前言:
基于改进的 Denavit-Hartenberg 参数的UR机械臂正向运动学求解和基于几何分析的逆运动学求解。该代码在 C++ 和 MATLAB 中可用,两者都与 CoppeliaSim 集成。
该解决方案是使用 Microsoft Visual Studio 2022 和 C++ 20 标准构建的。
依赖:
Eigen
Eigen 是线性代数的 C++ 模板库:矩阵、向量、数值求解器和相关算法。
CoppeliaSim
使用他们的 C++ 远程 API:
在您的项目目录中包含以下文件:extApi.h、extApi.c、extApiPlatform.h 和 extApiPlatform.c;它们位于 CoppeliaSim 的安装目录中,在 programming/remoteApi 下;
将 NON_MATLAB_PARSING 和 MAX_EXT_API_CONNECTIONS=255(以及可选的 DO_NOT_USE_SHARED_MEMORY)定义为预处理器定义;
包括附加目录 remoteApi 和 include;
如果您对使用其调用的安全版本(如 fopen_s)不感兴趣,则需要在包含的头文件之前放置 _CRT_SECURE_NO_DEPRECATE 的定义。
思维导图:
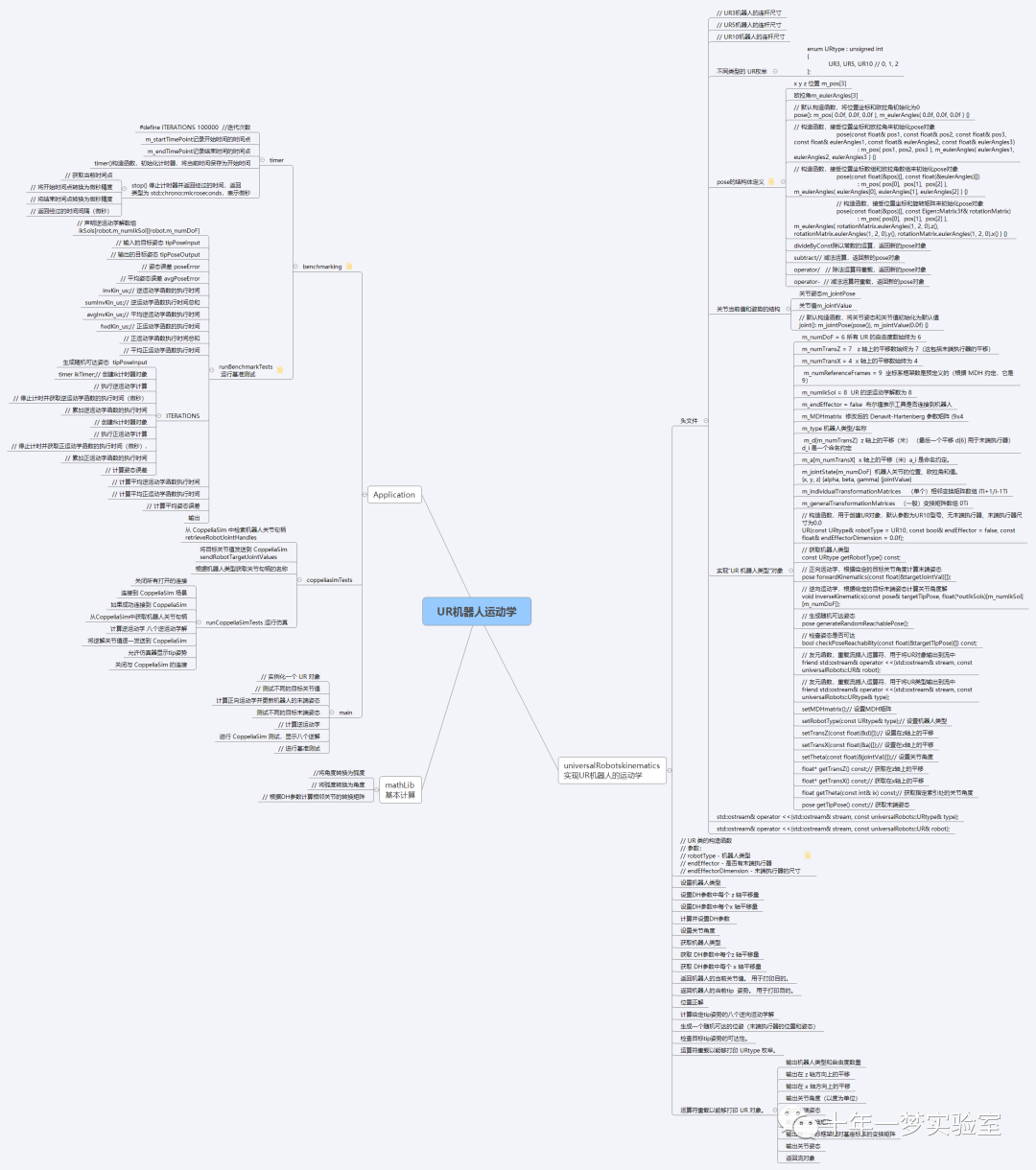
C++程序框架
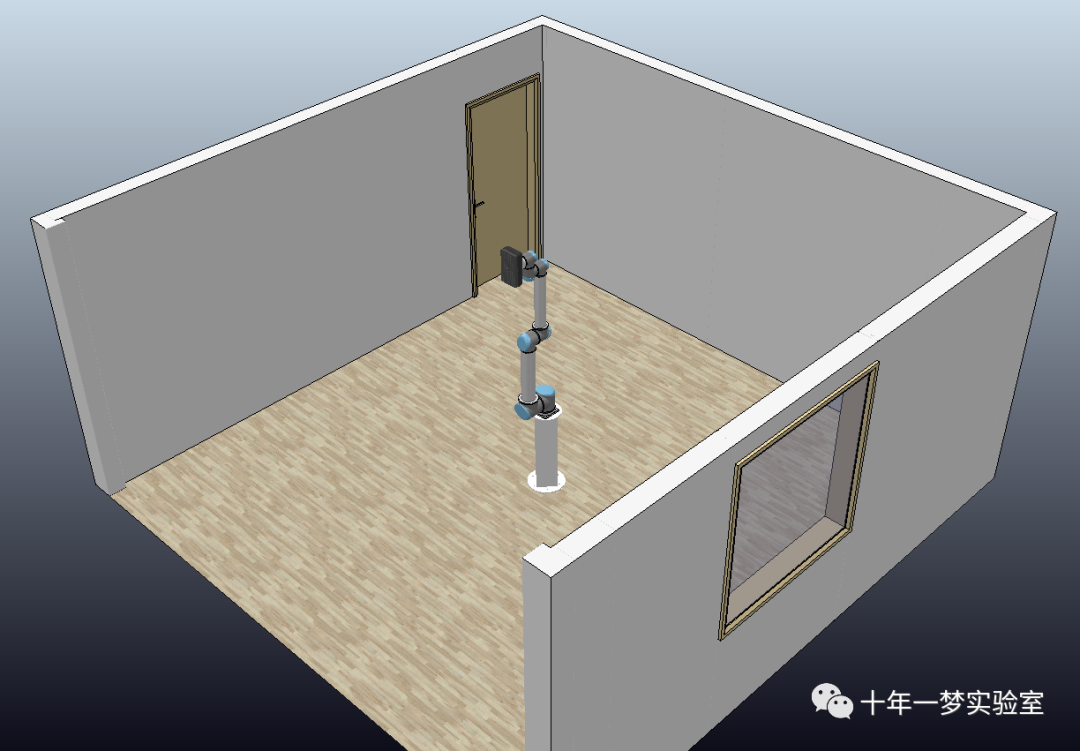
视频演示
主程序:
#include <iostream>
#include "universalRobotsKinematics.h"
#include "coppeliaSimTests.h"
#include "benchmarking.h"
int main()
{
//实例化一个 UR 对象
universalRobots::UR robot(universalRobots::URtype::UR5);
//universalRobots::UR robot(universalRobots::URtype::UR10);
//测试不同的目标关节值
const float targetJointValues[robot.m_numDoF] = { mathLib::rad(23), mathLib::rad(345), mathLib::rad(78), mathLib::rad(66), mathLib::rad(77), mathLib::rad(12) };
// 计算正向运动学并更新机器人的末端姿态
robot.forwardKinematics(targetJointValues);
