数值天气预报期末复习
文章目录
- 数值天气预报期末复习
- (零)重点需要掌握知识点
- (一)什么是数值天气预报
- (二)数值模式的分类
- (三)各坐标系下的大气运动方程组
- 3.1 局地直角坐标系
- 3.2 球坐标系
- 3.3 p坐标系
- 3.4 σ \sigma σ坐标系(重点掌握)
- sigma坐标系的定义
- sigma坐标系与p坐标系的转换
- sigma坐标系下梯度和气压梯度力的推导
- (四)地图投影坐标系
- 4.1 投影误差
- 4.2 投影分类
- 4.3 几个重要的基本概念
- 4.4 正形投影(保角投影)
- 4.5 圆锥投影放大系数
- 圆锥常数k求法
- 距离l求法
- 4.6 极射赤面投影
- 4.7 兰勃托投影
- 4.8 麦卡托投影
- 4.9 三种地图投影的特点
- (五)正交曲线坐标系
- 5.1 球坐标系下
- 5.2 地图投影z坐标系下
- 5.3 正交曲线坐标系下的几种表示
- 气压梯度
- 涡度表示
- 散度表示
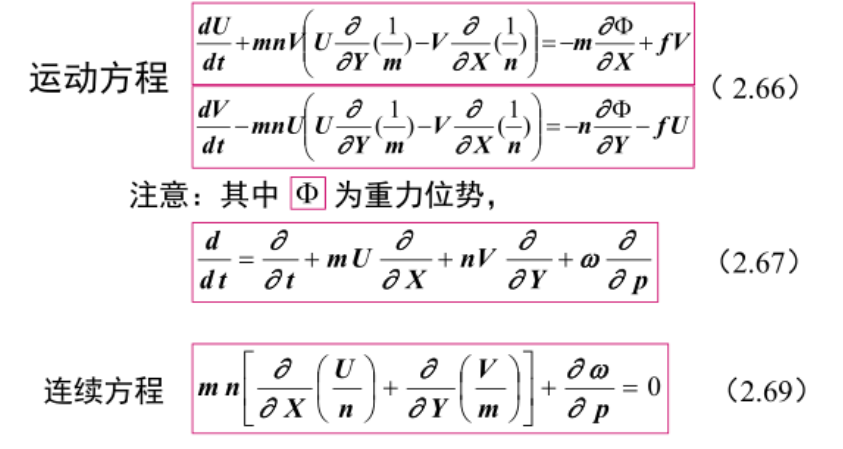
- 5.4 正交曲线坐标系的大气运动方程组
- (六)空间差分格式
- 6.1 空间差分格式
- 6.2 显示和隐式
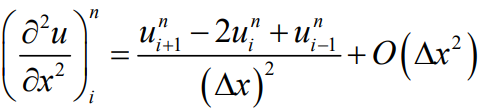
- 6.3 二阶偏导的表达式
- (七)差分方程基本性质
- 7.1 相容性(一致性)
- 7.2 误差的讨论
- 7.3 收敛性
- 7.4 稳定性
- 7.5 拉克斯等价定律
- (八)线性稳定性的证明方法
- 8.1 证明步骤
- (九)非线性稳定性
- 9.1 混淆误差
- 9.2 克服非线性不稳定的方法
- (十)空间平滑和滤波
- 10.1 三点平滑公式
- 10.2 滑动性能分析
- 10.3 正逆平滑
- 10.4 五点平滑
- 10.5 九点平滑
- (十一)误差分析
- 11.1 计算解误差
- 误差特点
- 减少误差方案
- 11.2 频率误差
- 误差特点
- 减小误差方案
- 11.3 相速度和群速度误差
- 误差特点
- 减小误差方案
- 11.4 小结
- (十二)常用的时间积分格式
- 12.1 前差(显示格式)
- 特点
- 12.2 中央差格式(显示格式)
- 特点
- 12.3 欧拉后差(显示格式)
- 特点
- 12.4 后差(隐式格式)
- 特点
- 12.5 梯形格式(隐式格式)
- 特点
- 12.6 半隐式格式(隐式格式)
- 特点
- 12.7 小结
- (十三)正压原始方程组模式
- 13.1 正压模式的物理假设
- 13.2 正压模式的预报方程组
- 13.3 方程组的积分性质
- 13.4 正压原始方程组的稳定性计算
- (十四)差分算符
- (十五)守恒的空间差分模式
- 15.1 一次守恒格式
- 通量形式的一次守恒
- 平流形式的一次守恒
- 缺点
- 15.2 二次守恒差分方程
- 通量格式
- 平流形式
- (十六)将方程组写到地图投影坐标系下
- 16.1 两种形式的微分方程组
- 16.2 两种形式的二次守恒差分方程组
- (十七)三步法时间积分格式
- (十八)斜压原始方程模式
- 18.1 仿地形高度sigma坐标系
- 18.2 斜压原始方程的积分性质
- 18.3 垂直积分格式
- (十九)物理过程参数化
- 19.1 次网格物理过程
- 19.2 辐射过程
- 19.3 边界层过程
- 19.4 湿热力过程
- 19.5 参数化存在的问题
- (二十)模式的初始条件和边界条件
- 20.1 资料初始化
- 20.2 静力初始化
- 20.3 动力初始化
- 20.4 变分初始化
- (二十一)资料同化
- (二十二)边界条件问题
- (二十三)谱模式
(零)重点需要掌握知识点
- sigma坐标系的表达式
- sigma坐标系气压梯度力的推导
- sigma坐标系垂直速度的推导
- 正形投影的特点
- 三种常用坐标系,适用范围
- 正交曲线坐标系,拉密系数和坐标变元和坐标线元的关系
- 正交曲线坐标系的梯度表达,散度表达,以及具体在球坐标系和地图投影坐标系中的表达
- 空间前差,后差,中央差,隐式后差写法
- 差分方程三个基本性质以及对应的含义
- 冯纽曼线性稳定性判据
- 三点平滑,五点平滑公式,正逆平滑,以及滑动因子S如何取可以滤去指定波长的波
- 混淆误差以及发生混淆误差之后误判的波长
- 误差分析,以及对应的解决方法
- 时间积分格式:显示+隐式
- 正压原始方程组包含方程和物理假设,积分性质,稳定情况的时间步长的取法
- 差分算符
- 通量和平流形式的一次和二次守恒格式的写法;以及将其算符写成差分形式的方法
- 欧拉后差+三步法积分的意义和表达式
- 仿地形高度sigma坐标系
- 物理过程参数化
- 资料初始化和资料同化
- 边界条件类型
- 谱模式和有限差分格式
- 几个推导:
- sigma坐标系垂直速度和气压梯度力;
- 地图投影坐标系和球坐标系下的拉密系数
- 三点平滑公式的响应函数推导
- 全球质量守恒推导
- 冯纽曼判据
- 用二次守恒格式写出方程
(一)什么是数值天气预报
给定初始和边界条件,通过数值方法求解大气运动方程组,由已知时刻的大气状态预报未来时刻的大气状态
预报需要:
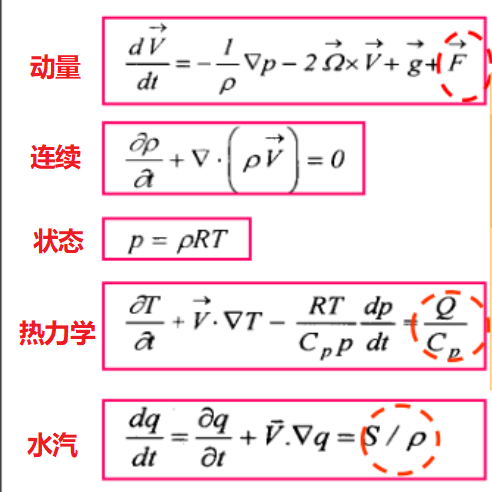
- 大气运动方程组
- 初始条件和边界条件
- 数值计算方案
- 算力
先根据预报结果进行形势预报,结合各国预报结果再进行要素预报,其中要素预报必须要进行订正,最后得到要素预报
数值预报想做的好需要:
- 动力气象学理论的发展,对大气运动状态的机理有更清晰的了解
- 大气探测技术的发展,提供更准确的初边条件
- 计算机技术和计算数学的发展
(二)数值模式的分类
原始方程模式:
- 正压原始模式
- 斜压原始模式
过滤模式:
- 准地转模式
- 非地转模式

