Lattice Planner相关背景和更正式的公式推导可以直接参考其原始论文《Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenét Frame》(ICRA 2010),本文侧重于Lattic planner理论和代码的结合。
1. Lattice Planner基本流程
Lattice Planner算法(含轨迹跟踪算法)的基本流程如下所示:

- 在笛卡尔坐标系中获取车辆的全局规划路径点(包括起始点和终点)的坐标,如有必要可以按照固定距离重新采样,并进一步计算其角度和曲率的信息;
- 将上述全局路径作为在Frenet坐标系中进行局部规划的参考线(即坐标轴),转化至Frenet坐标系后获取自车当前在Frenet坐标系下的坐标;
- 基于上述信息,进行局部轨迹采样,其中构成轨迹需要横纵向解耦,即需要Frenet坐标系中横向( d , d ˙ , d ¨ d, \dot{d}, \ddot{d} d,d˙,d¨等,也可以用符号 l l l表示横向),纵向( s , s ˙ , s ¨ s,\dot{s}, \ddot{s} s,s˙,s¨等)和时间尺度( t t t)的信息。横向上基于状态空间(即离散化采点两倍最大道路宽度),局部轨迹的预测时间(例如后续2s-3s的轨迹并进行离散化采点)进行采样,纵向上基于速度和时间序列进行采样,并根据区间起始点终止点的边界条件分别构造横向(五次多项式)和纵向(四次多项式)轨迹;
- 将上述轨迹重新转化为笛卡尔坐标系,并重新计算角度和曲率等信息,利用预先设定的损失函数、车辆约束条件(最大速度,最大加速度等)、避障所需障碍物信息筛选出最优的局部轨迹;
- 控制部分:横向根据LQR控制器进行位姿跟踪,纵向根据PID控制器进行速度跟踪;
2. 重要模块所涉及的相关理论知识
2.1. Frenet与笛卡尔坐标系相互转化
显式转化:利用公式
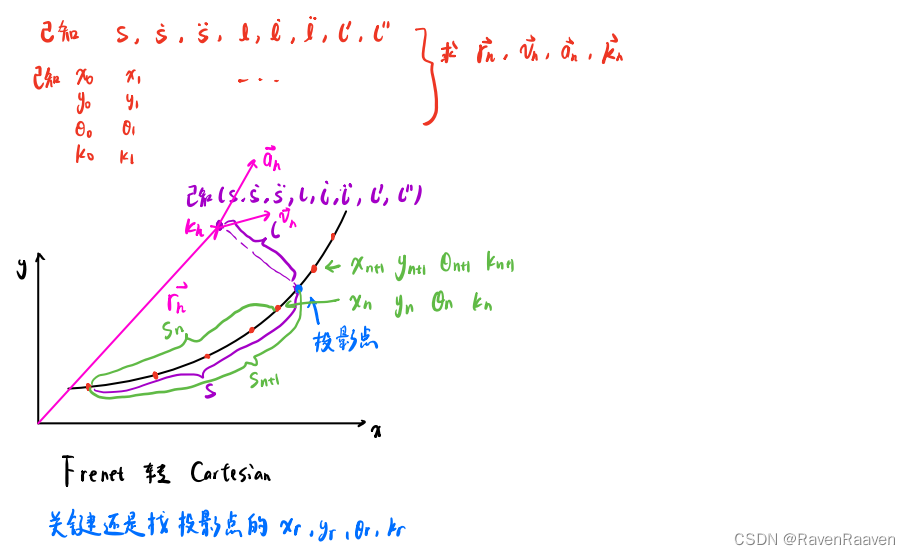
显示的Frenet与笛卡尔坐标系的相互转化公式推导很复杂,这里可以参考up老王的视频进一步学习(其主要思路是利用向量法进行推导),本文只贴出视频中二者的转换公式结论:
直角坐标系转化为Frenet坐标系
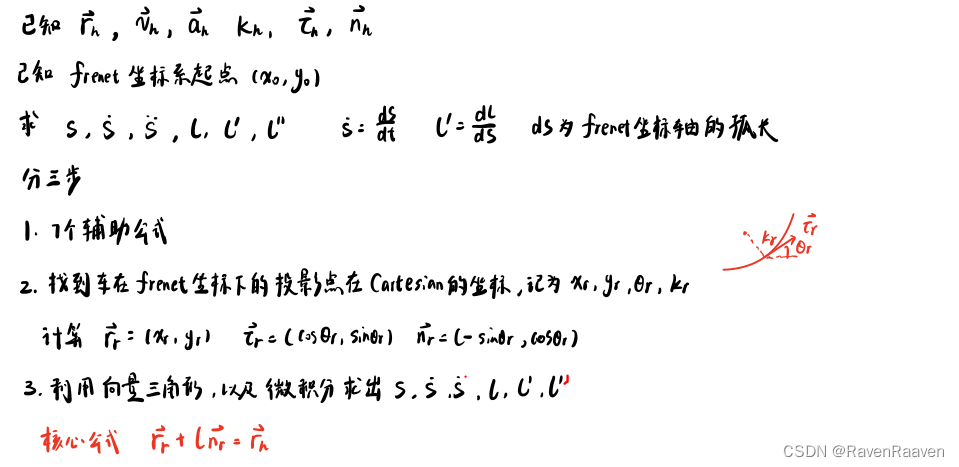
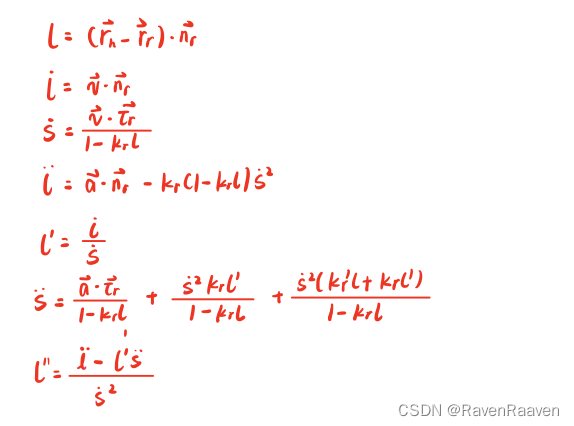
Frenet坐标系转化为直角坐标系(仅包括转化所需要的输入输出)
利用三次样条曲线(Cubic Spline)进行隐式求解
本文所介绍的代码实现版本中使用cubic spline进行隐式的坐标转换。本节先对cubic spline中使用natural spline边界条件的方法进行详细推导,内容参考该博客。具体如何实现cubic spline进行Frenet与笛卡尔坐标系的转换见代码实现部分。
 用cubic spline进行Frenet到笛卡尔坐标系转化的思路是:分别将笛卡尔坐标系中的
x
,
y
x,y
x,y坐标信息当作为关于Frenet坐标系中
s
s
s(即每个坐标对应的行驶距离)的函数,即
x
=
f
(
s
)
,
y
=
g
(
s
)
x=f(s),y=g(s)
x=f(s),y=g(s),
f
(
⋅
)
,
g
(
⋅
)
f(\cdot), g(\cdot)
f(⋅),g(⋅)为不同参数下构造出的cubic spline,后续Frenet转化为Cartesian的过程则使用上述函数进行插值求解。上图以笛卡尔坐标系下坐标轴
x
x
x为例,展示了该方向的离散点。离散化后的自变量区间为
[
(
s
0
,
s
1
)
,
(
s
1
,
s
2
)
,
…
,
(
s
n
−
1
,
s
n
)
]
[(s_0,s_1),(s_1,s_2),\dots, (s_{n-1},s_n)]
[(s0,s1),(s1,s2),…,(sn−1,sn)],总共
n
n
n个区间,
4
n
4n
4n个参数,
4
n
4n
4n个边界条件。第
i
i
i个区间对应的cubic spline函数记为
S
i
(
s
)
S_i(s)
Si(s),其本身、一二阶导数公式如下:
用cubic spline进行Frenet到笛卡尔坐标系转化的思路是:分别将笛卡尔坐标系中的
x
,
y
x,y
x,y坐标信息当作为关于Frenet坐标系中
s
s
s(即每个坐标对应的行驶距离)的函数,即
x
=
f
(
s
)
,
y
=
g
(
s
)
x=f(s),y=g(s)
x=f(s),y=g(s),
f
(
⋅
)
,
g
(
⋅
)
f(\cdot), g(\cdot)
f(⋅),g(⋅)为不同参数下构造出的cubic spline,后续Frenet转化为Cartesian的过程则使用上述函数进行插值求解。上图以笛卡尔坐标系下坐标轴
x
x
x为例,展示了该方向的离散点。离散化后的自变量区间为
[
(
s
0
,
s
1
)
,
(
s
1
,
s
2
)
,
…
,
(
s
n
−
1
,
s
n
)
]
[(s_0,s_1),(s_1,s_2),\dots, (s_{n-1},s_n)]
[(s0,s1),(s1,s2),…,(sn−1,sn)],总共
n
n
n个区间,
4
n
4n
4n个参数,
4
n
4n
4n个边界条件。第
i
i
i个区间对应的cubic spline函数记为
S
i
(
s
)
S_i(s)
Si(s),其本身、一二阶导数公式如下:
{
S
i
(
s
)
=
a
i
+
b
