第六章 彩色图像处理
6.1彩色基础
颜色特性:
- 亮度:表达了无色的强度概念
- 色调:光波混合中与波长有关的属性(即颜色)
- 饱和度:即相对纯净度,或一种颜色混合白光的数量。饱和度与所加白光成反比
光的混合:

6.2彩色基础
6.2.1RGB彩色模型
在RGB 彩色模型中表示的图像由3个分量图像组成,每种原色一幅分量图像。当送人RGB 监视器时,这3幅图像在屏幕上混合生成一幅合成的彩色图像。在RGB空间中,用于表示每个像素的比特数称为像素深度。考虑一幅RGB 图像,其中每一幅红、绿、蓝图像都是一幅8比特图像,在这种条件下,可以说每个RGB彩色像素[即(R, G, B)值的三元组]有24比特的深度(3个图像平面乘以每个平面的比特数)。术语全彩色图像通常用来表示一幅24比特的RGB 彩色图像。在24比特RGB图像中,颜色总数是
(
2
8
)
3
=
16777216
(2^8)^3=16777216
(28)3=16777216。
6.2.2CMY和CMYK彩色模型
[ C M Y ] = [ 1 1 1 ] − [ R G B ] \begin{bmatrix}C\\ M\\ Y\end{bmatrix}=\begin{bmatrix}1\\ 1\\ 1\end{bmatrix}-\begin{bmatrix}R\\ G\\ B\end{bmatrix} CMY = 111 − RGB
HSI颜色空间是从人的视觉系统出发,用色调(Hue)、色饱和度(Saturation)和亮度(Intensity)来描述色彩。HSI颜色空间可以用一个圆锥空间模型来描述。用这种描述HSI色彩空间的圆锥模型相当复杂,但确能把色调、亮度和色饱和度的变化情形表现得很清楚。
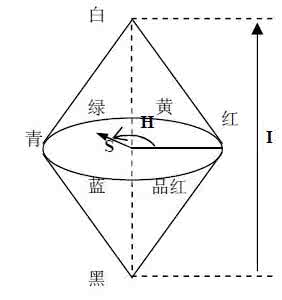
上图是HSI的双圆锥模型。模型中双圆锥的上顶点对应I=1,即白色;下顶点对应I=0,即黑色。色调(色相)用角度表示,0°表示红色,互补色相差180°。饱和度的取值范围从0到1,0对应于垂直轴的中心线(也就是说这条线上没有色彩,只有灰度),I=0.5时红色的饱和度为1,颜色空间中的点到I轴的距离即是其饱和度。
RGB转HSI:
给定一幅RGB彩色格式的图像,每个RGB像素的H分量可用下式得到:
H
=
{
θ
,
B
⩽
G
360
−
θ
,
B
>
G
H=\begin{cases}{\theta},\quad&B\leqslant G\\ 360-\theta,\quad&B>G\end{cases}
H={θ,360−θ,B⩽GB>G
其中,
θ
=
arccos
[
1
2
[
(
R
−
G
)
+
(
R
−
B
)
]
[
(
R
−
G
)
2
+
(
R
−
B
)
(
G
−
B
)
]
1
/
2
]
\theta=\arccos\left[\frac{\frac{1}{2}[(R-G)+(R-B)]}{\left[(R-G)^{2}+(R-B)(G-B)\right]^{1/2}}\right]
θ=arccos[[(R−G)2+(R−B)(G−B)]1/221[(R−G)+(R−B)]]
饱和度分量由下式给出:
S
=
1
−
3
(
R
+
G
+
B
)
[
min
(
R
,
G
,
B
)
]
S=1-\frac{3}{(R+{G}+B)}\big[\min(R,{G},{B})\big]
S=1−(R+G+B)3[min(R,G,B)]
最后,强度分量由下式给出:
I
=
1
3
(
R
+
G
+
B
)
I=\frac{1}{3}(R+G+B)
