“大家都比较关注激光雷达,尤其是在今年整个行业聚焦降本的大背景下,这个赛道还行不行?”6月8日,2023年度(第十四届)高工智能汽车开发者大会上,高工智能汽车研究院首发《2023-2025年中国汽车市场智能驾驶产业链市场预测报告》(以下简称《报告》)。
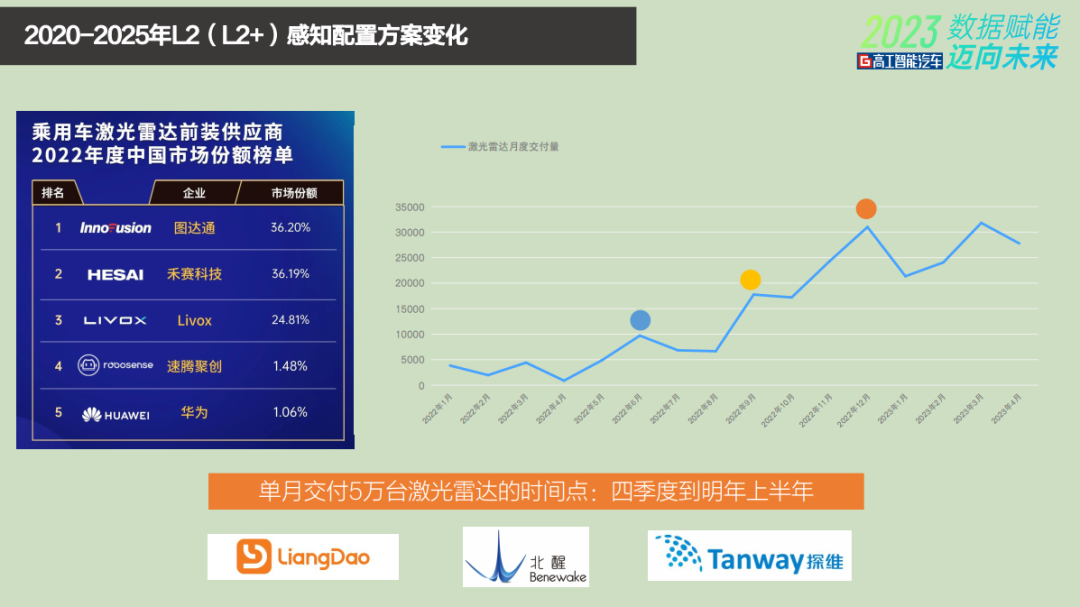
高工智能汽车研究院认为,激光雷达赛道正从“短跑”阶段过渡到“马拉松”阶段。从2022年的7-8月份开始,激光雷达半年时间内快速迈过三个槛(月均交付1万、2万、3万颗),过去的四个月里面交付量则在快速波动。
“除传统的禾赛科技、速腾聚创等,仍然还有一批公司在拿到定点,在今年下半年和明年开始释放,我们做了一个判断,整个市场单月交付超过5万颗的时间点应该在今年四季度到明年上半年,但市场一定会上下波动。”
除激光雷达外,高工智能汽车研究院对智驾传感器中的摄像头、毫米波雷达等细分赛道的演进趋势给出预判和思考。来自传感器各细分赛道的头部玩家,亦在此次峰会上结合自身的实践,指出当下产业的痛点和自身的切入点。
激光雷达赛道“起伏”
伴随智驾系统在2023年陷入性价比厮杀,激光雷达无疑成为受影响最大的传感器。
事实上,有头部Tier1的管理层在近期调研中表示,高阶智驾(包含NOA等)正从科学家驱动的实验室产品,进入工程师驱动的商业化产品,而如何以可商业化的路径(而非堆算力、堆传感器)落地,是目前业内的难题,诸多Tier1正尝试“极限压榨硬件潜力”“多场景硬件复用”的方案来推动高阶智驾的落地。
“2021-2022年,主机厂都想要把激光雷达作为自动驾驶标配放上来,2023年这个风向完全变了”,亮道智能高级副总裁筱原磊磊在演讲中表示,主机厂当下的诉求为:其一,实现同样功能的前提下,如何降低激光雷达搭载数量,乃至下一步能否拿掉激光雷达实现2.9;其二,如何更好地将激光雷达与视觉、毫米波雷达融合使用。

据介绍,亮道智能第一代 LDSense Satellite近场补盲激光雷达将于2023年Q3量产交付,10%反射率下测距能力为25米,角分辨率0.94° (0.47°) x 0.7°;第二代补盲激光雷达将于2024年推出,10%反射率下测距能力大于50米,视场角增大至120° x 105°,角分辨率提至0.5° x 0.5°。
成本和价值,是终端买单的两大核心考量因素。筱原磊磊认为,当前残酷竞争态势下,激光雷达厂商赢得生存之战的两大关键包括:其一,不断压缩成本的能力,从而对终端形成吸引力;其二,把激光雷达更好用起来的能力。
他进一步表示,对比单价几十元的超声波雷达、单价数百元的毫米波雷达,激光雷达当下数千元的价格仍处高位,未来激光雷达从数千元降至1000元左右,后续再降至“小几百元”,将是激光雷达能够真正大规模普及的关键所在。
视觉(摄像头)赛道亦在面临变化。
“过去三年(智驾舱外感知摄像头搭载组合)呈现非常明显的两极化,一方面1V的方案仍然是市场主流,另一方面高阶NOA带动了7-9V,包括13V市场。”对于视觉赛道,高工智能汽车研究院在会议上表示。
