文章目录
- 原理图查找空闲的I2C
- EEPROM芯片
- 改设备树
- 编写驱动
- 驱动端
- 设备端
- 驱动端和设备端编译成驱动模块
- 应用层的测试代码
原理图查找空闲的I2C
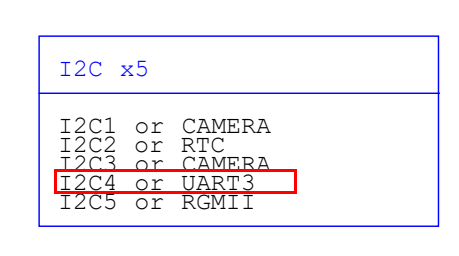
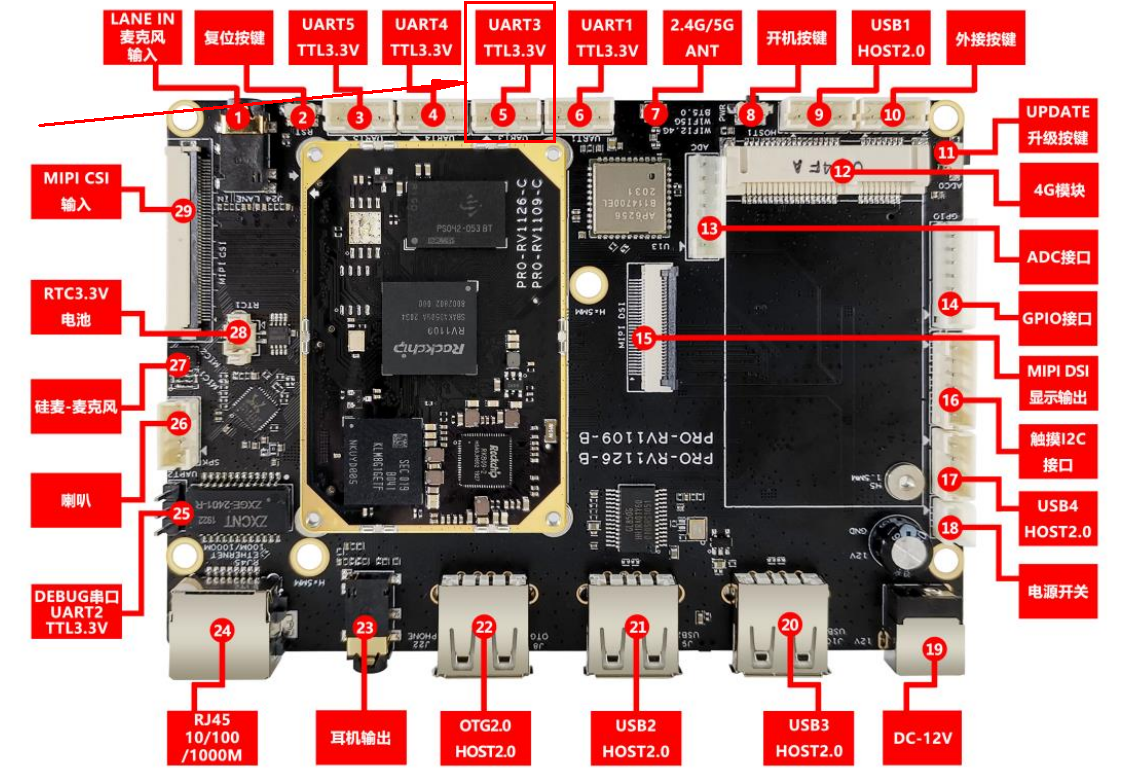
由上面可以知道,空闲了I2C4接口,然后也引出来了。
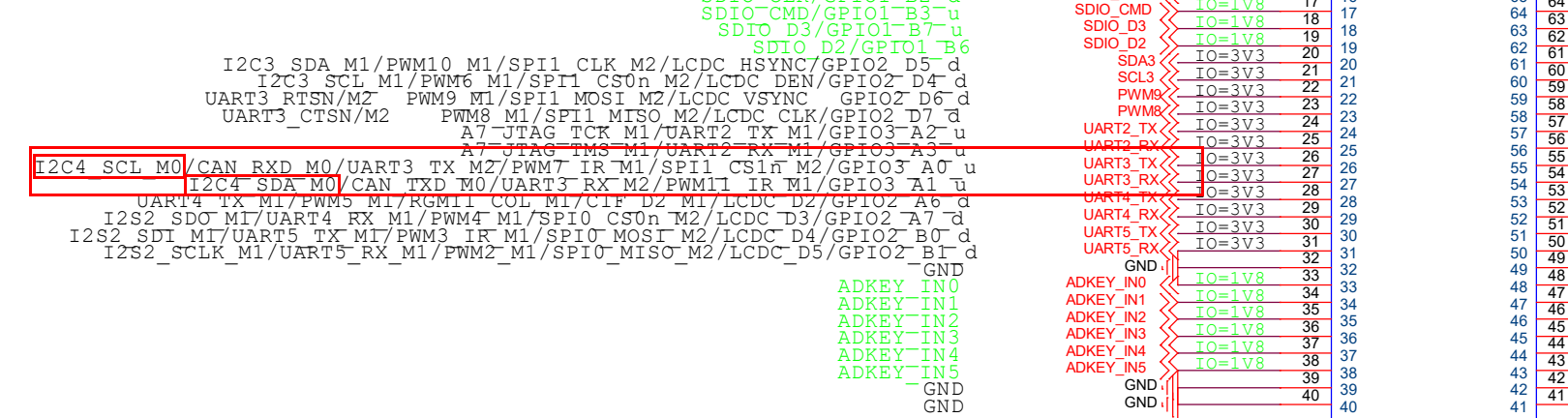
再找原理图找到具体引脚:
- I2C4_SCL:GPIO3_A0
- I2C4_SDA:GPIO3_A1
EEPROM芯片
我手上这款:
- 第一行丝印:ATMLH825
- 第二行丝印:2ECL Y
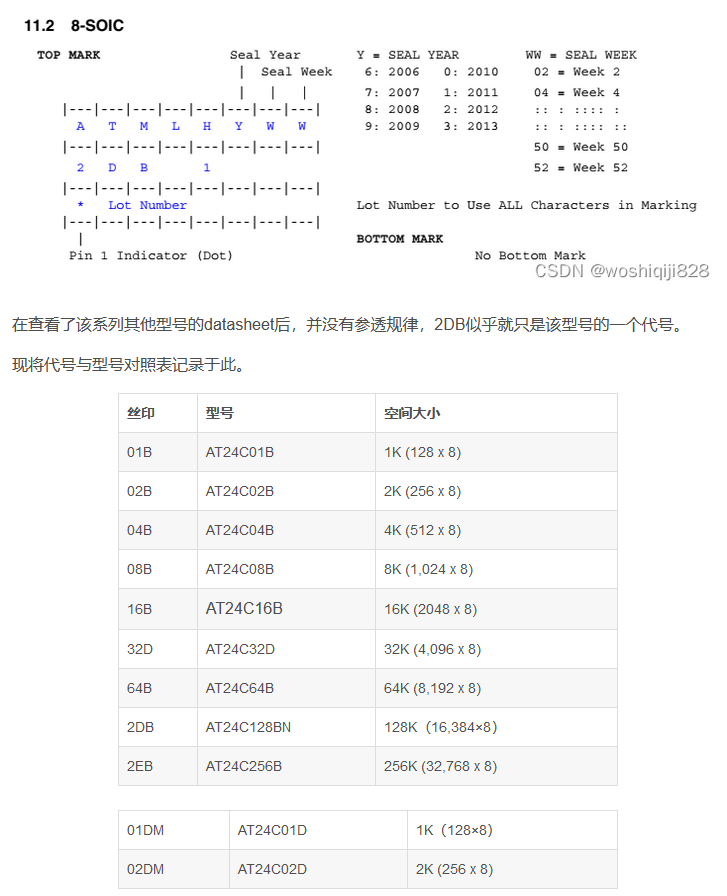
由上表可知是256KB的EEPROM。
该EEPROM的IIC地址是0x50。
改设备树
kernel/arch/arm/boot/dts/rongpin/rv1126_1109_common.dtsi
&i2c4 {
status = "okay";
eeprom@50 {
status = "okay";
compatible = "atmel,at24c256B";
reg = <0x50>;
};
};
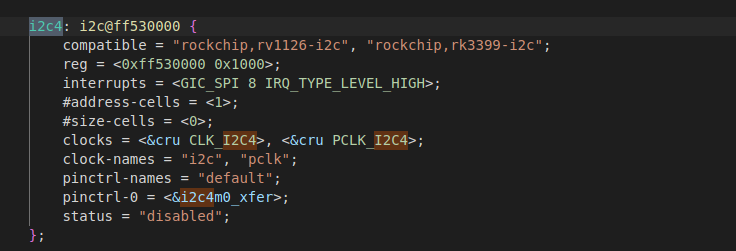
看看顶层设备树kernel/arch/arm/boot/dts/rv1126.dtsi关于I2C4的描述,这里不用改,贴出来看看:
i2c4: i2c@ff530000 {
compatible = "rockchip,rv1126-i2c", "rockchip,rk3399-i2c";
reg = <0xff530000 0x1000>;
interrupts = <GIC_SPI 8 IRQ_TYPE_LEVEL_HIGH>;
#address-cells = <1>;
#size-cells = <0>;
clocks = <&cru CLK_I2C4>, <&cru PCLK_I2C4>;
clock-names = "i2c", "pclk";
pinctrl-names = "default";
pinctrl-0 = <&i2c4m0_xfer>;
status = "disabled";
};
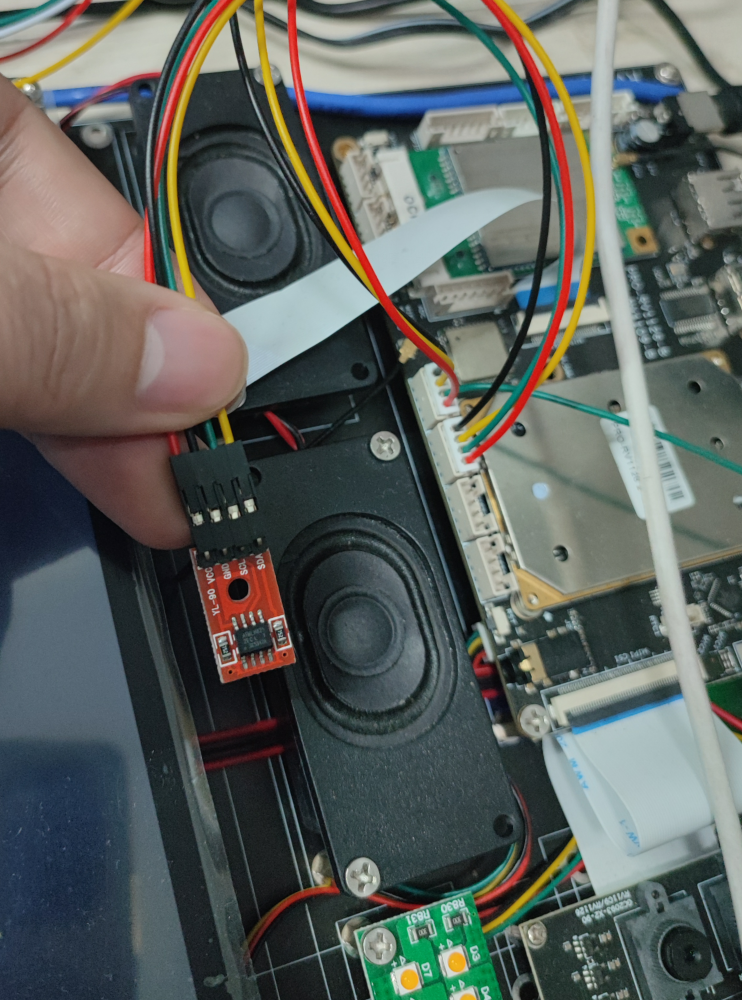
把EEPROM模块接上板子后,使用I2Cdetect测试工具进行测试:
[root@RV1126_RV1109:/mnt/nfs]# i2cdetect -y 4
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: 50 -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
在地址0x50有响应。
编写驱动
下面使用IIC子系统框架编写EEPROM驱动。驱动端使用杂项设备字符驱动框架。
驱动端
iic_drv.c
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/i2c.h>
#include <linux/delay.h>
#include <linux/interrupt.h>
#include <asm/uaccess.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/slab.h>
#include <linux/uaccess.h>
#include <linux/miscdevice.h>
static struct i2c_client *eeprom_client;