std::cout << robot << std::endl;
//测试不同的目标末端姿态
const universalRobots::pose targetTipPose = robot.forwardKinematics(targetJointValues);
//计算逆运动学
float ikSols[robot.m_numIkSol][robot.m_numDoF] = {};
robot.inverseKinematics(targetTipPose, &ikSols);
std::cout << "Inverse kinematics" << std::endl;
for (unsigned int i = 0; i < robot.m_numIkSol; i++)
std::cout << "IK solution " << i + 1 << ": " << mathLib::deg(ikSols[i][0]) << " " << mathLib::deg(ikSols[i][1]) << " " << mathLib::deg(ikSols[i][2]) << " " <<
mathLib::deg(ikSols[i][3]) << " " << mathLib::deg(ikSols[i][4]) << " " << mathLib::deg(ikSols[i][5]) << std::endl;
进行 CoppeliaSim 测试,显示八个逆解
coppeliaSim::runCoppeliaSimTests(robot, targetTipPose);
//进行基准测试
universalRobots::UR benchmarkRobot(universalRobots::URtype::UR5);
benchmark::runBenchmarkTests(benchmarkRobot);
std::cin.get();
return 0;
}笔记:
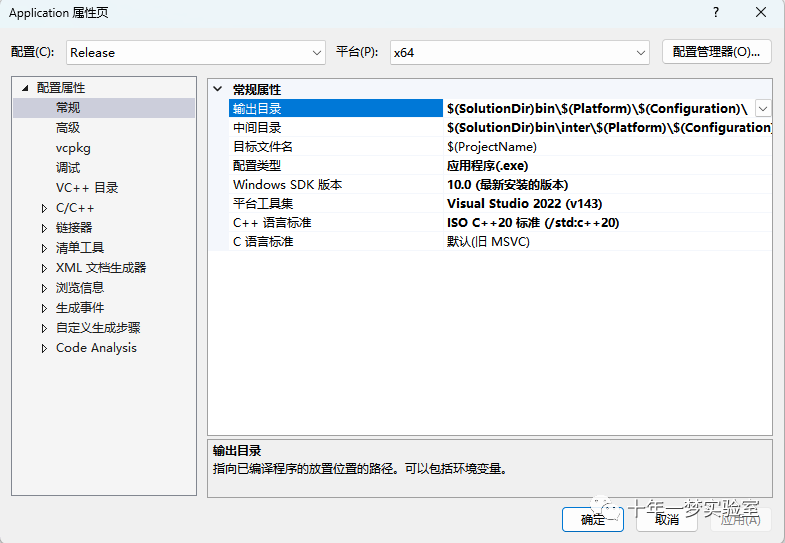
C++20
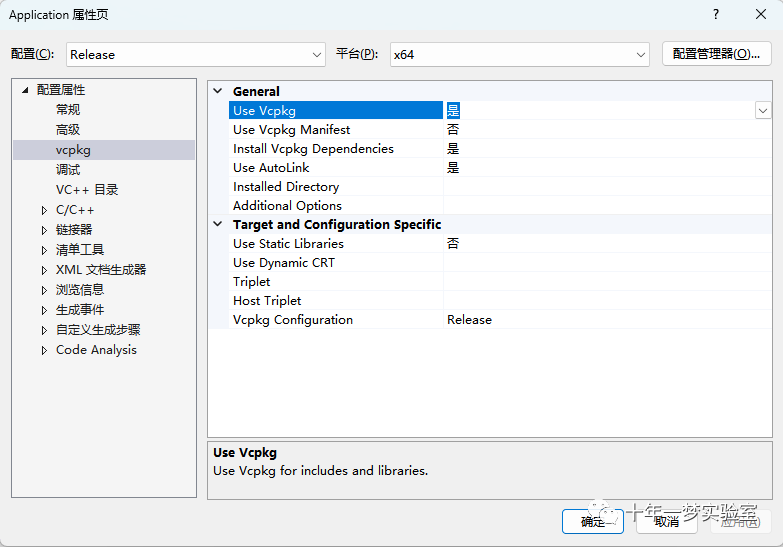
vcpkg
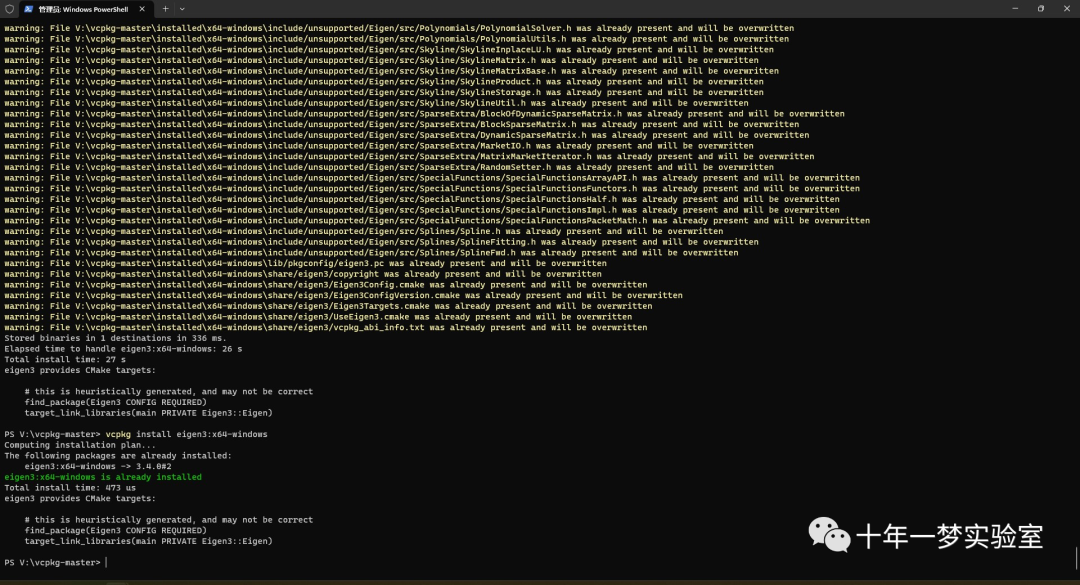
Eigen安装3.4
Eigen3.3会报错:“ { ”
Eigen::Matrix<float, m_numReferenceFrames, 4> m_MDHmatrix { {0.f, 0.f, m_d[0], m_jointState[0].m_jointValue},