I=31(R+G+B)
HSI转RGB
- RG扇区( 0 ∘ ⩽ H < 12 0 ∘ 0^{\circ}\leqslant H<120^{\circ} 0∘⩽H<120∘): B = I ( 1 − S ) R = I [ 1 + S cos H cos ( 6 0 ∘ − H ) ] G = 3 I − ( R + B ) \begin{gathered}B=I\left(1-S\right) \\R=I\left[1+{\frac{S\cos H}{\cos(60^{\circ}-H)}}\right] \\G=3I-\left(R+B\right) \end{gathered} B=I(1−S)R=I[1+cos(60∘−H)ScosH]G=3I−(R+B)
- GB扇区( 12 0 ∘ ⩽ H < 24 0 ∘ 120^{\circ}\leqslant H<240^{\circ} 120∘⩽H<240∘): H = H − 12 0 ∘ R = I ( 1 − S ) G = I [ 1 + S cos H cos ( 6 0 ∘ − H ) ] B = 3 I − ( R + G ) \begin{gathered}H=H-120^{\circ}\\ R=I\left(1-S\right) \\ G=I\left[1+{\frac{S\cos H}{\cos(60^{\circ}-H)}}\right] \\ B=3I-(R+G) \end{gathered} H=H−120∘R=I(1−S)G=I[1+cos(60∘−H)ScosH]B=3I−(R+G)
- BR扇区( 24 0 ∘ ⩽ H < 36 0 ∘ 240^{\circ}\leqslant H<360^{\circ} 240∘⩽H<360∘): H = H − 24 0 ∘ R = I ( 1 − S ) G = I [ 1 + S cos H cos ( 6 0 ∘ − H ) ] B = 3 I − ( G + B ) \begin{gathered}H=H-240^{\circ}\\ R=I\left(1-S\right) \\ G=I\left[1+{\frac{S\cos H}{\cos(60^{\circ}-H)}}\right] \\ B=3I-(G+B) \end{gathered} H=H−240∘R=I(1−S)G=I[1+cos(60∘−H)ScosH]B=3I−(G+B)
6.3伪彩色图像处理
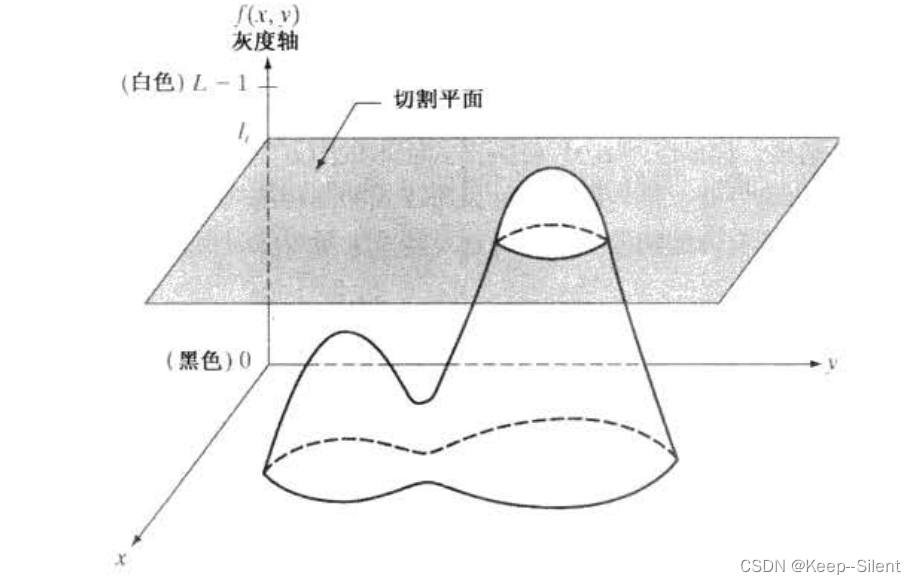
6.3.1灰度分层
灰度分层(有时称为密度分层)和彩色编码技术是伪彩色图像处理的最简单的例子之一。如果一幅图像被描述为三维函数,则分层方法可以看成是放置一些平行于该图像的坐标平面的平面,然后,每个平面在相交的区域中“切割”图像函数。下图显示了使用位于f(x, y) =1处的一个平面把该图像函数切割为两部分的一个例子。
6.3.2灰度到彩色的变换
import cv2
import numpy as np
import matplotlib.pyplot as plt
import random
import math
import copy
def cv2_show(*args):
for ttt in range(len(args)):
img=args[ttt]
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
def plt_show(*args):
for ttt in range(len(args)):
