【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
nand flash相信大家并不陌生,现在很多的固态硬盘上面,其实有很多的nand flash。只不过根据存储单元,分成slc、mlc和tlc三种。早在差不多20年前,那个时候大家还都是学习s3c2440,标准的核心板就是soc+ddr+nandflash,或者是soc+ddr+norflash。那时,norflash一般是spi接口的,nandflash一般是专门的ip controller直接控制的。
后来随着nandflash成本的快速降低,出现了很多种nandflash的存储产品,这里面有nvme ssd、有sata ssd、有emmc、还有今天所说的spi nand flash。这些产品的共同特点就是,都使用了nandflash,但是外部的接口是不一样的,有的简单一些,有的比较复杂,甚至内部添加了很多的算法来解决nand flash固有的一些缺点。
之前我们在刚学v3s的时候,有一张v3s芯片手册上的启动图,不知道大家还有没有印象,
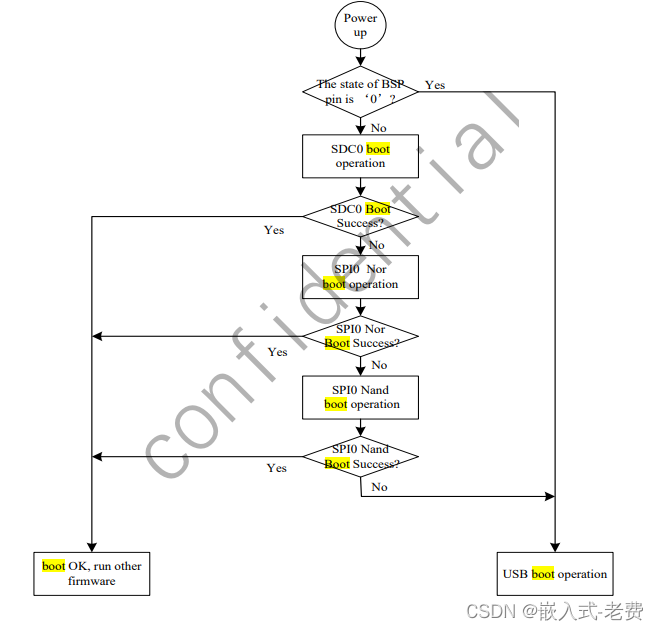
这张图清晰地说明了soc启动的四个顺序,分别是usb启动、sd卡启动、spi norflash启动、spi nandflash启动四种方式。前面我们测试的时候一直走的是sd卡启动,但是从成本和稳定性上说,spi nandflash其实是最合适的。
虽然spi norflash也可以当成v3s的启动媒介,但是一般来说,norflash不是很大,存储的东西有限。稍微多一点的图片、视频和动态库,norflash就放不下了。而sd卡虽然放的东西比较多,但是本身成本略贵,且由于是机械插入,在一些机器人领域,或者说存在震动场景的领域,sd卡也有点不太合适的。所以,综合来说,很多厂家都会选择spi nandflash当成启动和存储系统数据的基本介质,用户自己的sd卡可以作为补充,保存一些自己的资料,待v3s启动之后,mount到系统上面即可。
另外有一个比较有意思的现象,大家也可以注意下,那就是目前v3s和其他芯片沟通比较多的是哪几种协议。除了和flash沟通的spi,还有和点屏芯片沟通的gpio,和触控芯片沟通的iic,以及和wifi芯片沟通的sd接口。此外,串口232、485也经常用,不过这一类的驱动就不写在底层,一般是通过上层app去写,这一点和网络设备的驱动有点类似。
1、原理图

系统使用的芯片是mx35lf1ge4ab,这部分大家不要看到spi接口的flash,就默认为norflash,其实可以把mx35lf1ge4ab的芯片手册找过来看下,上面就写的非常明白,