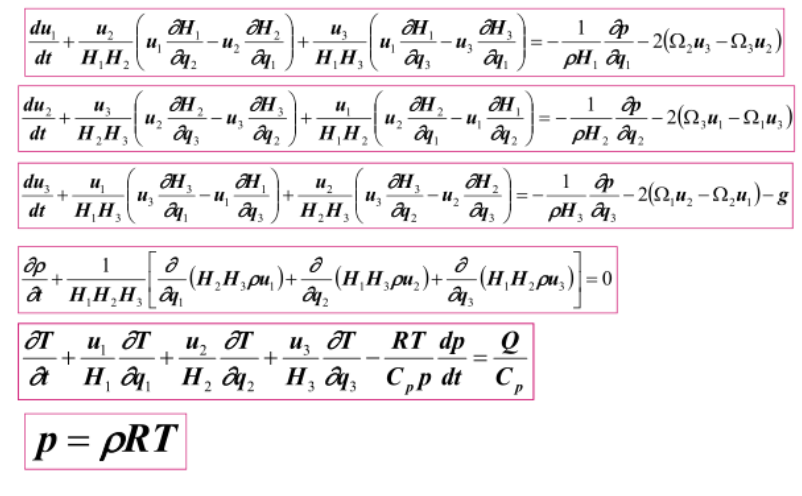
(三)各坐标系下的大气运动方程组
3.1 局地直角坐标系
对于非全球范围的大气运动通常采用局地直角坐标系,它保留了球坐标的框架,但忽略了球面曲率的影响
写成对时间偏导形式:
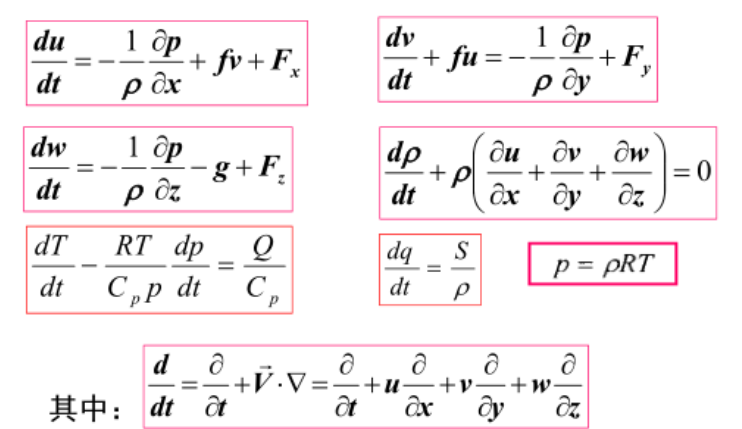
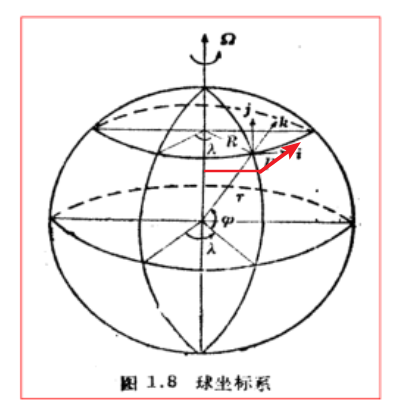
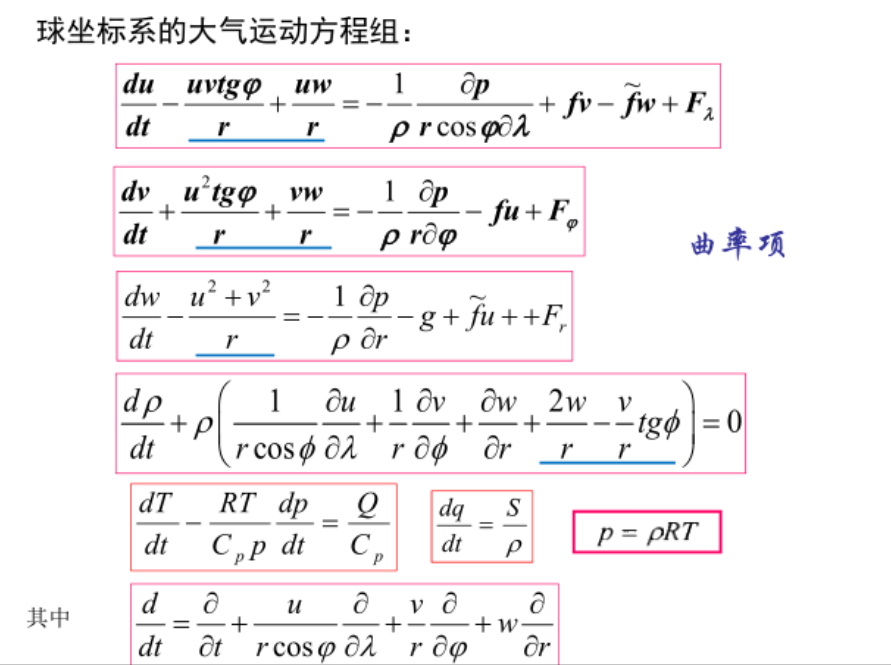
3.2 球坐标系
球坐标系中用 P = P ( λ , ϕ , r ) P=P(\lambda, \phi, r) P=P(λ,ϕ,r)来表示空间点,其中 λ 表示经度 , ϕ 表示纬度(仰角) , r 表示距离地心的距离 \lambda表示经度, \phi表示纬度(仰角), r表示距离地心的距离 λ表示经度,ϕ表示纬度(仰角),r表示距离地心的距离
球坐标系与局地直角坐标系转换关系:水平速度稍微需要理解以下,结合球坐标系的图就好理解了
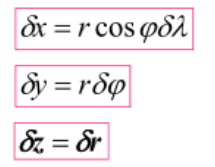
对时间求导得到速度的表达:
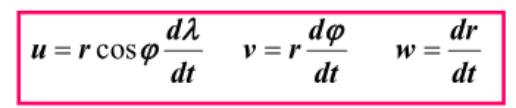
最终推导得到
3.3 p坐标系
p坐标系基于天气尺度的大气运动具有准静力平衡的特点,将静力平衡方程引入坐标系

3.4 σ \sigma σ坐标系(重点掌握)
sigma坐标系的下边界条件简单,是当前数值天气预报模式应用最广泛的坐标系
sigma坐标系的定义

- p T 和 p S p_T和p_S pT和pS分别表示大气顶和地面的气压,易知p取大气顶的时候sigma=0,p取地表气压的时候sigma为1——这样就大大简化了下边界
- sigma就是一个关于(x,y,t,p)的函数,p的信息也包含在里面了,因此对于物理量 F ( x , y , p , t ) = F [ x , y , σ ( x , y , p , t ) , t ] F(x,y,p,t)=F[x,y,\sigma(x,y,p,t),t] F(x,y,p,t)=F[x,y,σ(x,y,p,t),t]
sigma坐标系与p坐标系的转换
核心公式:
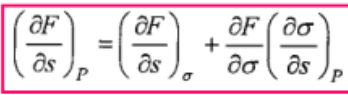
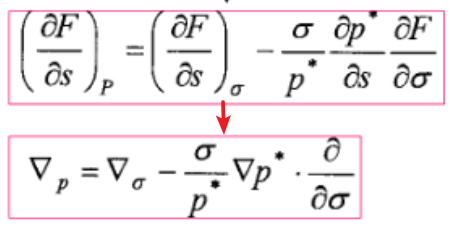
sigma坐标系下梯度和气压梯度力的推导
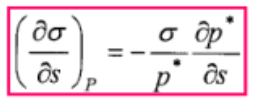
带入后得到
(四)地图投影坐标系
地图投影:按照一定的数学条件,把地球表面展绘于平面图上,就是将地球表面投影到一个平面上
-
地图投影坐标系仅涉及水平坐标变换
-
对于全球大气:使用球坐标系
-
对于有限区域大气:使用局地直角坐标系和地图投影坐标系
4.1 投影误差
- 距离误差:投影面上长度放大或缩小的倍数随地点或方向而改变
- 面积误差:投影面上面积的放大或缩小的倍数随地点或方向而改变
- 角度误差:投影面上微小区域任意两条交线的夹角不等于地球上相应两条交线的夹角,导致投影面上某区域的形状于地球上相应区域形状不相似
4.2 投影分类
按地图投影误差性质分:
- 正形投影
- 等面积投影
- 任意投影
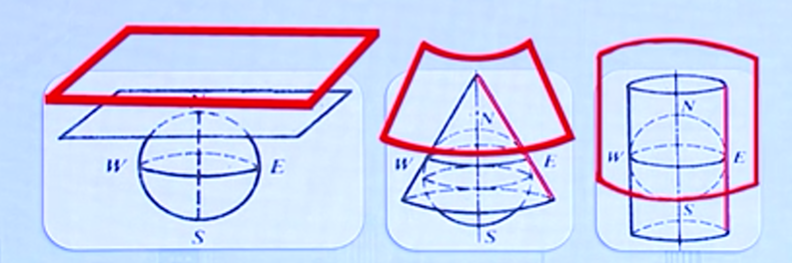
按地面投影面形状可分为:
- 方位投影或平面投影(兰勃托投影)
- 圆锥投影(极射赤面投影)
- 圆柱投影(麦卡托投影)
4.3 几个重要的基本概念
-
映像面:投影的投射面