尤为值得注意的是,传统L2摄象头赛道与L2+摄像头模组赛道(剔除特斯拉),前六名供应商完全不同,手机等各行业的摄像头厂商,正纷纷涌入L2+模组市场。
具体来看,2023年1-4月L2摄像头(一体机)市场份额中,博世、电装、采埃孚、Veoneer、法雷奥、安波福分别占据前六名,但在L2+摄像头(模组)市场份额中,分别为舜宇智领、联创电子、知行科技、广州晶华、德赛西威。
以舜宇智领为例,其为“果链龙头”舜宇光学科技(港股上市公司)旗下公司。根据舜宇光学科技方面的信息,受制于消费电子市场复苏不及预期,其2023年1-4月手机镜头出货量连续四个月出现同比下滑,车载镜头正成为舜宇光学科技的“第二成长曲线”,根据预期,2023年其车载镜头出货量将同比增长15%,车载模组收入有望翻倍至20亿元。
视觉赛道上,双目立体视觉玩家正尝试破局。
“我们经常会问自己,如何在理性降本的行业环境下,做出消费者愿意买单、体现科技价值和社会价值、便于规模普及的智能驾驶的功能。我们找到这个答案,面对这个城市的复杂场景,我们认为立体视觉是一个极优的选择。”元橡科技CTO任杰称。
任杰解释称,双目立体视觉天然具有测量能力,不依赖于AI训练就可以检测出各种障碍物,包括不限于路墩,翻车,路障等各类一般障碍物,能有效避免单目AI漏检产生的危险事故。同时,其可以更早发现鬼探头危险趋势,更早提供规控信息进行制动。
“越来越多的主机厂开始在新的产品中从单目切换为双目方案,包括大众、本田、极狐、零跑、领克等,以提升L2以上更高级别的安全性和可靠性”,尤为值得一提的是,全球唯二的L3量产车(奔驰L3自动驾驶、本田Legend Hybrid EX L3自动驾驶),均都配备双目立体视觉系统。
根据介绍,元橡科技自主设计研发智能双目算法及车规芯片,为车载及机器人提供智能双目软硬一体全栈解决方案(算法+芯片+模组+相机+软件),为目前国内唯一大规模车载前装量产双目(超20万套)提供商。
毫米波雷达赛道“两个拐点”
“第一个拐点,我们判断今年单车平均搭载会超过1颗毫米波雷达,第二个拐点应该会出现在2025年,单车平均搭载2.5到3颗。”对于毫米波雷达赛道,高工智能汽车研究院在会议上做出判断。

高工智能汽车研究院认为,2020-2022年毫米波雷达市场整体增速在20%-40%,并未因特斯拉的使用与否出现整个风向的扭转。对于市场密切关注的4D毫米波雷达赛道,目前仍处于小规模导入期,“从去年的预估来看,今年肯定远远低于预期,量并没有起的那么快”。
其中,较为值得注意的是,从2023年1季度角雷达市场份额来看,国内供应商走多,比如森思泰克市场份额为13.44%,排名第4,福瑞泰克、华为市场份额分别为2.41%、2.02%,分别排名第7、第8,背后原因包括:其一,过去两年的缺芯带来的国内供应商替代;其二,降本因素考量。
具体来看,伴随毫米波雷达从3D到4D时代的演进,不管是新进入者,还是传统巨头,都在积极抓住这一窗口期。