接口部分就是常规的spi四线接口,这部分没有疑问,主要就是cs、clk、miso、mosi。这其中miso上有一个按键s6,这个需要注意下,主要用于usb烧入的时候使用,防止系统默认用spi nandflash加载系统。如果按键被按下,那么miso的数据就没有办法被v3s访问到,就不会从spi加载系统了。
2、设备树文件
默认sun8i-v3s-licheepi-zero.dtsi文件当中是没有spi的相关内容的。所以,这部分的脚本需要自己手动添加一下,
&spi0 {
pinctrl-names = "default";
pinctrl-0 = <&spi0_pins>;
status = "okay";
flash@0 {
#address-cells = <1>;
#size-cells = <1>;
compatible = "spi-nand";
reg = <0>;
spi-max-frequency = <40000000>;
partitions {
compatible = "fixed-partitions";
#address-cells = <1>;
#size-cells = <1>;
partition@0 {
label = "all";
reg = <0x000000 0x8000000>;
};
};
};
};
3、驱动代码
关于驱动代码这部分,由于我们这次所要驱动的芯片是spi-nandflash的部分。所以驱动其实很容易就分成两部分,一部分是spi、一部分是nandflash。本质上来说,驱动就是用v3s的spi接口按照mx35lf1ge4ab芯片手册的命令要求,通过命令去访问或者写入flash里面的数据。一开始的时候,很自然地我们会去找drivers/spi和drivers/mtd/nand对应的驱动代码。
后来,随着一些资料的查找,我们发现在kernel 4.19之后,spi nandflash被作为独立的一个class,在驱动里面被单独分割了出来。从某种意义上说,只要升级kernel,修改一下.config配置文件,就可以实现相关的驱动加载了。
https://github.com/torvalds/linux/tree/v4.18/drivers/mtd/nand
https://github.com/torvalds/linux/tree/v4.19/drivers/mtd/nand另外,结合v3s上面的linux分支代码,我们最终决定把内核升级到5.2.y,同时还需要进行两个设置。这里只是升级了kernel,编译器还是之前的6.3。首先,打开menuconfig配置表,
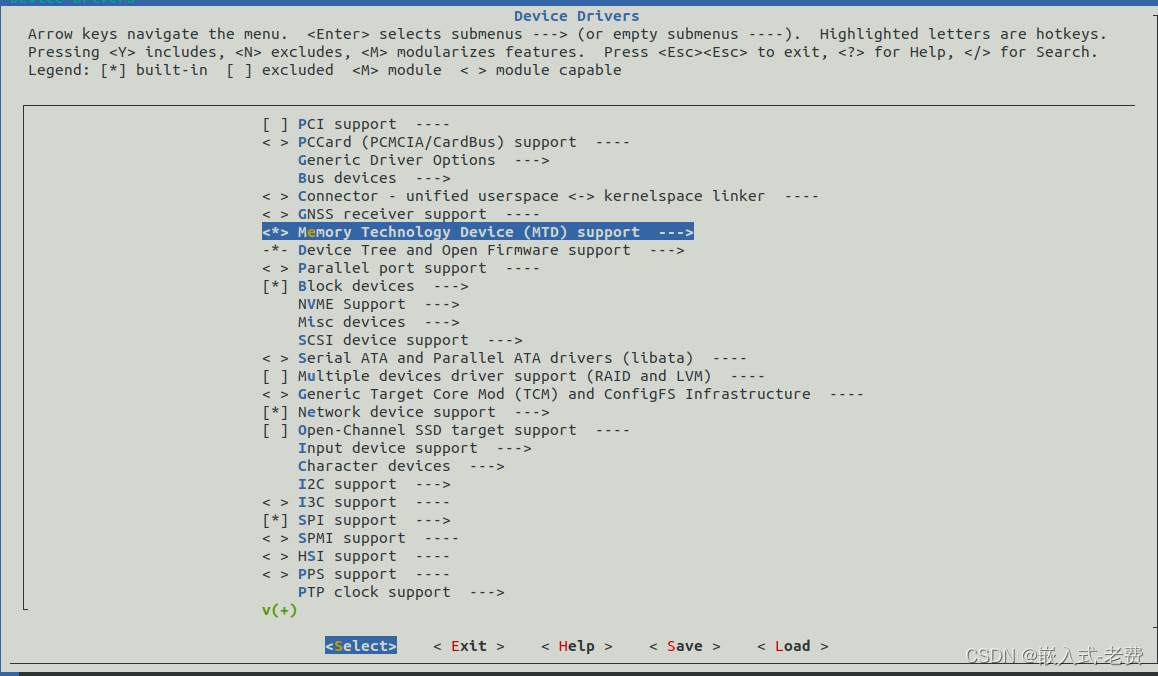
make ARCH=arm menuconfig首先,使能mtd,
