表明一个版本比另一个版本更好,如图3所示,尽管对于较大的消息,Foxy的表现稍好一些。

图3:ROS2 Humble与Foxy延迟
由于ROS2使用DDS中间件,它本身也提供了各种QoS策略,为了本研究的目的,我们想评估使用可靠和尽力QoS策略的影响。在前面的评估中使用的延迟测试也在这里使用,只是修改了QoS策略,同样地,我们无法找到一个相对于另一个的明显改进,如图4所示。由于测试是在只有两个节点的情况下进行的,因此没有网络流量,这意味着没有或几乎没有数据包丢失,因此,我们推断无论是最佳尽力还是可靠的QoS策略实现,都会发送类似的数据而无需重复,这可能是结果相似的原因。

图4:ROS2可靠与尽力QoS
专家建议
在ROS2方面的经验,Marc提出了以下建议:
* 在ROS2的C++实现中使用事件执行器(event executor)。
* 通过Linux操作系统关闭CPU的IDLE模式。
* 将CPU密集型任务固定在单独的CPU核心上。
* 将Linux调度程序更改为循环轮询(Round Robin)。
* 将多个节点编译到单个进程中,避免使用IPC,并利用共享内存。
在采纳这些建议后,我们发现对于我们特定的测试用例,这并没有显著改善延迟, 此外,我们与Peter Gabriel Adamczyk教授及其学生Yisen Wang和Kieran Nichols取得了联系。尽管他们没有测试过以MB为单位发送大型消息的ROS2,但他们提到他们对ROS2的经验有些相似,他们还建议使用实时Linux内核,并在ROS2连接中使用UDP而不是TCP,由于我们的所有节点都在单个设备上运行,网络协议的选择对我们的实验并不适用,然而,我们希望在将来考虑使用Linux的RT PREEMPT补丁。
结束语
根据上述研究结果,可以明显看出ROS2的C++实现在速度方面优于Python版本,然而尽管ROS2开发人员努力改进实时性能,但该框架对于时间关键和实时系统仍然不够适用。我们的测试结果表明与ROS2在实时场景下所提供的优势相比,其引入的消息传输开销过大,因此,目前阶段不建议将ROS2用于实时应用。
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除

扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入知识星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享与合作方式:微信“cloudpoint9527”(备注:姓名+学校/公司+研究方向) 联系邮箱:dianyunpcl@163.com。
点一下“在看”你会更好看耶