根据高工智能汽车此前系统梳理,传统毫米波雷达国际巨头在近年来已全部布局4D市场,意图在产业迭代中守住其地位,市场上同时涌现诸多新晋玩家,欲在产业迭代中抓住窗口期突围。
整体来看,这些玩家布局4D市场的技术路径包括三种:其一,用传统芯片做收发通道的堆叠;其二,自研芯片;其三,用软件算法能力提升性能。
行易道采用毫米波雷达成像新技术:稀疏信号成像。
从结果上看,行易道ALRR300仅用两片级联(6T8R),就实现角分辨率0.6°(H)×0.8°(V),视场角为120°(H)×30°(V),其他参数方面,探测距离为300米,速度分辨率0.11 m/s,尺寸为91mm×79mm×16.7mm。该产品2022年12月已获得国际知名车企定点,预计2023年2季度量产。
“ALRR300的技术创新,解决了压缩感知算法第一次应用在汽车雷达中所带来的理论及工程的问题”,行易道副总裁袁泽雁称,稀疏信号处理是指从包含大量冗余信息的原始数据中提取出尽可能少的采样数据,对原始信号进行有效逼近和恢复的信号处理技术,压缩感知(Compressive Sensing,CS,2006)理论则是稀疏信号处理领域的一个重要进展。
据介绍,压缩感知算法为机载雷达、星载雷达领域经过工程化验证的技术,行易道于2019年联合中科院开发车载压缩感知算法,历时接近4年的理论、技术攻坚,终获突破(2021年,行易道与中科院共同申请压缩感知超分辨算法相关发明专利)。

木牛科技方面推出4D毫米波雷达的时间更早。
具体来看,2019年木牛科技在底特律北美汽车展发布了其首款4D成像雷达,一举拿下全球排名第一的紧凑型机械车辆制造商Bobcat(斗山山猫)的定点合作项目。木牛科技当下的4D毫米波雷达产品为179-48,视场角为120°×24°,角分辨率为2°×3°;2023年第3季度会推出全新的方案,对应产品为179-192,视场角为120°×24°,角分辨率为0.8°×1.2°。
据木牛科技解决方案总经理潘策介绍,木牛科技针对L0-L2提供两种毫米波雷达解决方案:其一,4R方案,双前角+双后角;其二,1R1V方案,其中的1R为前向雷达。针对L2.5级以上智驾系统,提供两种毫米波雷达解决方案:其一,超高性价比版的5RnV方案,5R为1个前向雷达、4个角雷达;其二,高阶性能版5RnV方案,5R为1个4D成像雷达、4个角雷达。
“目前的4D成像雷达的诉求并不是完全取代激光雷达,我们认为取代不了激光雷达,但是可以把3个激光雷达变成1个,这是它的价值所在。”安波福ADAS工程总监张磊在此次大会演讲中称。
据介绍,安波福第七代雷达系统在其对应的ADAS中扮演重要角色,相对于市场上大多以视觉为中心的智驾感知系统,安波福除重视视觉外,同样非常重视雷达的系统感知功能,从而对系统感知的可靠性进行扩充,降低对视觉和激光雷达的依赖性。
张磊认为,ADAS系统的“根基”在于感知系统,“感知非常难,有很多长尾的场景等待我们不断的发现”,在挖掘传感器性能时,安波福尝试引入机器学习的的方式,提升毫米波雷达的探测能力,产品优势包括纯雷达行人与自行车检测、静止物体检测等。