#define MAX_SIZE 255 //EEPROM大小
#define EEPROM_PAGE 16 //页字节大小
static u8 eeprom_buff[255];
static int rv1126_open(struct inode *inode, struct file *file)
{
printk("rv1126_open-->ok\n");
return 0;
}
static ssize_t rv1126_read(struct file *file, char __user *buf, size_t size, loff_t *seek)
{
unsigned long err;
//判断位置是否超出范围
if(*seek+size>MAX_SIZE)
{
size=MAX_SIZE-*seek;
}
//读取数据
i2c_smbus_read_i2c_block_data(eeprom_client,*seek,size,eeprom_buff);
err=copy_to_user(buf,eeprom_buff,size);
if(err!=0)return -1;
*seek+=size;
return size;
}
static ssize_t rv1126_write(struct file *file, const char __user *buf, size_t size, loff_t *seek)
{
size_t write_ok_cnt=0;
unsigned long err;
int write_byte=0;
u8 *write_p=eeprom_buff;
err=copy_from_user(eeprom_buff,buf,size);
if(err!=0)return -1;
//判断位置是否超出范围
if(*seek+size>MAX_SIZE)
{
size=MAX_SIZE-*seek;
}
while(1)
{
if(size>EEPROM_PAGE)
{
write_byte=EEPROM_PAGE;
size-=EEPROM_PAGE;
}
else
{
write_byte=size;
}
//写数据
i2c_smbus_write_i2c_block_data(eeprom_client,*seek,write_byte,write_p);
*seek+=write_byte;
write_p+=write_byte;
write_ok_cnt+=write_byte; //记录写成功的字节数
//等待写完成
msleep(10);
if(write_byte==size)break; //写完毕
}
return write_ok_cnt;
}
/*
filp:待操作的设备文件file结构体指针
off:待操作的定位偏移值(可正可负)
whence:待操作的定位起始位置
返回:返回移位后的新文件读、写位置,并且新位置总为正值
定位起始位置
SEEK_SET:0,表示文件开头
SEEK_CUR:1,表示当前位置
SEEK_END:2,表示文件尾
*/
static loff_t rv1126_llseek(struct file *filp, loff_t offset, int whence)
{
loff_t newpos = 0;
switch(whence)
{
case SEEK_SET:
newpos = offset;
break;
case SEEK_CUR:
newpos = filp->f_pos + offset;
break;
case SEEK_END:
if(MAX_SIZE+offset>=MAX_SIZE)
{
newpos=MAX_SIZE;
}
else
{
newpos = MAX_SIZE + offset;
}
break;
default:
return -EINVAL;//无效的参数
}
filp->f_pos = newpos;
return newpos;
}
static int rv1126_release(struct inode *inode, struct file *file)
{
printk("rv1126_release-->ok\n");
return 0;
}
static struct file_operations fops=
{
.open=rv1126_open,
.read=rv1126_read,
.write=rv1126_write,
.release=rv1126_release,
.llseek=rv1126_llseek
};
/*
Linux内核管理驱动---设备号
设备号是一个unsigned int 的变量--32位。
设备号=主设备号+次设备号
*/
static struct miscdevice misc=
{
.minor = MISC_DYNAMIC_MINOR, /*次设备号填255表示自动分配 主设备号固定为10*/
.name = "rv1126_eeprom", /*/dev目录下文件名称*/
.fops = &fops, /*文件操作接口*/
};
static int rv1126_probe(struct i2c_client *client, const struct i2c_device_id *device_id)
{
printk("probe调用成功:%#X\n",client->addr);
eeprom_client=client;
/*1. 杂项设备的注册函数*/
misc_register(&misc);
return 0;
}
static int rv1126_remove(struct i2c_client *client)
{
/*2. 杂项设备的注销函数*/
misc_deregister(&misc);
printk("remove调用成功.\n");
return 0;
}
static struct i2c_device_id id_table[]=
{
{"eeprom", 0},
{}
};
MODULE_DEVICE_TABLE(i2c, id_table);
static const struct of_device_id eeprom_of_match[] = {
{ .compatible = "atmel,at24c256B" },
{ }
};
MODULE_DEVICE_TABLE(of, eeprom_of_match);
static struct i2c_driver drv=
{
.probe=rv1126_probe,
.remove=rv1126_remove,
.driver=
{
.name="at24c256B",
.of_match_table = of_match_ptr(eeprom_of_match),
},
.id_table=id_table
};
static int __init rv1126_drv_init(void)
{
/*注册IIC驱动端*/
i2c_add_driver(&drv);
printk("IIC驱动端: 驱动安装成功\n");
return 0;
}
static void __exit rv1126_drv_cleanup(void)
{
/*注销IIC驱动端*/
i2c_del_driver(&drv);
printk("IIC驱动端: 驱动卸载成功\n");
}
module_init(rv1126_drv_init); /*驱动入口--安装驱动的时候执行*/
module_exit(rv1126_drv_cleanup); /*驱动出口--卸载驱动的时候执行*/
MODULE_LICENSE("GPL"); /*设置模块的许可证--GPL*/