i
(
s
−
s
i
)
+
c
i
(
s
−
s
i
)
2
+
d
i
(
s
−
s
i
)
3
S
i
′
(
s
)
=
b
i
+
2
c
i
(
s
−
s
i
)
+
3
d
i
(
s
−
s
i
)
2
S
i
′
′
(
s
)
=
2
c
i
+
6
d
i
(
s
−
s
i
)
\begin{cases} S_i(s)=a_i+b_i(s-s_i)+c_i(s-s_i)^2+d_i(s-s_i)^3 \\ S_i'(s)= b_i+2c_i(s-s_i)+3d_i(s-s_i)^2 \\ S_i''(s)= 2c_i+6d_i(s-s_i) \end{cases}
⎩
⎨
⎧Si(s)=ai+bi(s−si)+ci(s−si)2+di(s−si)3Si′(s)=bi+2ci(s−si)+3di(s−si)2Si′′(s)=2ci+6di(s−si)
所需要的边界条件包括:
- 所有点满足区间的边界插值点条件,除去端点中间 n − 1 n-1 n−1个点对应 2 ( n − 1 ) 2(n-1) 2(n−1)个条件,加上2个端点总共 2 n 2n 2n个条件,公式为: S i ( s i ) = x i , ( i = 0 , 1 , … , n − 1 ) S_i(s_i)=x_i,(i=0,1,\dots, n-1) Si(si)=xi,(i=0,1,…,n−1)和 S i ( s i + 1 ) = x i + 1 , ( i = 0 , 1 , … , n − 1 ) S_i(s_{i+1})=x_{i+1}, (i=0,1,\dots, n-1) Si(si+1)=xi+1,(i=0,1,…,n−1);
- n − 1 n-1 n−1个内部点的一阶导数应该是连续的,即 S i ′ ( s i + 1 ) = S i + 1 ′ ( s i + 1 ) , ( i = 0 , 1 , … , n − 2 ) S_i'(s_{i+1})=S_{i+1}'(s_{i+1}),(i=0,1,\dots, n-2) Si′(si+1)=Si+1′(si+1),(i=0,1,…,n−2),总共 n − 1 n-1 n−1个条件;
- n − 1 n-1 n−1个内部点的二阶导数连续,即 S i ′ ′ ( s i + 1 ) = S i + 1 ′ ′ ( s i + 1 ) , ( i = 0 , 1 , … , n − 2 ) S_i''(s_{i+1})=S_{i+1}''(s_{i+1}),(i=0,1,\dots, n-2) Si′′(si+1)=Si+1′′(si+1),(i=0,1,…,n−2),总共 n − 1 n-1 n−1个条件;
- 上述总共是 4 n − 2 4n-2 4n−2个条件,剩下的2个条件有三种方式,本文采用其中的natural spline方式,即 S 0 ′ ′ ( s 0 ) = 0 , S n − 1 ( s n ) = 0 S_0''(s_0)=0,\ S_{n-1}(s_n)=0 S0′′(s0)=0, Sn−1(sn)=0;
将上述边界条件带入cubic spline函数和其导数的公式中,进行求解:
- 对于边界条件1的第一个条件,可得 S i ( s i ) = a i = x i S_i(s_i)=a_i=x_i Si(si)=ai=xi;
- 对于边界条件1的第二个条件,令 h i = s i + 1 − s i h_i=s_{i+1}-s_i hi=si+1−si, S i ( s i + 1 ) = a i + b i h i + c i h i 2 + d i h i 3 = x i + 1 S_i(s_{i+1})=a_i+b_ih_i+c_ih_i^2+d_ih_i^3=x_{i+1} Si(si+1)=ai+bihi+cihi2+dihi3=xi+1
- 对于上述边界条件2,等式左边为 S i ′ ( s i + 1 ) = b i + 2 c i h i + 3 d i h i 2 S_i'(s_{i+1})=b_i+2c_ih_i+3d_ih_i^2 Si′(si+1)=bi+2cihi+3dihi2,等式右边的 S i + 1 ′ ( s ) = b i + 2 c i ( s − s i + 1 ) + 3 d i ( s − s i + 1 ) 2 S_{i+1}'(s)=b_i+2c_i(s-s_{i+1})+3d_i(s-s_{i+1})^2 Si+1′(s)=bi+2ci(s−si+1)+3di(s−si+1)2,因此代入 s i + 1 s_{i+1} si+1可得: S i + 1 ′ ( s i + 1 ) = b i + 1 S_{i+1}'(s_{i+1})=b_{i+1} Si+1′(si+1)=bi+1,整个边界条件2构成的公式为: b i + 2 c i h i + 3 d i h i 2 = b i + 1 b_i+2c_ih_i+3d_ih_i^2=b_{i+1} bi+2cihi+3dihi2=bi+1;
- 同理,对于边界条件3可得公式: 2 c i + 6 d i h i = 2 c i + 1 2c_i+6d_ih_i=2c_{i+1} 2ci+6dihi=2ci+1;
- 根据natural spline的条件可得 c 0 = 0 , c n = 0 c_0=0, c_n=0 c0=0,cn=0;
整理一下上述公式:
{
a
i
=
x
i
(
1
)
b
i
h
i
+
c
i
h
i
2
+
d
i
h
i
3
=
x
i
+