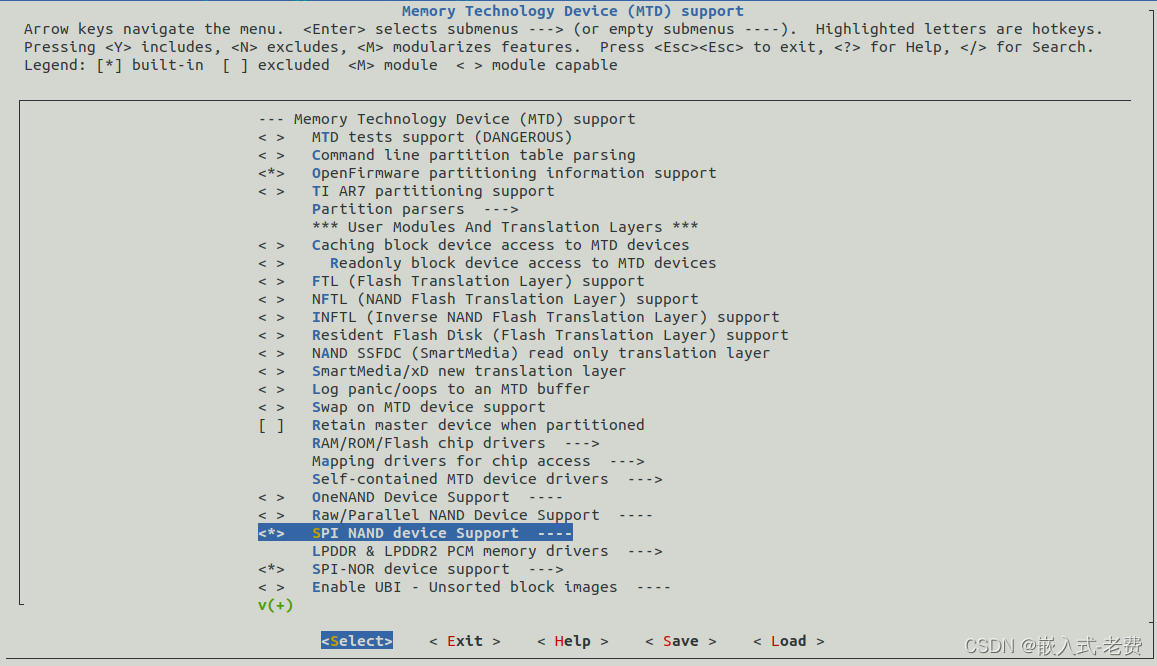
接着使能spi nand,
有了这两个部分,下面就可以开始编译了,
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf-有些同学害怕配置出错,担心把原来的配置文件弄坏,其实没有关系,这个时候只需要把之前的文件.config保存备份一下。如果后续实验成功了,只需要diff一下两个.config文件的区别是什么就可以了,

4、烧入image和dtb文件
编译好之后,需要分别烧入image和dtb文件到sd卡,因为这两个文件都发生了改动。
sudo cp /home/feixiaoxing/Desktop/linux-zero-5.2.y/arch/arm/boot/zImage .
sudo cp /home/feixiaoxing/Desktop/linux-zero-5.2.y/arch/arm/boot/dts/sun8i-v3s-licheepi-zero-with-480x272-lcd.dtb .
5、开始测试和验证
查看mtd驱动是不是真的加载到开发板上面了,主要看两个地方就可以了。第一,就是看下启动起来的时候,日志里面有没有nandflash被正确加载的打印,
[ 0.763876] spi-nand spi0.0: Macronix SPI NAND was found.
[ 0.769366] spi-nand spi0.0: 128 MiB, block size: 128 KiB, page size: 2048, OOB size: 64
[ 0.778279] 1 fixed-partitions partitions found on MTD device spi0.0
[ 0.784638] Creating 1 MTD partitions on "spi0.0":
[ 0.789525] 0x000000000000-0x000008000000 : "all"
第二,等系统正常启动之后,可以ls -l /dev/mtd*一下,如果没有问题的话,应该可以看到对应的设备节点,
# ls -l /dev/mtd0*
crw------- 1 root root 90, 0 Jan 1 00:00 /dev/mtd0
crw------- 1 root root 90, 1 Jan 1 00:00 /dev/mtd0ro
有了上面的内容,基本就可以认为说,目前为止,nandflash已经被正确加载了。
6、后续的工作
目前的nandflash,只是作为sd卡启动后的一个外设存在的。我们对它的了解还比较基础,有兴趣的朋友可以移植一下mtd-utils工具,进一步对/dev/mtd0进行操作,相信会有更多的收获。