设备端
iic_dev.c
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/i2c.h>
#include <linux/gpio.h>
static struct i2c_client *i2c_dev=NULL;
static struct i2c_adapter *adap=NULL;
static struct i2c_board_info info=
{
.type="rv1126_eeprom",
.addr=0x50, /*设备地址*/
};
static int __init rv1126_drv_init(void)
{
/*根据总线编号获取是适配器*/
adap=i2c_get_adapter(0);
/*注册IIC设备端*/
i2c_dev=i2c_new_device(adap,&info);
printk("IIC设备端: 驱动安装成功\n");
return 0;
}
static void __exit rv1126_drv_cleanup(void)
{
/*注销IIC设备*/
i2c_unregister_device(i2c_dev);
i2c_put_adapter(adap);
printk("IIC设备端: 驱动卸载成功\n");
}
module_init(rv1126_drv_init); /*驱动入口--安装驱动的时候执行*/
module_exit(rv1126_drv_cleanup); /*驱动出口--卸载驱动的时候执行*/
MODULE_LICENSE("GPL"); /*设置模块的许可证--GPL*/
驱动端和设备端编译成驱动模块
Makefile
KER_DRI:=/home/liefyuan/rv1126/rp_rv1126_sdk/kernel/
# 定义当前目录
PWD:=$(shell pwd)
all:
make -C $(KER_DRI) M=$(PWD) modules
obj-m += iic_dev.o
obj-m += iic_drv.o
clean:
rm -rf *.order *o *.symvers *.mod.c *.mod *.ko
会得到:
- iic_drv.ko
- iic_dev.ko
应用层的测试代码
app.c
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#define EEPROM_DEV "/dev/rv1126_eeprom"
int main(int argc,char **argv)
{
/*1. 打开设备文件*/
int fd=open(EEPROM_DEV,O_RDWR);
if(fd<0)
{
printf("%s 设备驱动打开失败.\n",EEPROM_DEV);
return 0;
}
/*3.读写数据*/
unsigned char buff[255];
int cnt;
int i;
for(i=0;i<255;i++)buff[i]=i;
cnt=write(fd,buff,255);
printf("write成功:%d Byte\n",cnt);
//偏移文件指针
lseek(fd,SEEK_SET,0);
unsigned char buff_r[255];
cnt=read(fd,buff_r,255);
printf("read成功:%d Byte\n",cnt);
for(i=0;i<cnt;i++)
{
printf("%d ",buff_r[i]);
}
printf("\n");
return 0;
}
编译:
arm-linux-gnueabihf-gcc app.c
测试记录:
[root@RV1126_RV1109:/mnt/nfs]# insmod iic_dev.ko