1
−
x
i
(
2
)
b
i
+
2
c
i
h
i
+
3
d
i
h
i
2
=
b
i
+
1
(
3
)
c
i
+
3
d
i
h
i
=
c
i
+
1
(
4
)
\begin{cases} a_i=x_i & (1)\\ b_ih_i+c_ih_i^2+d_ih_i^3=x_{i+1}-x_i & (2) \\ b_i+2c_ih_i+3d_ih_i^2=b_{i+1} & (3)\\ c_i+3d_ih_i=c_{i+1} & (4) \end{cases}
⎩
⎨
⎧ai=xibihi+cihi2+dihi3=xi+1−xibi+2cihi+3dihi2=bi+1ci+3dihi=ci+1(1)(2)(3)(4)
接下来先将参数
b
i
,
d
i
b_i,d_i
bi,di转化成与
c
i
c_i
ci相关的公式,先整理上述公式
(
4
)
(4)
(4)的
d
i
d_i
di,再得到
b
i
,
c
i
b_i,c_i
bi,ci之间的关系,可得:
{
d
i
=
c
i
+
1
−
c
i
3
h
i
b
i
=
x
i
+
1
−
x
i
h
i
−
c
i
h
i
−
h
i
3
(
c
i
+
1
−
c
i
)
\begin{cases} d_i=\frac{c_{i+1}-c_i}{3h_i}\\ b_i=\frac{x_{i+1}-x_{i}}{h_i}-c_ih_i-\frac{h_i}{3}(c_{i+1}-c_i) \\ \end{cases}
{di=3hici+1−cibi=hixi+1−xi−cihi−3hi(ci+1−ci)
再将所得公式代入上述公式
(
3
)
(3)
(3)可得:
h
i
c
i
+
2
(
h
i
+
h
i
+
1
)
c
i
+
1
+
h
i
+
1
c
i
+
2
=
3
(
x
i
+
2
−
x
i
+
1
h
i
+
1
−
x
i
+
1
−
x
i
h
i
)
,
i
=
0
,
1
,
…
,
n
−
2
h_ic_i+2(h_i+h_{i+1})c_{i+1}+h_{i+1}c_{i+2}=3\left( \frac{x_{i+2}-x_{i+1}}{h_{i+1}}-\frac{x_{i+1}-x_{i}}{h_{i}}\right),i=0,1,\dots,n-2
hici+2(hi+hi+1)ci+1+hi+1ci+2=3(hi+1xi+2−xi+1−hixi+1−xi),i=0,1,…,n−2
此时算上natural spline的条件
c
0
=
0
,
c
n
=
0
c_0=0, c_n=0
c0=0,cn=0可以得到所有
n
n
n个关于
c
c
c的方程:
{
c
0
=
0
,
h
0
c
0
+
2
(
h
0
+
h
1
)
c
1
+
h
1
c
2
=
3
(
x
2
−
x
1
h
1
−
x
1
−
x
0
h
0
)
,
h
1
c
1
+
2
(
h
1
+
h
2
)
c
2
+
h
2
c
3
=
3
(
x
3
−
x
2
h
2
−
x
2
−
x
1
h
1
)
,
…
h
n
−
2
c
n
−
2
+
2
(
h
n
−
2
+
h
n
−
1
)
c
n
−
1
+
h
n
−
1
c
n
=
3
(
x
n
−
x
n
−
1
h
n
−
1
−
x
n
−
1
−
x
n
−
2
h
n
−
2
)
,
c
n
=
0
\begin{cases} c_0=0,\\ h_0c_0+2(h_0+h_{1})c_{1}+h_{1}c_{2}=3\left( \frac{x_{2}-x_{1}}{h_{1}}-\frac{x_{1}-x_{0}}{h_{0}}\right), \\ h_1c_1+2(h_1+h_{2})c_{2}+h_{2}c_{3}=3\left( \frac{x_{3}-x_{2}}{h_{2}}-\frac{x_{2}-x_{1}}{h_{1}}\right), \\ \dots \\ h_{n-2}c_{n-2}+2(h_{n-2}+h_{n-1})c_{n-1}+h_{n-1}c_{n}=3\left( \frac{x_{n}-x_{n-1}}{h_{n-1}}-\frac{x_{n-1}-x_{n-2}}{h_{n-2}}\right), \\ c_n=0\\ \end{cases}
⎩
⎨
⎧c0=0,h0c0+2(h0+h1)c1+h1c2=3(h1x2−x1−h0x1−x0),h1c1+2(h1+h2)c2+h2c3=3(h2x3−x2−h1x2−x1),…hn−2cn−2+2(hn−2+hn−1)cn−1+hn−1cn=3(hn−1xn−xn−1−hn−2xn−1−xn−2),cn=0
整理成矩阵的形式为:
[ 1 0 0 ⋯ 0 h 0 2 ( h 0 + h 1 ) h 1 0 0 h 1 2 ( h 1 + h 2 ) h 2 0 0 0 h 2 2 ( h 2 + h 3 ) h 3 ⋮ ⋮ ⋱ ⋱ ⋱ 0 ⋯ 0 h n − 2 2 ( h n − 2 + h n − 1 ) h n − 1 0 0 0 ⋯ ⋯ 1 ] ⋅ [ c 0 c 1 c 2 ⋮ c n − 1 c n ] = 3 [ 0 x 2 − x 1 h 1 − x 1 − x 0 h 0 x 3 − x 2 h 2 − x 2 − x 1 h 1 ⋮ x n − x n − 1 h n − 1 − x n − 1 − x n − 2 h n − 2 0 ] = 0 \begin{bmatrix} 1&0&0 & &\cdots & 0\\ h_{0}&2(h_{0}+h_{1})&h_{1} &0& \\ 0 & h_{1}&2(h_{1}+h_{2})&h_{2} &0 &\\ 0 & 0& h_{2}&2(h_{2}+h_{3})&h_{3} & \vdots\\ \vdots & & \quad\ddots&\quad\ddots &\quad\ddots& \\ \\ 0 &\cdots & 0& h_{n-2}&2(h_{n-2}+h_{n-1})&h_{n-1}\\ 0&0&0 &\cdots &\cdots &1 \end{bmatrix} \cdot\begin{bmatrix} c_0 \\ c_1\\ c_2\\ \vdots \\ c_{n-1} \\ c_n \end{bmatrix}= 3\begin{bmatrix} 0\\ \frac{x_{2}-x_{1}}{h_{1}}-\frac{x_{1}-x_{0}}{h_{0}}\\ \frac{x_{3}-x_{2}}{h_{2}}-\frac{x_{2}-x_{1}}{h_{1}}\\ \vdots\\ \frac{x_{n}-x_{n-1}}{h_{n-1}}-\frac{x_{n-1}-x_{n-2}}{h_{n-2}}\\ 0 \end{bmatrix}=0 1h000⋮0002(h0+h1)h10⋯00h12(h1+h2)h2⋱000h22(h2+h3)⋱hn−2⋯⋯0h3⋱2(hn−2+hn−1)⋯0⋮hn−11 ⋅ c0c1c2⋮cn−1cn =3 0h1x2−x1−h0x1−x0h2x3−x2−h1x2−x1⋮hn−1xn−xn−1−hn−2xn−1−xn−20 =0
因此所有参数都可以由
c
i
c_i
ci推导出:
{
a
i
=
x
i
b
i
=
x
i
+
1
−
x
i
h
i
−
c
i
h
i
−
h
i
3
(
c
i
+
1
−
c
i
)
d
i
=
c
i
+
1
−
c
i
3
h
i
\begin{cases} a_i=x_i \\ b_i=\frac{x_{i+1}-x_{i}}{h_i}-c_ih_i-\frac{h_i}{3}(c_{i+1}-c_i)\\ d_i=\frac{c_{i+1}-c_i}{3h_i}\\ \end{cases}
⎩
⎨
⎧ai=xibi=hixi+1−xi−cihi−3hi(ci+1−ci)di=3hici+1−ci
2.2 局部轨迹采样(横向与纵向)
2.2.1 横向采样
总体思路:横向采样可以在状态空间或控制空间进行采样,本文介绍在状态空间中,即利用结构化道路的最大宽度,进行横向采样的方法。采样点示意图如下所示:
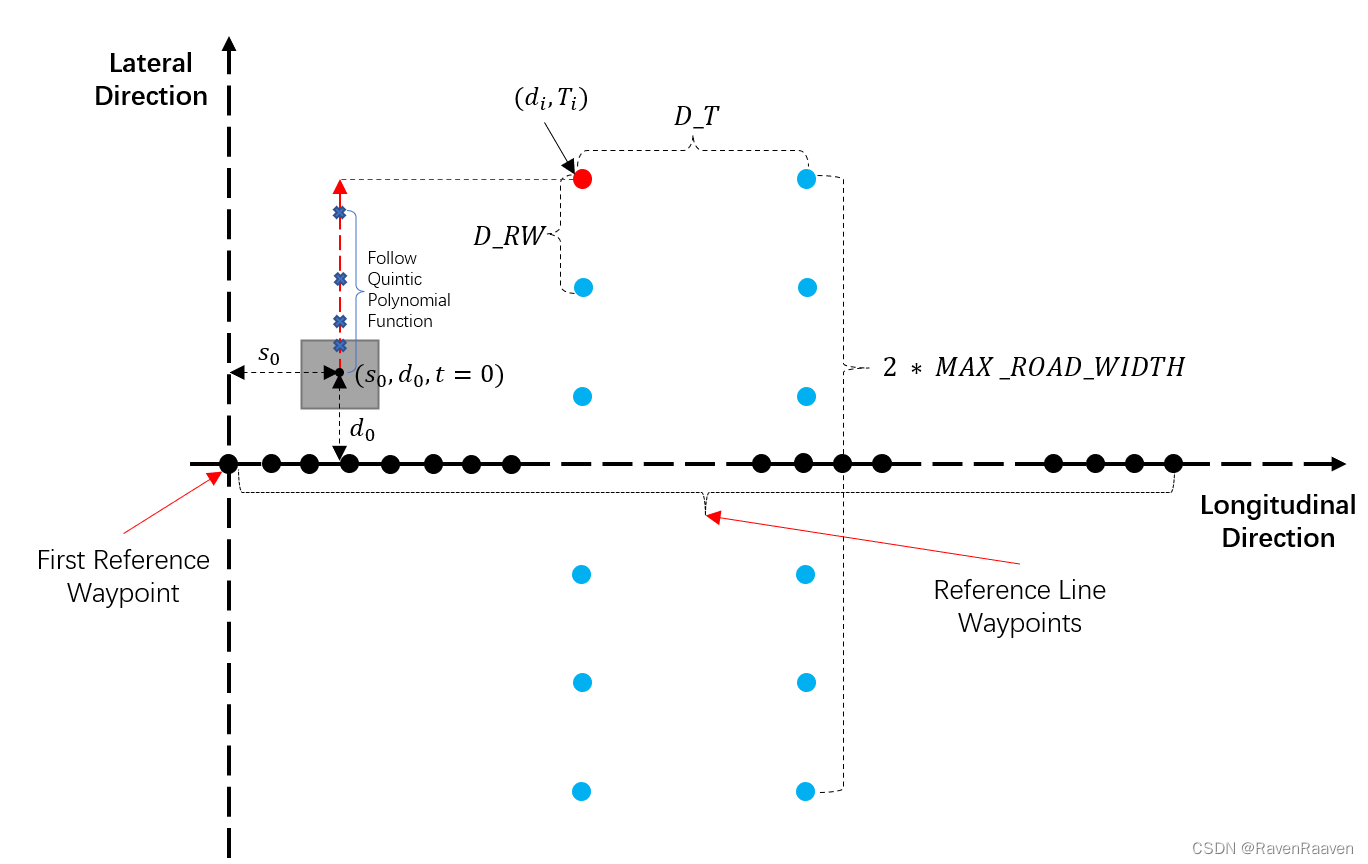
根据已有的采样点,还需要将点与点之间连接起来构成横向轨迹,采用的方法是给定边界条件后根据五次多项式进行连接,五次多项式的公式和一二阶导数公式如下:
{ d ( t ) = a 5 t 5 + a 4 t 4 + a 3 t 3 + a 2 t 2 + a 1 t + a 0 d ˙ ( t ) = 5 a 5 t 4 + 4 a 4 t 3 + 3 a 3 t 2 + 2 a 2 t + a 1 d ¨ ( t ) = 20 a 5 t 3 + 12 a 4 t 2 + 6 a 3 t + 2 a 2 \begin{cases} d(t)=a_5t^5+a_4t^4+a_3t^3+a_2t^2+a_1t+a_0 \\ \dot{d}(t)=5a_5t^4+4a_4t^3+3a_3t^2+2a_2t+a_1\\ \ddot{d}(t)=20a_5t^3+12a_4t^2+6a_3t+2a_2 \end{cases} ⎩ ⎨ ⎧d(t)=a5t5+a4t4+a3t3+a2t2+a1t+a0d˙(t)=5a5t4+4a4t3+3a3t2+2a2t+a1d¨(t)=20a5t3+12a4t2+6a3t+2a2
求解五次多项式系数的思路是通过边界条件求解方程中的参数(6个边界条件组成6个方程组以求解6个参数),区间
[
0
,
T
i
]
[0,T_i]
[0,Ti]的起始点、终止点边界条件分别有三个,包括位置、速度、加速度条件,分别记为
d
(
0
)
=
x
s
,
d
˙
(
0
)
=
v
s
,
d
¨
(
0
)
=
a
s
d(0)=x_s,\dot{d}(0)=v_s,\ddot{d}(0)=a_s
d(0)=xs,d˙(0)=vs,d¨(0)=as和
d
(
T
i
)
=
x
e
,
d
˙
(
T
i
)
=
v
e
,
d
¨
(
T
i
)
=
a
e
d(T_i)=x_e,\dot{d}(T_i)=v_e,\ddot{d}(T_i)=a_e
d(Ti)=xe,d˙(Ti)=ve,d¨(Ti)=ae,整理可得:
{
d
(
0
)
=
x
s
=
a
0
,
d
˙
(
0
)
=
v
s
=
a
1
,
d
¨
(
0
)
=
a
s
=
2
a
2
→
a
2
=
a
s
2
d
(
T
i
)
=
a
5
T
i
5
+
a
4
T
i
4
+
a
3
T
i
3
+
a
2
T
i
2
+
a
1
T
i
+
a
0
=
x
e
,
d
˙
(
T
i
)
=
5
a
5
T
i
4
+
4
a
4
T
i
3
+
3
a
3
T
i
2
+
2
a
2
T
i
+
a
1
=
v
e
,
d
¨
(
T
i
)
=
20
a
5
T
i
3
+
12
a
4
T
i
2
+
6
a
3