-
映像平面:映像面沿某一条经线切开所展成的平面
-
地图:映像平面按地图比例尺缩小后的图
-
切投影:映像面与地球表面相切的投影
-
割投影:映像面与地球表面相割的投影
-
标准纬度:映像面与地球表面相交的纬度
-
映像比例尺(地图放大系数):m=映像面上的距离/地球表面的相应距离,在标准维度上m=1,正形投影的影响比例尺随纬度变化,不随经度变化
-
缩小比例尺:地图上任意纬度上的距离/映像平面上相应的距离
-
实际比例尺:地图上任意纬度的距离/地球表面上相应的距离
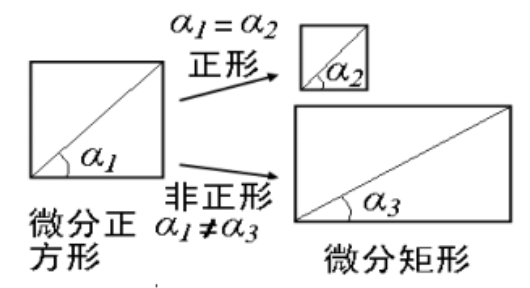
4.4 正形投影(保角投影)
投影后微小区域任意两条交线的夹角保持不变,且任意一点在各方向上长度放大或缩小的倍数相等,投影后不产生形状误差
注意:正形投影保证的是微小区域不发生形变,但不能保证大的地理区域不变形
正形投影的径向放大系数=纬向放大系数
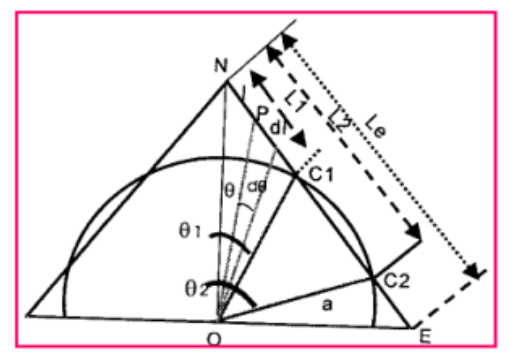
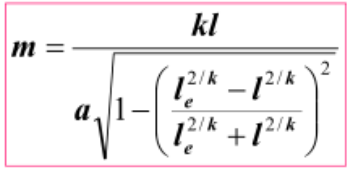
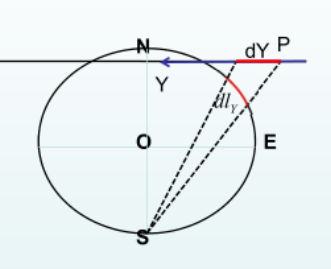
4.5 圆锥投影放大系数
- 圆锥投影的光源位于球心,与地球的交线的纬度是标准纬度,之后从球心出发,将地球上每一点投影到圆锥面上
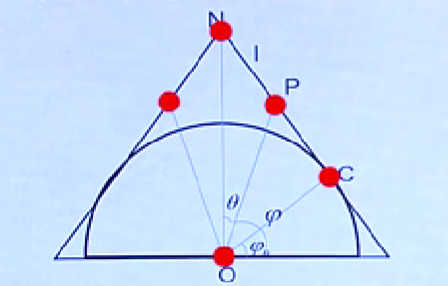
- 假设取纬度phi的纬圈,画出其投影之后的纬圈在映像平面上的样子

- 想求地图放大系数,就是求映像平面上的纬圈长度/地球实际纬圈的长度
- 其中映像平面的纬圈长度为 L = 2 π k l L=2\pi kl L=2πkl,其中k就是这个扇形的张角,l为该圈到中心点的距离,实际纬圈长度为 L s = 2 π a c o s ϕ L_s=2\pi a cos\phi Ls=2πacosϕ
- 两者相除得到 m = L L s = k l a c o s ϕ = k l a s i n θ m=\frac{L}{L_s}=\frac{kl}{a cos\phi}=\frac{kl}{a sin\theta} m=LsL=acosϕkl=asinθkl,其中k,l为需要求的
圆锥常数k求法
- 由于在标准纬度处,m=1,同时对于确定的投影方式,其标准纬度,以及到极点的距离是确定的,就可以反解出k
距离l求法
思路:
- 根据正形投影的纬向和径向的放大系数相等
- 列出径向放大系数的表达式,让其与纬向放大系数相等
- 之后对等式两侧积分,得到l的表达式
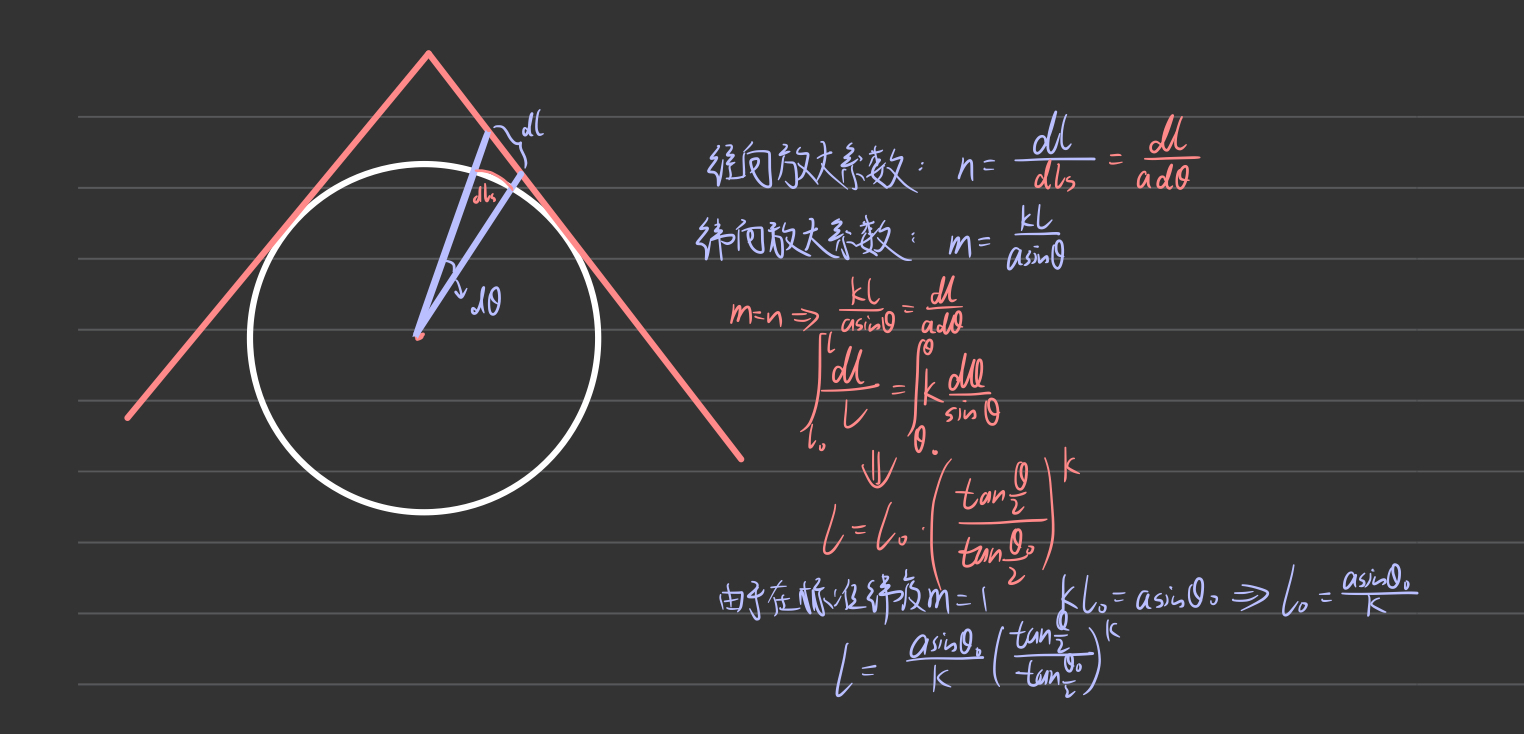
连立后
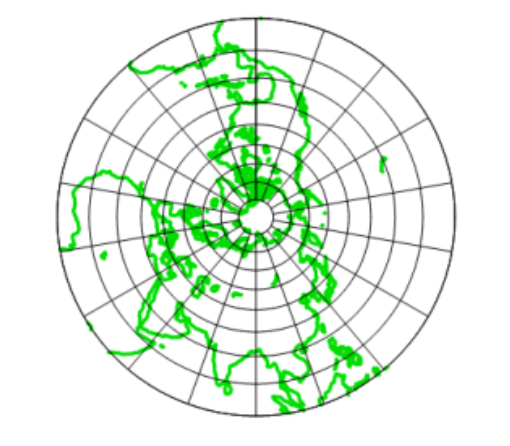
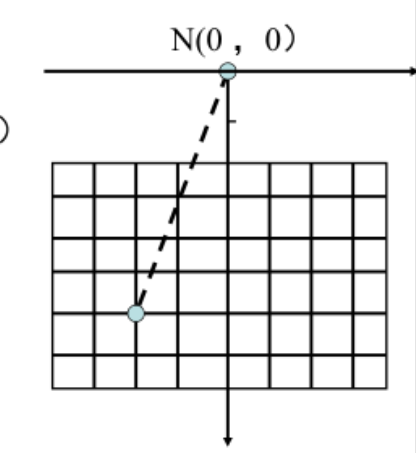
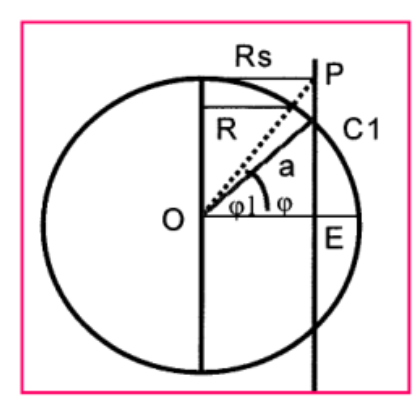
4.6 极射赤面投影
是一种正形割投影,光源位于南极,映像面与地球相割于60度,标准维度为60度,k为1