[ 6401.060250] IIC设备端: 驱动安装成功
[root@RV1126_RV1109:/mnt/nfs]# insmod iic_drv.ko
[ 6407.774268] probe调用成功:0X50
[root@RV1126_RV1109:/mnt/nfs]# [ 6407.776211] IIC驱动端: 驱动安装成功
[root@RV1126_RV1109:/mnt/nfs]# ls /dev/
block media0 rfkill v4l-subdev11 video26
bus media1 rga v4l-subdev2 video27
char media2 rtc v4l-subdev3 video28
console media3 rtc0 v4l-subdev4 video29
cpu_dma_latency media4 rv1126_eeprom v4l-subdev5 video3
disk mem serial v4l-subdev6 video30
dri memory_bandwidth shm v4l-subdev7 video31
fb0 mmcblk0 snd v4l-subdev8 video32
fd mmcblk0boot0 stderr v4l-subdev9 video33
full mmcblk0boot1 stdin vendor_storage video34
galcore mmcblk0p1 stdout video0 video35
gpiochip0 mmcblk0p2 tty video1 video36
gpiochip1 mmcblk0p3 ttyFIQ0 video10 video37
gpiochip2 mmcblk0p4 ttyS0 video11 video38
gpiochip3 mmcblk0p5 ttyS4 video12 video39
gpiochip4 mmcblk0p6 ttyS5 video13 video4
gpiochip5 mmcblk0p7 ttyUSB0 video14 video40
hidraw0 mmcblk0p8 ttyUSB1 video15 video41
hidraw1 mmcblk0rpmb ttyUSB2 video16 video42
hwrng mpp_service ttyUSB3 video17 video43
i2c-0 network_latency ubi_ctrl video18 video44
i2c-1 network_throughput uhid video19 video5
i2c-2 null urandom video2 video6
i2c-3 pmsg0 usb video20 video7
i2c-4 ppp usb-ffs video21 video8
iio:device0 ptmx v4l video22 video9
input ptp0 v4l-subdev0 video23 zero
kmsg pts v4l-subdev1 video24 zram0
log random v4l-subdev10 video25
[root@RV1126_RV1109:/mnt/nfs]# ./a.out
[ 6453.425909] rv1126_open-->ok
write成功:255 Byte
read成功:255 Byte
255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 255 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254
[ 6453.77834] rv1126_release-->ok
[root@RV1126_RV1109:/mnt/nfs]#
OK!