T
i
+
2
a
2
=
a
e
\begin{cases} d(0)=x_s=a_0,\\ \dot{d}(0)=v_s=a_1,\\ \ddot{d}(0)=a_s=2a_2 \to a_2=\frac{a_s}{2}\\ d(T_i)=a_5T_i^5+a_4T_i^4+a_3T_i^3+a_2T_i^2+a_1T_i+a_0=x_e,\\ \dot{d}(T_i)=5a_5T_i^4+4a_4T_i^3+3a_3T_i^2+2a_2T_i+a_1=v_e,\\ \ddot{d}(T_i)=20a_5T_i^3+12a_4T_i^2+6a_3T_i+2a_2=a_e \end{cases}
⎩
⎨
⎧d(0)=xs=a0,d˙(0)=vs=a1,d¨(0)=as=2a2→a2=2asd(Ti)=a5Ti5+a4Ti4+a3Ti3+a2Ti2+a1Ti+a0=xe,d˙(Ti)=5a5Ti4+4a4Ti3+3a3Ti2+2a2Ti+a1=ve,d¨(Ti)=20a5Ti3+12a4Ti2+6a3Ti+2a2=ae
整理成矩阵形式:
[
T
i
3
T
i
4
T
i
5
3
T
i
2
4
T
i
3
5
T
i
4
6
T
i
12
T
i
2
20
T
i
3
]
⋅
[
a
3
a
4
a
5
]
=
[
x
e
−
a
0
−
a
1
T
i
−
a
2
T
i
2
v
e
−
a
1
−
2
a
2
T
i
a
e
−
2
a
2
]
\begin{bmatrix} T_i^3 & T_i^4 & T_i^5\\ 3T_i^2 & 4T_i^3 & 5T_i^4\\ 6T_i & 12T_i^2 & 20T_i^3 \end{bmatrix} \cdot\begin{bmatrix} a_3 \\ a_4 \\a_5 \end{bmatrix} =\begin{bmatrix} x_e-a_0-a_1T_i-a_2T_i^2\\ v_e-a_1-2a_2T_i\\ a_e-2a_2 \end{bmatrix}
Ti33Ti26TiTi44Ti312Ti2Ti55Ti420Ti3
⋅
a3a4a5
=
xe−a0−a1Ti−a2Ti2ve−a1−2a2Tiae−2a2
最终用eigen库求解得到对应的参数即可。
2.2.2 纵向采样
总体思路:纵向采样与横向采样类似,只不过是依据给定的目标速度进行采样,点与点之间的连接方式则采用四次多项式。四次多项式的公式和一二阶导数公式如下:
{ s ( t ) = a 4 t 4 + a 3 t 3 + a 2 t 2 + a 1 t + a 0 s ˙ ( t ) = 4 a 4 t 3 + 3 a 3 t 2 + 2 a 2 t + a 1 s ¨ ( t ) = 12 a 4 t 2 + 6 a 3 t + 2 a 2 \begin{cases} s(t)=a_4t^4+a_3t^3+a_2t^2+a_1t+a_0 \\ \dot{s}(t)=4a_4t^3+3a_3t^2+2a_2t+a_1\\ \ddot{s}(t)=12a_4t^2+6a_3t+2a_2 \end{cases} ⎩ ⎨ ⎧s(t)=a4t4+a3t3+a2t2+a1t+a0s˙(t)=4a4t3+3a3t2+2a2t+a1s¨(t)=12a4t2+6a3t+2a2
求解四次多项式系数的思路与上述五次多项式相同,用5个边界条件组成的5个方程组以求解5个参数,区间
[
0
,
T
i
]
[0,T_i]
[0,Ti]的起始点边界条件分别有三个,包括位置、速度、加速度条件,分别记为
s
(
0
)
=
x
s
,
s
˙
(
0
)
=
v
s
,
s
¨
(
0
)
=
a
s
s(0)=x_s,\dot{s}(0)=v_s,\ddot{s}(0)=a_s
s(0)=xs,s˙(0)=vs,s¨(0)=as,终止点的边界条件只需要两个:
s
˙
(
T
i
)
=
v
e
,
s
¨
(
T
i
)
=
a
e
\dot{s}(T_i)=v_e,\ddot{s}(T_i)=a_e
s˙(Ti)=ve,s¨(Ti)=ae,整理可得:
{
s
(
0
)
=
x
s
=
a
0
,
s
˙
(
0
)
=
v
s
=
a
1
,
s
¨
(
0
)
=
a
s
=
2
a
2
→
a
2
=
a
s
2
s
˙
(
T
i
)
=
4
a
4
T
i
3
+
3
a
3
T
i
2
+
2
a
2
T
i
+
a
1
=
v
e
,
s
¨
(
T
i
)
=
12
a
4
T
i
2
+
6
a
3
T
i
+
2
a
2
=
a
e
\begin{cases} s(0)=x_s=a_0,\\ \dot{s}(0)=v_s=a_1,\\ \ddot{s}(0)=a_s=2a_2 \to a_2=\frac{a_s}{2}\\ \dot{s}(T_i)=4a_4T_i^3+3a_3T_i^2+2a_2T_i+a_1=v_e,\\ \ddot{s}(T_i)=12a_4T_i^2+6a_3T_i+2a_2=a_e \end{cases}
⎩
⎨
⎧s(0)=xs=a0,s˙(0)=vs=a1,s¨(0)=as=2a2→a2=2ass˙(Ti)=4a4Ti3+3a3Ti2+2a2Ti+a1=ve,s¨(Ti)=12a4Ti2+6a3Ti+2a2=ae
整理成矩阵形式:
[
3
T
i
2
4
T
i
3
6
T
i
12
T
i
2
]
⋅
[
a
3
a
4
]
=
[
v
e
−
a
1
−
2
a
2
T
i
a
e
−
2
a
2
]