投影效果
l的计算:d为网格距,I,J为相对于北极点的坐标

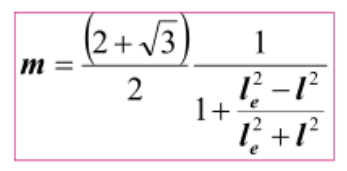
地图放大系数:
4.7 兰勃托投影
兰勃托投影也是正形投影,光源位于地球球心,映像面于地球交于30和60度
投影效果:

地图放大系数
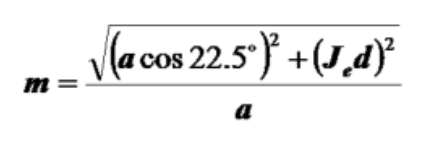
4.8 麦卡托投影
也是正形投影,光源位于球心,映像面是与地球表面相割于南北纬22.5度的圆柱面,标准维度为南北纬的22.5度
投影效果:
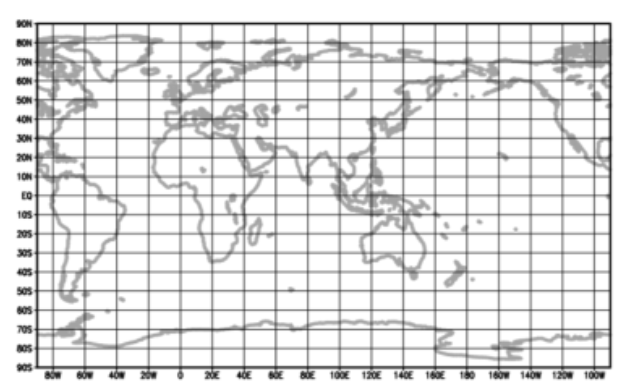
地图放大系数
4.9 三种地图投影的特点
- 极射赤面投影:在极地和高纬度的投影较小,常用于制作极地天气图和北半球天气底图
- 兰勃托投影:中纬度的变形较小,适合中纬度天气底图
- 麦卡托投影:在低纬和热带地区的变形较小
(五)正交曲线坐标系
- 地图投影坐标系实际上是球面上正交曲线坐标系
- 三个坐标轴至少有一个是曲线,三者之间两两垂直
- 单位矢量随空间点的变化而变化
- 坐标变元:坐标变量的微元 d q j dq_j dqj
- 坐标线元:沿坐标线移动坐标变元对应的实际距离 d l j dl_j dlj
- 拉密系数:沿坐标线移动单位量对应的实际距离 H j H_j Hj
- 坐标线元不等于坐标变元,等于拉密系数与其的乘积 d l j = H j d q j dl_j=H_jdq_j dlj=Hjdqj
5.1 球坐标系下
- 坐标变元: d λ , d ϕ , d r d\lambda, d\phi, dr dλ,dϕ,dr
- 坐标线元: d l λ , d l ϕ , d l r dl_{\lambda}, dl_{\phi}, dl_r dlλ,dlϕ,dlr
- 拉密系数: H λ , H ϕ , H r H_{\lambda}, H_{\phi}, H_r Hλ,Hϕ,Hr
- d l λ = r c o s θ d λ dl_{\lambda}=rcos\theta d\lambda dlλ=rcosθdλ因此 H λ = r c o s θ H_{\lambda} = rcos\theta Hλ=rcosθ
5.2 地图投影z坐标系下
- 坐标变元: d X , d Y , d Z dX, dY, dZ dX,dY,dZ
- 坐标线元: d l X , d l Y , d l Z dl_X, dl_Y, dl_Z dlX,dlY,dlZ
- 映像面上的dY和实际的
d
l
y
dl_y
dly之比就为地图放大系数,因此Y方向拉密系数为
H
Y
=
1
n
,
H
X
=
1
m
,
H
Z
=
1
H_Y=\frac{1}{n},H_X=\frac{1}{m}, H_Z=1
HY=n1,HX=m1,HZ=1
5.3 正交曲线坐标系下的几种表示
气压梯度

涡度表示

散度表示

5.4 正交曲线坐标系的大气运动方程组
(六)空间差分格式
6.1 空间差分格式
- 通过泰勒展开式,经过加加减减之后可以得到前差,后差,中央差格式
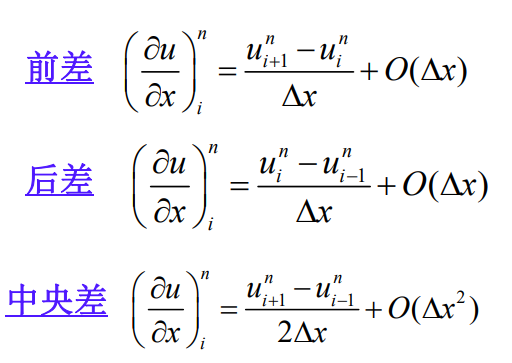
- 前差和后差都是一阶精度,中央差是二阶精度
- 相同的时间也可以有前后中央差
6.2 显示和隐式
- 将空间前后中央差和时间前后中央差通过排列组合之后可以出现多种差分格式
- 显示格式就是方程中只有一项是n+1时刻的,就是需要预报时刻的值
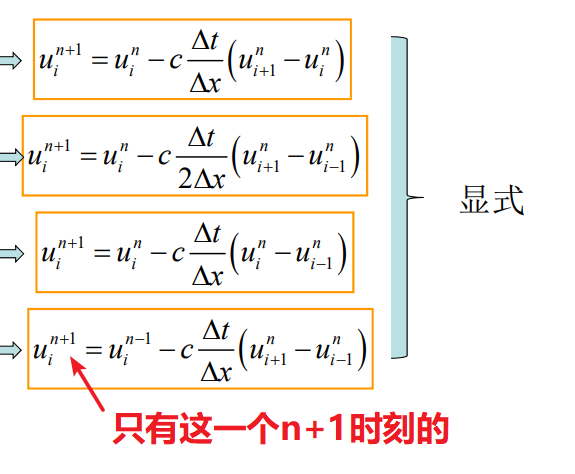
- 隐式则是有不止一项有n+1时刻的值

6.3 二阶偏导的表达式
(七)差分方程基本性质
有这么多种差分格式,但不一定每一个都好用,需要检验这几个性质,选择最合适的差分格式
7.1 相容性(一致性)
差分方程是否逼近原始方程
泰勒级数构造的差分方程一定满足相容性,也就是之前那种构造方式相容性就自动满足了
7.2 误差的讨论
- 微分方程有一个真解,记为u
- 最终我们使用差分方程求出来的解其实是差分方程的近似解,由于计算机有有效位数的限制,因此最终求出的解也不是差分方程的真解,这个差分方程的近似解记为 U ˉ \bar U Uˉ
- 差分方程的真解记为U
- 因此最终的误差就是u- U ˉ = ( u − U ) + ( U − U ˉ ) \bar U=(u-U)+(U-\bar U) Uˉ=(u−U)+(U−Uˉ),即微分方程的真解 - 差分方程的近似解 = (截断误差)+(舍去误差)
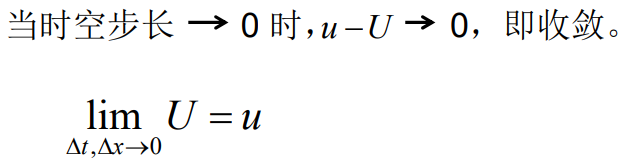
7.3 收敛性
当时空步长趋于0的时候,截断误差(真解和差分方程精确解之差)为零
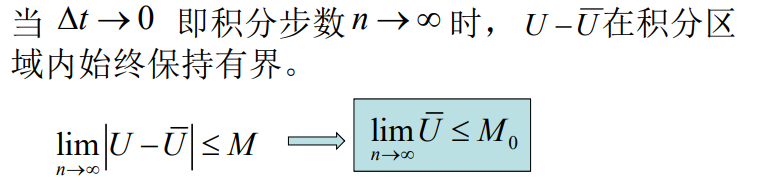
7.4 稳定性
就是时间步长趋于0的时候,差分近似解不能趋于0
7.5 拉克斯等价定律
当相容性条件满足的时候,稳定性可以保证收敛性
因此泰勒展开的差分格式,只需要证明稳定性就可以保证收敛性
(八)线性稳定性的证明方法
- 根据拉克斯定律,最终的证明目标就是数值解不会无穷增大,可以让振幅后项比前项绝对值小于1,那就不会无限增长,也就是证明增幅因子绝对值小于1
8.1 证明步骤
-
设微分方程的解,可以设为波动解的形式
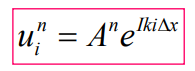
-
选定差分格式,之后将波动解带入方程中,出现 A n + 1 和 A n A^{n+1}和A^n An+1和An,这个就是前后时刻的振幅了,等式两边同除 A n A^n An,可以得到增幅因子G