{ mathLib::rad(-90), 0.f, m_d[1], m_jointState[1].m_jointValue + mathLib::rad(-90)},
{ 0.f, m_a[0], m_d[2], m_jointState[2].m_jointValue },
{ 0.f, m_a[1], m_d[3], m_jointState[3].m_jointValue },
{ 0.f, m_a[2], m_d[4], mathLib::rad(90) },
{ mathLib::rad(90), 0.f, 0.f, m_jointState[4].m_jointValue },
{ mathLib::rad(-90), 0.f, 0.f, mathLib::rad(-90) },
{ 0.f, m_a[3], m_d[5], m_jointState[5].m_jointValue },
{ 0.f, 0.f, m_d[6], 0.f }
};pose结构的构造函数
struct pose
{
float m_pos[3] = {}; // x y z (meters)
float m_eulerAngles[3] = {}; // alpha beta gamma (radians)
// 默认构造函数,将位置坐标和欧拉角初始化为0
pose()
: m_pos{ 0.0f, 0.0f, 0.0f }, m_eulerAngles{ 0.0f, 0.0f, 0.0f } {}
// 构造函数,接受位置坐标和欧拉角来初始化pose对象
pose(const float& pos1, const float& pos2, const float& pos3, const float& eulerAngles1, const float& eulerAngles2, const float& eulerAngles3)
: m_pos{ pos1, pos2, pos3 }, m_eulerAngles{ eulerAngles1, eulerAngles2, eulerAngles3 } {}
// 构造函数,接受位置坐标数组和欧拉角数组来初始化pose对象
pose(const float(&pos)[], const float(&eulerAngles)[])
: m_pos{ pos[0], pos[1], pos[2] }, m_eulerAngles{ eulerAngles[0], eulerAngles[1], eulerAngles[2] } {}
// 构造函数,接受位置坐标和旋转矩阵来初始化pose对象