\begin{bmatrix} 3T_i^2 & 4T_i^3\\ 6T_i & 12T_i^2 \end{bmatrix} \cdot\begin{bmatrix} a_3 \\ a_4 \end{bmatrix} =\begin{bmatrix} v_e-a_1-2a_2T_i\\ a_e-2a_2 \end{bmatrix}
[3Ti26Ti4Ti312Ti2]⋅[a3a4]=[ve−a1−2a2Tiae−2a2]
最终用eigen库求解得到对应的参数即可。
2.3 筛选最优局部轨迹
筛选最优局部轨迹依靠最小化损失函数,并判断轨迹是否满足约束条件(车辆的最大速度、最大加速度、最大曲率)与避障条件,其中损失函数构造包括三个部分,代码实现中的损失函数形式为:
{
Lateral
:
C
d
=
k
j
J
t
(
d
(
t
)
)
+
k
t
T
+
k
d
d
2
Longitudinal
:
C
v
=
k
j
J
t
(
s
(
t
)
)
+
k
t
T
+
k
d
s
2
Total
:
C
f
=
k
l
a
t
C
d
+
k
l
o
n
g
C
v
\begin{cases} \textbf{Lateral}:\quad C_d=k_jJ_t(d(t))+k_tT+k_d d^2\\ \textbf{Longitudinal}:\quad C_v=k_jJ_t(s(t))+k_tT+k_d s^2\\ \textbf{Total}:\quad C_f=k_{lat}C_d+k_{long}C_v\end{cases}
⎩
⎨
⎧Lateral:Cd=kjJt(d(t))+ktT+kdd2Longitudinal:Cv=kjJt(s(t))+ktT+kds2Total:Cf=klatCd+klongCv
3. 代码实现
本部分内容主要介绍深蓝学院《自动驾驶控制与规划》课程作业中的代码;首先看一下文件结构:

最重要的文件是frenet_optimal_trajectory.cpp和path_planning_node.cpp,包含了lattice planner算法的核心内容。接下来主要介绍两部分,一是利用cubic spline进行Frenet与笛卡尔坐标系的转化,二是局部轨迹采样的实现。
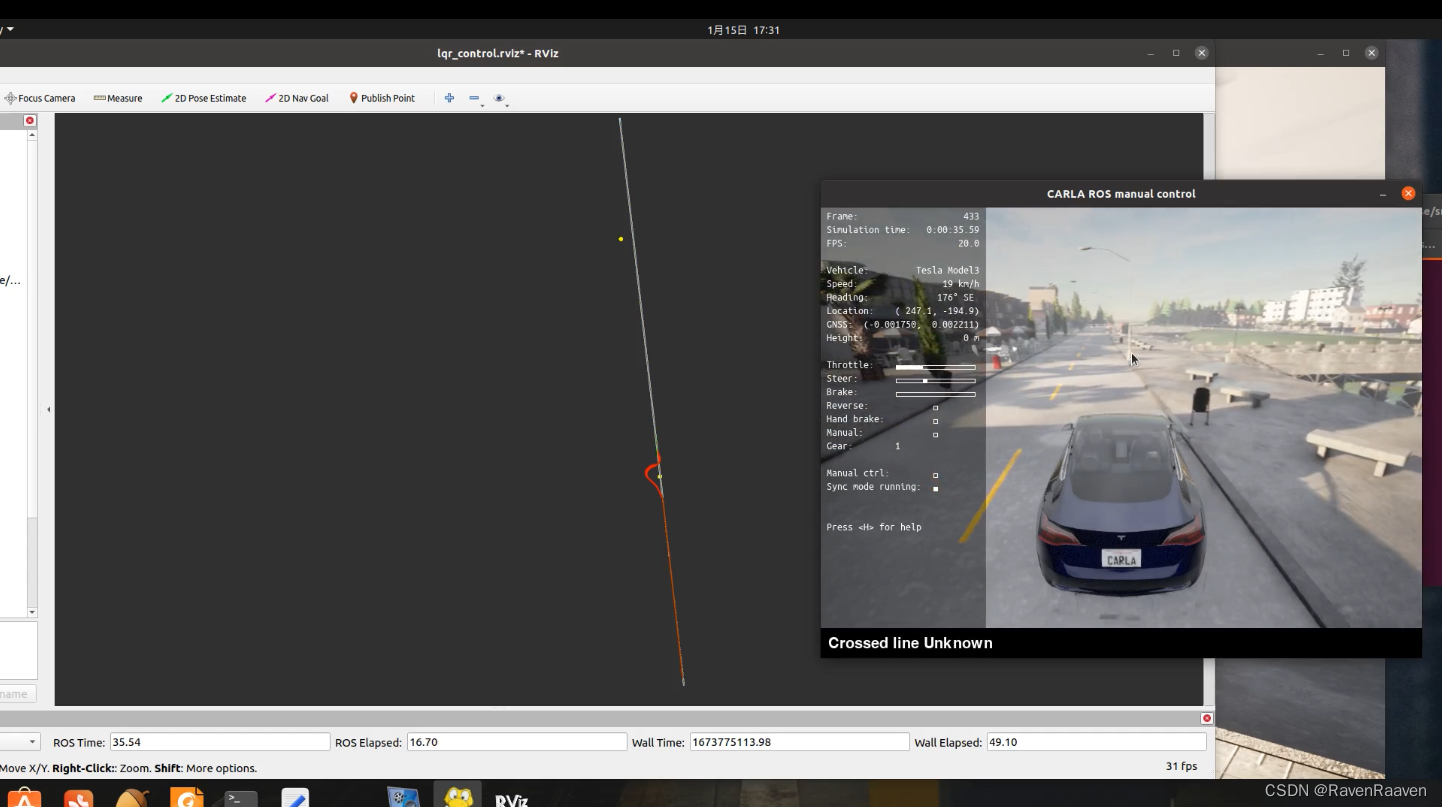
3.0 代码运行环境配置及目前运行效果
运行环境:Ubuntu 20.04, ROS1, Carla-ROS-bridge, CARLA 0.9.11, C++;
运行指令的顺序:先启动CARLA-ROS-bridge节点,再启动lattice planner;
代码运行截图如下图:
3.1 Cubic Spline实现Frenet到笛卡尔坐标系的转化
转化思路参考第二部分,代码实现部分就是创建一个类,在对象初始化的时候根据矩阵形式用eigen库求解对应的参数,之后若给定随意的自变量,利用二分查找的方式找到该值所在的区间,之后根据cubic spline公式求解即可。
class Spline {
public:
Vec_f x;
Vec_f y;
int nx;
Vec_f h;
Vec_f a;
Vec_f b;
Vec_f c;
// Eigen::VectorXf c;
Vec_f d;
Spline(){};
// d_i * (x-x_i)^3 + c_i * (x-x_i)^2 + b_i * (x-x_i) + a_i
Spline(Vec_f x_, Vec_f y_)
: x(x_), y(y_), nx(x_.size()), h(vec_diff(x_)), a(y_) {
Eigen::MatrixXf A = calc_A();
Eigen::VectorXf B = calc_B();
Eigen::VectorXf c_eigen = A.colPivHouseholderQr().solve(B);
float* c_pointer = c_eigen.data();
// Eigen::Map<Eigen::VectorXf>(c, c_eigen.rows(), 1) = c_eigen;
c.assign(c_pointer, c_pointer + c_eigen.rows());
for (int i = 0; i < nx - 1; i++) {
d.push_back((c[i + 1] - c[i]) / (3.0 * h[i]));
b.push_back((a[i + 1] - a[i]) / h[i] -
h[i] * (c[i + 1] + 2 * c[i]) / 3.0);
}
};
float calc(float t) {
if (t < x.front() || t > x.back()) {
throw std::invalid_argument(
"received value out of the pre-defined range");
}
int seg_id = bisect(t, 0, nx);
float dx = t - x[seg_id];
return a[seg_id] + b[seg_id] * dx + c[seg_id] * dx * dx +
d[seg_id] * dx * dx * dx;
};
float calc_d(float t) {
if (t < x.front() || t > x.back()) {
throw std::invalid_argument(