- 根据得到的G的表达式进行分析,如果G绝对值一定大于1,则差分格式绝对不稳定,如果满足一定条件才绝对值小于等于1,则是条件稳定,若G绝对值一定小于1就是绝对稳定
注意:算出的G之后一般有虚部和实部,计算G的模的平方的时候是将虚部和实部分别平方再相加
(九)非线性稳定性
在满足先行稳定性的条件下,由于非线性作用(比如初边条件不够恰当,或非线性项的处理不够恰当等)引起的不稳定称为非线性不稳定
9.1 混淆误差
有限网格系统能识别的最短波长为 2 Δ x 2\Delta x 2Δx,如果由于非线性作用产生波长小于 2 Δ x 2\Delta x 2Δx的波会被**错误识别为大于 2 Δ x 2\Delta x 2Δx**的波,从而造成的误差叫做混淆误差
判断方法:
- 首先看研究的区域有多少倍格距,记为I
- 看所研究的波在这个区域内波数为多少,由于实际波可能是多个波叠加之后的结果,因此将这个波数记为 k 1 + k 2 k1+k2 k1+k2,其中k1,k2都是波数比 I 2 小的波 \frac{I}{2}小的波 2I小的波
- 判断,如果 k 1 + k 2 > I 2 k1+k2 >\frac{I}{2} k1+k2>2I,则发生了混淆误差
- 会将波为k1+k2的波混淆为波数为 I − ( k 1 + k 2 ) I-(k1+k2) I−(k1+k2)的波
比如研究长为12倍格局的区域,研究的波数k1+k2=8>6,因此发生混淆误差后误判为波数为12-8=4的波
- 特殊的,如果误判后的波与原来k1或k2波相等,就等于会让原本那个波能量虚假增长,导致非线性不稳定
- 会发生非线性不稳定的波的波长位于 2 Δ x 和 4 Δ x 之间 2\Delta x和4\Delta x之间 2Δx和4Δx之间,因此非线性不稳定造成的能量虚假增长一般是短波引起的
9.2 克服非线性不稳定的方法
- 进行时空平滑,滤去短波分量
- 构造守恒的差分格式,让差分方程能尽可能保持原来的物理规律和能量关系
(十)空间平滑和滤波
通过空间平滑滤波可以有效抑制非线性不稳定,让积分可以持续进行
10.1 三点平滑公式
- F为任意物理量,S为平滑系数
- 本质上就是将空间上的三个点加权之后作为该点值
10.2 滑动性能分析
步骤:
- 设物理量的简谐波解
-
带入原式(重点是用到三角函数的积化和差公式)
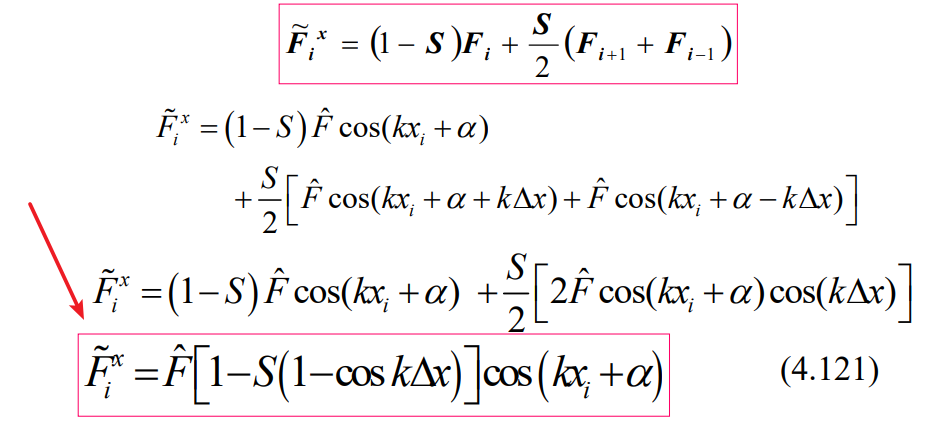
-
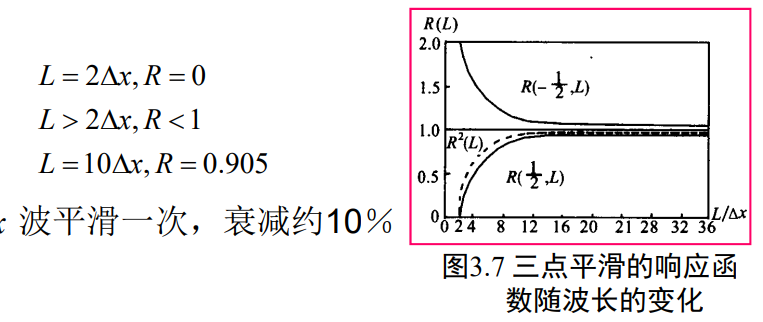
比较平滑后的振幅和原振幅,两者相除称为相应函数R,R与平滑因子S和波长都有关
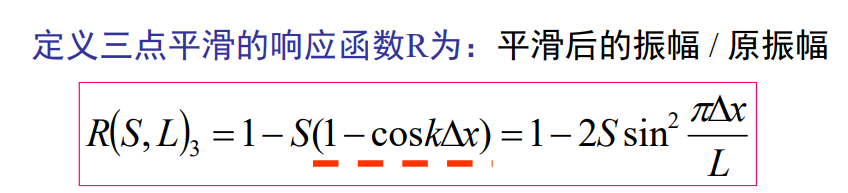
-
根据R的表达式分析,什么时候>1,<1,=0,对应滑动后使振幅增强,削弱,完全削除
-
根据R的情况就可以看出滤波效果,理想的就是将一些短波削弱或滤去
-
比如取S=1/2,就可以算出R对于波长为 2 Δ x 的波可以完全滤除 2\Delta x的波可以完全滤除 2Δx的波可以完全滤除
-
但是可见,虽然对长波的削弱作用不是很大,但是经过多次平滑之后,削弱程度是指数上升的,因此仅仅用这种平滑方式对长波也会有很大削弱
10.3 正逆平滑
- 刚才使用S=1/2会使所有波有不同程度的削弱
- 如果取S=-1/2,计算发现会使所有波有不同程度的增强
- 正逆平滑就是每次进行正逆两次平滑,以抵消对长波的削弱,同时也能削弱短波
10.4 五点平滑
-
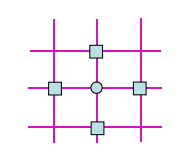
三点平滑是在一维上的平滑,五点平滑就是x,y两个方向的二点平滑
-
就是对x,y方向分别做三点平滑之后取平均

-
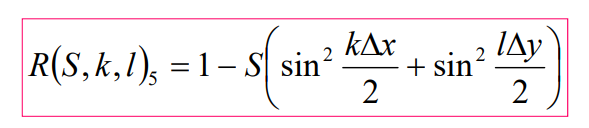
响应函数R如下
10.5 九点平滑
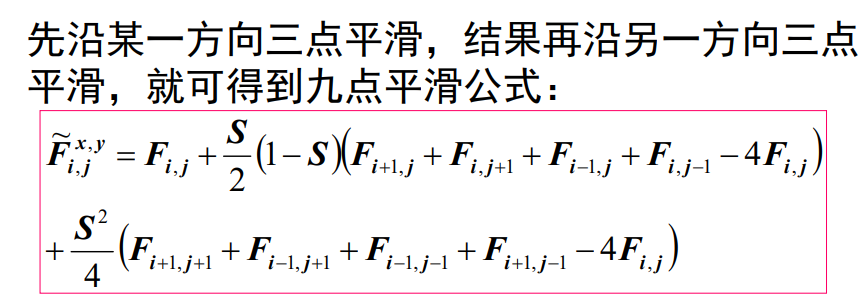
响应函数R为:

(十一)误差分析
11.1 计算解误差
使用三个时间层积分造成的误差,解出的解是物理解和计算解混合在一起的结果,其中计算解是没有物理意义的误差
比如有个方程算出的G值为
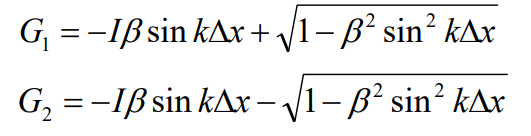
- 其中一个G是有实际意义的,另一个G是没有意义的,因此就会产生计算解和物理解
- 但是求出的结果两者是混在一起无法分辨的,计算解就是没有物理意义的误差
误差特点
- 长波误差小,短波误差大
- 网格分辨率越高,计算解越小
- 计算解存在周期为 2 Δ t 的高频振荡 2\Delta t的高频振荡 2Δt的高频振荡
减少误差方案
- 采用高分辨率网格
- 通过平滑滤波的方式滤去短波
11.2 频率误差
用时间差代替时间微商会引起频率误差
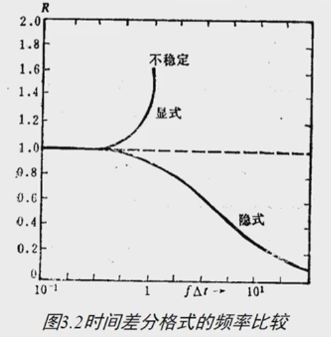
误差特点
- 显式格式会产生高频解,隐式格式会产生低频解
- 时间步长取得很小的时候,两者的数值解频率个实际频率都很接近
减小误差方案
- 减少时间步长
- 采用显式隐式相结合的方法进行
11.3 相速度和群速度误差
空间差分格式造成了相速度和群速度误差,从而引起计算频散
误差特点
- 波长越长误差越小
减小误差方案
- 提高网格分辨率,使空间步长足够小,可以减少该误差
11.4 小结
| 形成原因 | 解决方法 | |
|---|---|---|
| 计算解误差 | 三重积分格式 | 提高网格分辨率+平滑滤波 |
| 频率误差 | 时间差分代替微分 | 提高时间分辨率 + 显隐结合 |
| 相速度和群速度误差 | 空间微分 | 提高网格分辨率 |
(十二)常用的时间积分格式
12.1 前差(显示格式)
- 将时间差分以外的所有量先写为F
- 前差和空间的前差是一致的
特点
- 绝对不稳定
- 精度低
- 计算简单
- 无计算解干扰
12.2 中央差格式(显示格式)
- 和空间中的中央差也是一致的
特点
- 条件稳定,稳定性判据为 ∣ β ∣ < = 1 |\beta|<=1 ∣β∣<=1
- 计算简单
- 二阶精度
- 有计算解干扰
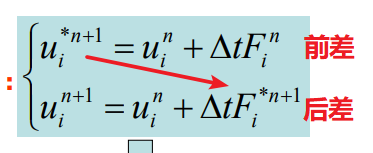
12.3 欧拉后差(显示格式)
- 先用显示的前差算出 初步预报量 u i ∗ n + 1 初步预报量u_i^{*n+1} 初步预报量ui∗n+1
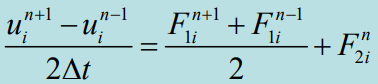
- 之后将 u i ∗ n + 1 u_i^{*n+1} ui∗n+1带入下式中的隐式后差中,就是 F ∗ n + 1 F^{*n+1} F∗n+1中会用到 u i ∗ n + 1 u_i^{*n+1} ui∗n+1,带入后求得最终的 u n + 1 u^{n+1} un+1
- 就是用前差算出的值带入后差中作订正
特点
- 计算简单
- 精度低
- 无计算解干扰
- 条件稳定 ∣ β ∣ < = 1 |\beta| <=1 ∣β∣<=1
- 可以抑制非线性不稳定,因为是显隐结合的形式
12.4 后差(隐式格式)
特点
- 计算复杂,每一步耗时多,但是时间不长可以长,所以不一定比显式耗时
- 精度低
- 无计算解干扰
- 绝对稳定
12.5 梯形格式(隐式格式)
特点
- 计算复杂
- 精度高
- 无计算解干扰
- 绝对稳定,中性稳定
12.6 半隐式格式(隐式格式)
- 对于短波取隐式,对于长波取显示
特点
- 数值计算简单
- 步长可以相对取长一些
- 精度高
- 稳定性好
- 有计算解干扰
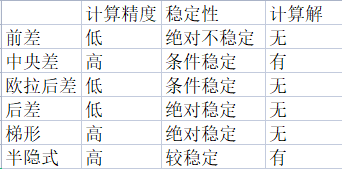
12.7 小结
(十三)正压原始方程组模式
13.1 正压模式的物理假设
- 大气为均匀不可压流体——密度为常数
- 大气处于静力平衡——加上密度为常数,可以推得水平气压梯度力不随高度变化
- 初始时刻,水平风切变为零——水平气压梯度力不变,水平方向受力不变,垂直方向静力平衡,且初始为0,说明之后任意时刻的水平风随高度都不会变化
- 大气上界为自由面
- 不考虑摩擦及非绝热作用
13.2 正压模式的预报方程组
-
将静力平衡方程与连续方程连立后,得到三个方程
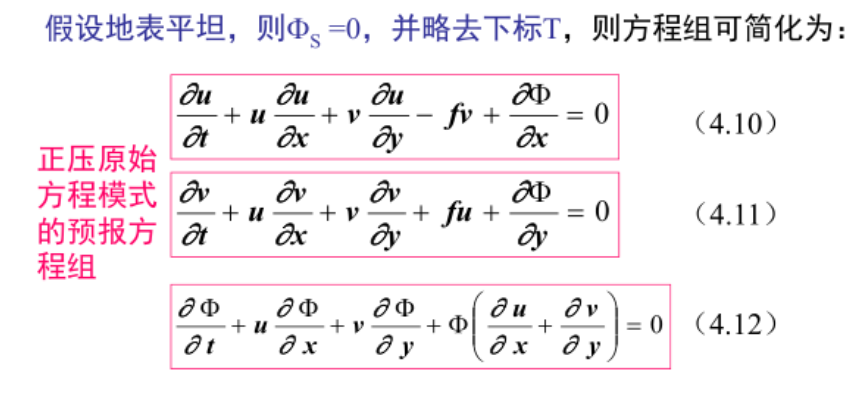
-
其中的未知数为u,v, ϕ \phi ϕ,可以做未来风场和位势高度场的预报
-
通常正压原始方程模式用于500hPa的高度场预报
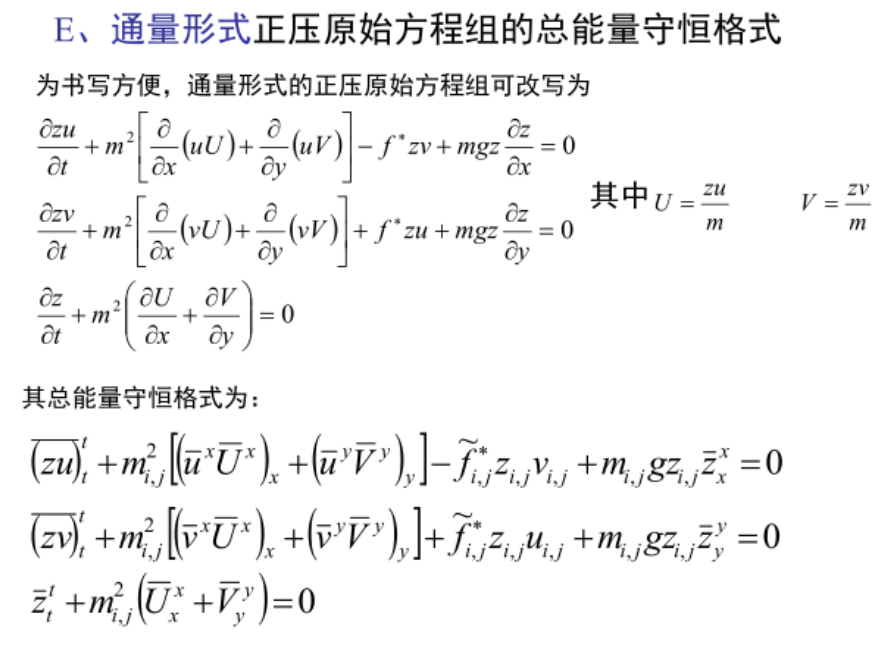
13.3 方程组的积分性质
- 全球总质量守恒
- 总能量守恒
- 总绝对涡度守恒
- 总涡度守恒
- 总绝对角动量守恒
证明思想:将散度写成通量散度之后对封闭区域积分为0
13.4 正压原始方程组的稳定性计算
- 对于变量需要线性化,平均量随时间不变化
- 对时间空间都用中央差的话,在满足 ( α + β ) 2 ≤ 1 (\alpha+\beta)^2 \le 1 (α+β)2≤1的条件下是稳定的
- 在二维运动时候,线性稳定性判据为 Δ ≤ d 2 ( c + ∣ u ˉ ∣ m a x ) \Delta \le \frac{d}{\sqrt{2}(c+|\bar u|_{max})} Δ≤2(c+∣uˉ∣max)d,d为水平分辨率,c为重力惯性波速度取300m/s
- 原始方程组中含有快波解,容易产生非线性不稳定,主要通过空间平滑+设计守恒的空间差分格式
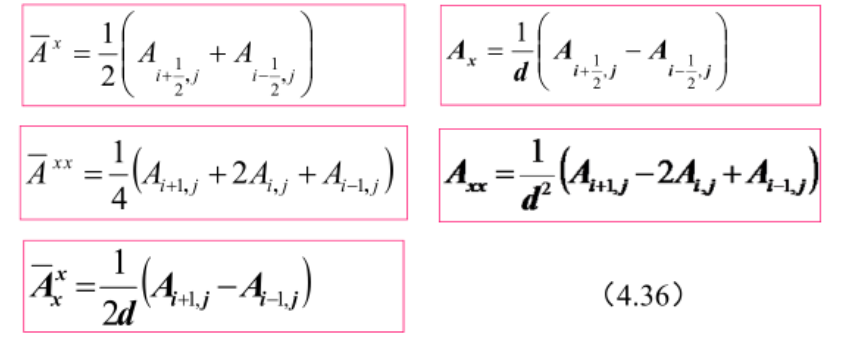
(十四)差分算符
- 分别表示取平均和差分运算
(十五)守恒的空间差分模式
有限差分方程应该保持对微分方程的物理特性,才能保证数值解沿正确的途径逼近微分方程的解
15.1 一次守恒格式
就是对一个式子在一定区域S上进行积分,其总值不随时间变化