pose(const float(&pos)[], const Eigen::Matrix3f& rotationMatrix)
: m_pos{ pos[0], pos[1], pos[2] }, m_eulerAngles{ rotationMatrix.eulerAngles(1, 2, 0).z(), rotationMatrix.eulerAngles(1, 2, 0).y(), rotationMatrix.eulerAngles(1, 2, 0).x() } {}
// 除以常数的运算,返回新的pose对象
pose divideByConst(const float& constant) const
{
return pose(m_pos[0] / constant, m_pos[1] / constant, m_pos[2] / constant, m_eulerAngles[0] / constant, m_eulerAngles[1] / constant, m_eulerAngles[2] / constant);
}
// 减法运算,返回新的pose对象
pose subtract(const pose& other) const
{
return pose(m_pos[0] - other.m_pos[0], m_pos[1] - other.m_pos[1], m_pos[2] - other.m_pos[2], m_eulerAngles[0] - other.m_eulerAngles[0], m_eulerAngles[1] - other.m_eulerAngles[1], m_eulerAngles[2] - other.m_eulerAngles[2]);
}
// 除法运算符重载,返回新的pose对象
pose operator/(const float& constant) const
{
return divideByConst(constant);
}
// 减法运算符重载,返回新的pose对象
pose operator-(const pose& other) const
{
return subtract(other);
}
};关节的构造函数:
struct joint
{
pose m_jointPose = {};// 关节姿态
float m_jointValue = 0.0f;// 关节值
// 默认构造函数,将关节姿态和关节值初始化为默认值
joint()
: m_jointPose(pose()), m_jointValue(0.0f) {}
};为什么要进行基准测试:(ChatGPT)
The End