"received value out of the pre-defined range");
}
int seg_id = bisect(t, 0, nx - 1);
float dx = t - x[seg_id];
return b[seg_id] + 2 * c[seg_id] * dx + 3 * d[seg_id] * dx * dx;
}
float calc_dd(float t) {
if (t < x.front() || t > x.back()) {
throw std::invalid_argument(
"received value out of the pre-defined range");
}
int seg_id = bisect(t, 0, nx);
float dx = t - x[seg_id];
return 2 * c[seg_id] + 6 * d[seg_id] * dx;
}
private:
Eigen::MatrixXf calc_A() {
Eigen::MatrixXf A = Eigen::MatrixXf::Zero(nx, nx);
A(0, 0) = 1;
for (int i = 0; i < nx - 1; i++) {
if (i != nx - 2) {
A(i + 1, i + 1) = 2 * (h[i] + h[i + 1]);
}
A(i + 1, i) = h[i];
A(i, i + 1) = h[i];
}
A(0, 1) = 0.0;
A(nx - 1, nx - 2) = 0.0;
A(nx - 1, nx - 1) = 1.0;
return A;
};
Eigen::VectorXf calc_B() {
Eigen::VectorXf B = Eigen::VectorXf::Zero(nx);
for (int i = 0; i < nx - 2; i++) {
B(i + 1) = 3.0 * (a[i + 2] - a[i + 1]) / h[i + 1] -
3.0 * (a[i + 1] - a[i]) / h[i];
}
return B;
};
int bisect(float t, int start, int end) {
int mid = (start + end) / 2;
if (t == x[mid] || end - start <= 1) {
return mid;
} else if (t > x[mid]) {
return bisect(t, mid, end);
} else {
return bisect(t, start, mid);
}
}
};
二维的spline代码实现如下:
class Spline2D {
public:
Spline sx;
Spline sy;
Vec_f s;
Spline2D(Vec_f x, Vec_f y) {
s = calc_s(x, y);
sx = Spline(s, x);
sy = Spline(s, y);
};
Poi_f calc_postion(float s_t) {
float x = sx.calc(s_t);
float y = sy.calc(s_t);
return {{x, y}};
};
float calc_curvature(float s_t) {
float dx = sx.calc_d(s_t);
float ddx = sx.calc_dd(s_t);
float dy = sy.calc_d(s_t);
float ddy = sy.calc_dd(s_t);
return (ddy * dx - ddx * dy) / (dx * dx + dy * dy);
};
float calc_yaw(float s_t) {
float dx = sx.calc_d(s_t);
float dy = sy.calc_d(s_t);
return std::atan2(dy, dx);
};
private:
Vec_f calc_s(Vec_f x, Vec_f y) {
Vec_f ds;
Vec_f out_s{0};
Vec_f dx = vec_diff(x);
Vec_f dy = vec_diff(y);
for (unsigned int i = 0; i < dx.size(); i++) {
ds.push_back(std::sqrt(dx[i] * dx[i] + dy[i] * dy[i]));
}
Vec_f cum_ds = cum_sum(ds);
out_s.insert(out_s.end(), cum_ds.begin(), cum_ds.end());
return out_s;
};
};
3.2 局部轨迹采样(横向与纵向) 实现
代码实现中的局部轨迹采样如下代码所示:
FrenetPath FrenetOptimalTrajectory::frenet_optimal_planning(
Spline2D csp, const FrenetInitialConditions& frenet_init_conditions,
Vec_Poi ob) {
// 01 获取采样轨迹数组
Vec_Path fp_list = calc_frenet_paths(c_speed, c_d, c_d_d, c_d_dd, s0);
// 02 根据参考轨迹与采样的轨迹数组,计算frenet中的其他曲线参数,如航向角,曲率,ds等参数