- 上式对于差分方程而言,就是将差分格式在S区域上求和,看能否满足求和结果为0
- 差分格式取中央差,即
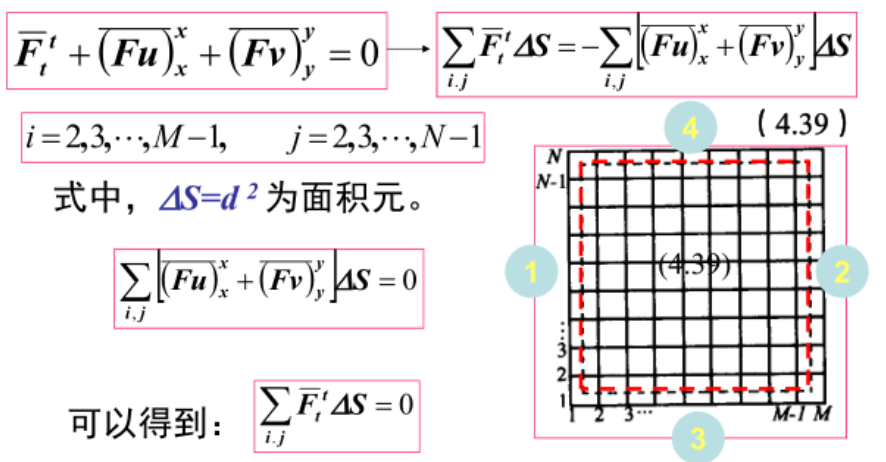
- 证得这种差分格式与原方程组有相同的积分性质,因此是一次差分守恒格式
通量形式的一次守恒
- 原微分方程:

- 取中央差后就是一次守恒格式
平流形式的一次守恒
- 原微分方程:

- 同样取中央差

缺点
- 由于总量守恒也就是平均值守恒,并不能保证稳定性,因为9999-9999=0,可能还是存在非线性不稳定,因此如果能满足F^2守恒就更好了
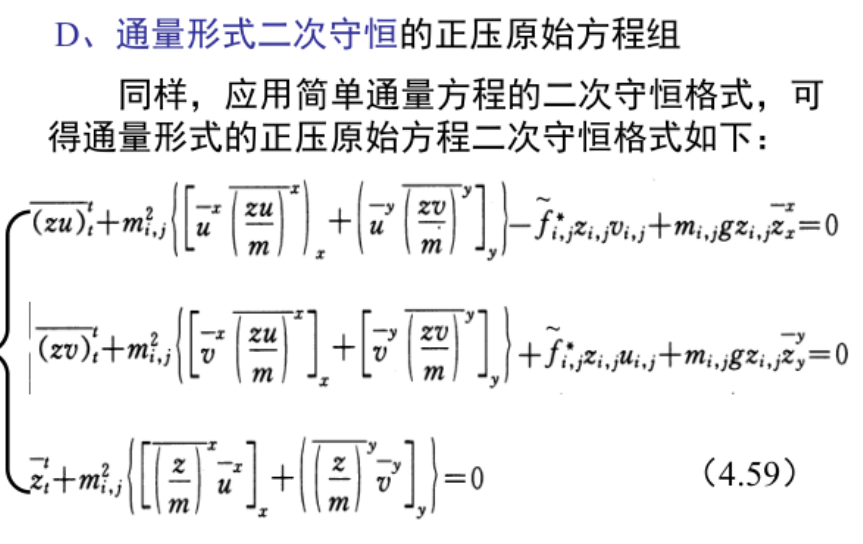
15.2 二次守恒差分方程
通量格式
- 原微分方程:乘以一个F之后就出现F^2,之后再对S区域进行积分

由于对通量散度进行闭合区域积分为0,得到
- 对应的二次守恒的通量差分方程

平流形式

也可以写成半动量格式
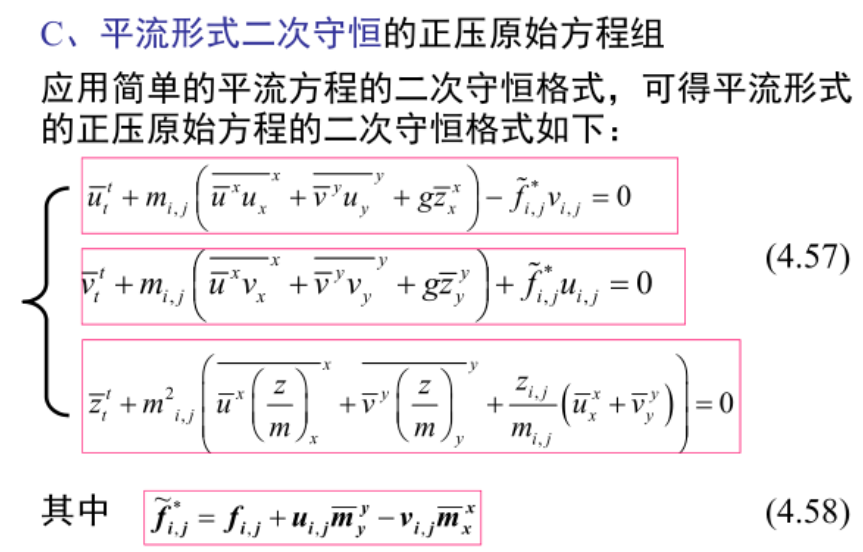
(十六)将方程组写到地图投影坐标系下
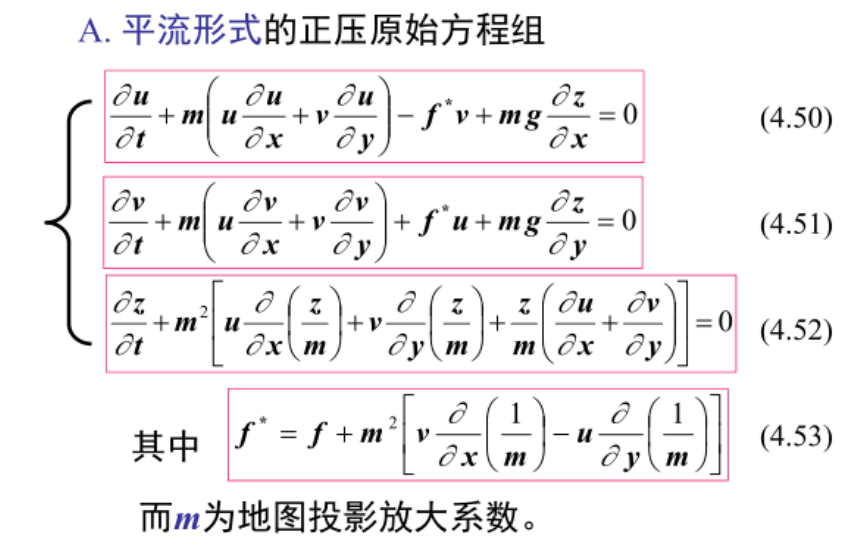
16.1 两种形式的微分方程组
若考虑兰伯特投影,是正形投影,m=n,就有
以及通量形式
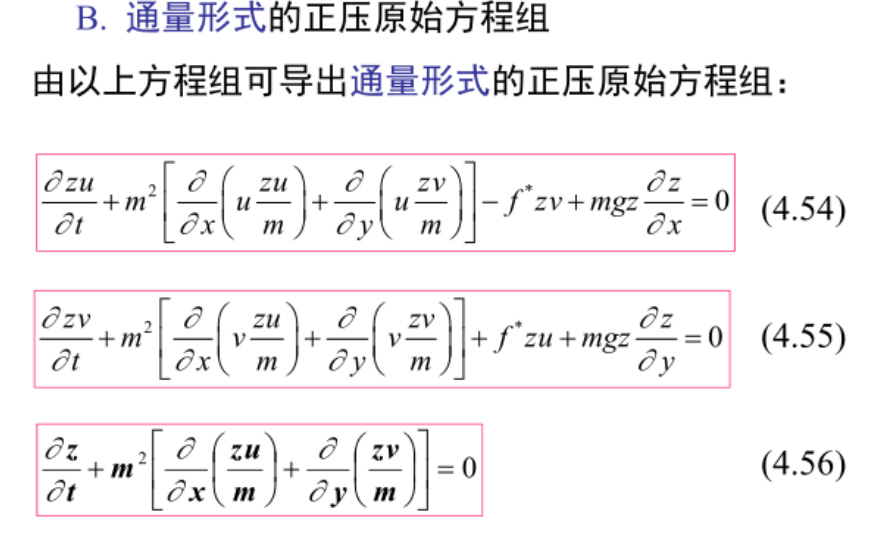
16.2 两种形式的二次守恒差分方程组
(十七)三步法时间积分格式
- 欧拉后差+中央差格式
- 先用欧拉后差格式向前积分6步(一小时),之后换成中央差(三步法)起步的中央差格式11小时
- 三步法:时间积分起步,先用前差格式报半步,再用中央差格式报报半步,之后用正常的中央差格式报下去
- 一开始之所以用欧拉后差,是因为:先阻尼高频震荡且稳定性好,让积分稳定下来
- 之后用中央差因为:精度高且节省机时
- 三步法起步因为:计算解的振幅与时间不长成正比,三步法的时候半步长先积分,这样起步时的计算解就会小,减小计算解对最终结果的影响
- 之后用时间平滑来抑制后来越来越大的计算解,S取0.5
- 优点:编程实现容易
- 缺点:由于都是条件稳定的,时间步长不能取太短,积分步数仍会较多
(十八)斜压原始方程模式
实际大气是斜压大气,需要考虑多层模式——斜压原始方程模式
18.1 仿地形高度sigma坐标系
- 任意位置的气压分解为参考气压+扰动气压,参考气压是满足静力平衡的,用满足静力平衡的参考气压建立sigma坐标
p ( x , y , z , t ) = p 0 ( z ) + p ′ ( x , y , z , t ) , p 0 ( z ) 是 z 高度上的参考气压, p ′ 是七偏差量 p(x,y,z,t)=p_0(z)+p'(x,y,z,t),p_0(z)是z高度上的参考气压,p'是七偏差量 p(x,y,z,t)=p0(z)+p′(x,y,z,t),p0(z)是z高度上的参考气压,p′是七偏差量 - 地面气压取的是相应地形高度上的参考气压,因此只取决于地形高度
- 大气层顶的气压取得是常数,没有扰动气压,上下边界条件依旧简单
- 因此需要增加扰动气压的预报方程,之后叠加上参考气压,间接研究了非静力问题
18.2 斜压原始方程的积分性质
- 质量守恒
- 动量守恒
- 动能守恒
- 总能量守恒
18.3 垂直积分格式
由于所有垂直层厚度之和需要为1
- KaTeX parse error: Undefined control sequence: \simga at position 47: …a_k = 1,\Delta \̲s̲i̲m̲g̲a̲_k = \simga_{k+…,这样k只取1,3,5,7奇数
- 奇数面是中间面,偶数面是交界面
- 面用k表示,层用i表示
- 垂直速度一定要放在交界面上,其余变量放在中间面上
(十九)物理过程参数化
用大尺度变量有关地表达式来描述次网格物理过程对大气运动的统计效应
次网格过程参数化:用大尺度变量有关的经验公式来表示次网格过程对大气运动的统计效应
19.1 次网格物理过程
由于大气是连续运动的连续介质,不管模式分辨率如何高,总有一些接近或小于网格距尺度的运动或过程,无法在模式中确切地反映出来,这种运动过程称为次网格过程
主要由辐射过程,边界层过程,湿热力过程
地表平衡方程可以将三者联系起来:地面净辐射 = 向上输送感热 + 潜热输送 + 土壤热通量
19.2 辐射过程
- 地面吸收的净辐射 = 太阳短波辐射 - 地面向上的长波 + 大气向下的长波辐射
19.3 边界层过程
湍流对热量,动量,水汽的输送
19.4 湿热力过程
水汽凝结蒸发过程
19.5 参数化存在的问题
- 只考虑了小尺度运动对大尺度运动的影响,没有考虑大尺度运动对小尺度的影响
- 经验数值缺乏客观的确认方法
- 模式对参数化的差异敏感
(二十)模式的初始条件和边界条件
预报的不确定性会来自:模式误差,初值误差,大气本身的混沌特性(蝴蝶效应,非线性)
- 欧洲中心做得好,特别是资料同化做得好,特别是短期预报,初值影响特别明显
- 集合预报:有多个预报成员,对预报结果进行加权处理
20.1 资料初始化
观测值不能直接带进方程,容易导致高频振荡,产生计算不稳定,同时初值和数值模式之间有不平衡,因为模式大气是经过简化的
20.2 静力初始化
假设风压场之间满足某种平衡关系式(地转风和)
- 中高纬地区,高度场直接用,风场通过地转风公式得到
- 低纬度地区,风场直接用,用平衡风公式得到高度场
- 前两者是假设大气水平无辐散的,还有辐合辐散的初始风场,通过运动方程求得的诊断方程得到,比如 ω \omega ω方程算出的垂直速度代入连续方程,求出速度势函数,对其求梯度就是辐散风
20.3 动力初始化
借助原始方程组的一些动力特性,滤去重力惯性波,得到接近平衡的初值
- 地转适应过程就是重力惯性波能量的频散过程
20.4 变分初始化
通过变分原理,使初始资料在一定动力约束下调整
(二十一)资料同化
将常规和非常规资料有机融合在一起,得到一个更符合实际大气状况的分析场,常用于为模式提供初值和来更新预报值
- 可以将气象站的常规观测和非气象站的非常规资料
- 用预报场作为背景场,结合观测值,之后带到同化系统中,得到分析场,进行模式预报
- 四维资料同化:包括初始资料的同化和预报过程的同化:就是在进行数值预报过程中,还能不断接收到气象场资料,可以用其修正预报结果,以获得更好的连续天气分析及预报结果
- 同化窗口:在一段时间中,不断用气象场资料修正预报结果,等于在给预报进行预热,减小前期预报的误差
同化和初始化的差别:待
(二十二)边界条件问题
需要给定:水平侧边界,垂直边界条件
- 常用的水平侧边界包括:
- 固定边界条件(边界的速度为0且不随时间变化)
- 法向速度为零的边界条件(系统进不去也出不来,只能做短期预报)
- 海绵边界条件:给几圈过渡带(缓冲区),过渡带上的值用内部模式算的值和边界的值的加权差值,也是为了让梯度小一些
- 外推边界条件:通过外推给出边界值,可以让外界的天气系统进来,但是还是偏主观
- 周期边界条件:认为东西/南北对称点的值相等,这样进来多少就会出去多少
- 嵌套边界条件:大模式的预报结果为小模式提供边界条件,即粗网格的预报结果为细网格提供边界条件;将关注区域的网格分辨率提高,就会出现粗细网格;单向嵌套:只有粗网格为细网格提供边界条件;双向嵌套:将细网格中报的值反馈给粗网格,粗细网格需要同步进行,需要考虑时间步长的区别
(二十三)谱模式
是一种离散化方程的方法(水平方向)
- 将水平方向的变量表示成有限个基函数的线性组合
- 比如用傅里叶级数,将变量表示为很多波的叠加,也就是基函数的线性组合;计算机做不到无穷,只能表示为有限波的叠加
- 谱模式在大气中一般做半球预报或全球预报,用球坐标系
- 使用球谐函数作为基函数,球谐函数 ϕ n m \phi_n^m ϕnm,m表示纬向波数,n表示全波数,n-m表示经向方向球谐函数为0的个数(南北极除外),当取不同的m,n就可以像傅里叶级数一样表示任意的波
- 代入方程之后每个方程都有球谐函数,约去之后只含有谱系数的方程,变成常微分方程,再对时间层进行差分求解
- 因为计算机不能算无穷的,只能取有限的球谐函数,会有截断,有三角形截断和菱形截断
- 谱模式的分辨率用:保留的纬向最大波数作为分辨率(截断波数M),且可以转化为网格点的分辨率,纬向格点数>=3M+1 ,经向方向格点数>=(3M+1)/2
- 相同分辨率的情况下谱模式计算精度高,稳定性好,程序模式简单,不存在混淆误差
- 谱模式分辨率不断提高,计算工作量也巨增