calc_global_paths(fp_list, csp);
// 03 检查路径,通过限制做大速度,最大加速度,最大曲率与避障,选取可使用的轨迹数组
Vec_Path save_paths = check_paths(fp_list, ob);
float min_cost = numeric_limits<float>::max();
FrenetPath final_path;
for (auto path:save_paths){
if (path.cf <= min_cost){
min_cost = path.cf;
final_path = path;
}
}
return final_path;
}
其中子函数calc_frenet_paths包含了轨迹采样的核心逻辑,其代码由两部分组成,横向和纵向采样,此外,两个方向的采样都需要进行时间轴采样:
Vec_Path FrenetOptimalTrajectory::calc_frenet_paths(float c_speed, float c_d,
float c_d_d, float c_d_dd,
float s0) {
std::vector<FrenetPath> fp_list;
// 对横向位移 d 进行采样
for (float di = -1 * MAX_ROAD_WIDTH; di < MAX_ROAD_WIDTH; di += D_ROAD_W) { // sample every 1.0m
// 对纵向时间序列采样
for (float Ti = MINT; Ti < MAXT; Ti += DT) { //[2.0, 3.0, 0.2]
// 当 (di,Ti) 确定后,可获得一条连接当前状态与 (di, Ti) 的五次多项式轨迹曲线
FrenetPath fp;
QuinticPolynomial lat_qp(c_d, c_d_d, c_d_dd, di, 0.0, 0.0, Ti);
// 记录离散时间下对应的轨迹点
for (float t = 0; t < Ti; t += DT) {
fp.t.push_back(t);
fp.d.push_back(lat_qp.calc_point(t));
fp.d_d.push_back(lat_qp.calc_first_derivative(t));
fp.d_dd.push_back(lat_qp.calc_second_derivative(t));
fp.d_ddd.push_back(lat_qp.calc_third_derivative(t));
}
// 对纵向车速进行采样
for (float tv = TARGET_SPEED - D_T_S * N_S_SAMPLE;
tv < TARGET_SPEED + D_T_S * N_S_SAMPLE; tv += D_T_S) {
// 当 (vi, Ti) 确定后,可获得一条连接当前状态和 (vi, Ti) 的四次多项式轨迹曲线
FrenetPath fp_bot = fp;
QuarticPolynomial lon_qp(s0, c_speed, 0.0, tv, 0.0, Ti);
// 初始化最大速度和最大加速度
fp_bot.max_speed = std::numeric_limits<float>::min();
fp_bot.max_accel = std::numeric_limits<float>::min();
// 记录离散时间下对应的轨迹点
for (float t_ : fp.t) {
fp_bot.s.push_back(lon_qp.calc_point(t_));
fp_bot.s_d.push_back(lon_qp.calc_first_derivative(t_));
fp_bot.s_dd.push_back(lon_qp.calc_second_derivative(t_));
fp_bot.s_ddd.push_back(lon_qp.calc_third_derivative(t_));
// 更新最大加速度和最大速度
if (fp_bot.s_d.back() > fp_bot.max_speed) {
fp_bot.max_speed = fp_bot.s_d.back();
}
if (fp_bot.s_dd.back() > fp_bot.max_accel) {
fp_bot.max_accel = fp_bot.s_dd.back();
}
}
// 计算代价函数
float Jp = sum_of_power(fp.d_ddd); // square of jerk
float Js = sum_of_power(fp_bot.s_ddd); // square of jerk
// square of diff from target speed
float ds = (TARGET_SPEED - fp_bot.s_d.back());
fp_bot.cd = KJ * Jp + KT * Ti + KD * std::pow(fp_bot.d.back(), 2);
fp_bot.cv = KJ * Js + KT * Ti + KD * ds;
fp_bot.cf = KLAT * fp_bot.cd + KLON * fp_bot.cv;
// 将轨迹添加至候选轨迹中
fp_list.push_back(fp_bot);
}
}
}
return fp_list;
};