img = args[ttt]
if (len(img.shape) == 3):
img = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)
elif (len(img.shape) == 2):
img = cv2.cvtColor(img, cv2.COLOR_GRAY2RGB)
plt.subplot(331+ttt), plt.imshow(img)
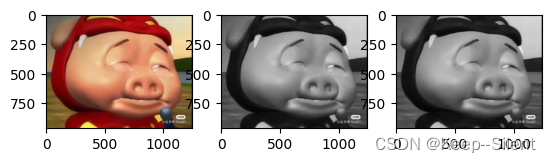
img=cv2.imread('zzx.jpg')
img2 = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
img3=cv2.cvtColor(img2, cv2.COLOR_GRAY2BGR)
plt_show(img,img2,img3)
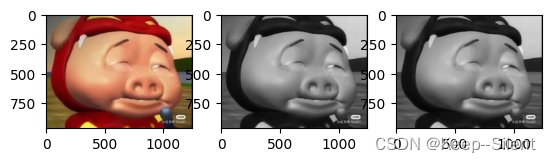
上图中分别是:彩图img,彩图转灰度图img2,灰度图转彩图img3
其中,彩图转灰度图时:
G
R
A
Y
=
0.3
∗
R
+
0.59
∗
G
+
0.11
∗
B
GRAY=0.3*R+0.59*G+0.11*B
GRAY=0.3∗R+0.59∗G+0.11∗B
而灰度图转彩图时:
[
R
,
G
,
B
]
=
[
G
R
A
Y
,
G
R
A
Y
,
G
R
A
Y
]
[R,G,B]=[GRAY,GRAY,GRAY]
[R,G,B]=[GRAY,GRAY,GRAY]
6.4全彩色图像处理基础
令c代表RGB彩色空间中的一个任意向量:
C
=
[
c
R
c
G
c
B
]
=
[
R
G
B
]
\mathcal{C}=\begin{bmatrix}c_R\\ c_G\\ c_B\end{bmatrix}=\begin{bmatrix}R\\ G\\ B\end{bmatrix}
C=
cRcGcB
=
RGB
该式指出,c的分量仅是一幅彩色图像在一点处的RGB 分量。我们可以这样认为,彩色分量是坐标(x, y)的函数,表示为:
c
(
x
,
y
)
=
[
c
R
(
x
,
y
)
c
G
(
x
,
y
)
c
B
(
x
,
y
)
]
=
[
R
(
x
,
y
)
G
(
x
,
y
)
B
(
x
,
y
)
]
\mathcal{c}(x,y)=\begin{bmatrix}c_R(x,y)\\c_G(x,y)\\c_B(x,y)\end{bmatrix}=\begin{bmatrix}R(x,y)\\G(x,y)\\B(x,y)\end{bmatrix}
c(x,y)=
cR(x,y)cG(x,y)cB(x,y)
=
R(x,y)G(x,y)B(x,y)
6.5彩色变换
6.5.1公式
公式:
g
(
x
,
y
)
=
T
[
f
(
x
,
y
)
]
g(x,y)=T\left[f(x,y)\right]
g(x,y)=T[f(x,y)]
关键在于T的设计
6.5.2补色
img=cv2.imread('zzx.jpg')
K=255
n,m,o=img.shape
img2=copy.deepcopy(img)
for i in range(n):
for j in range(m):
for k in range(o):
img2[i][j][k]=K-img[i][j][k]
plt_show(img,img2)
6.5.3彩色分层
对一幅彩色图像分层的最简方法之一是,把某些感兴趣区域之外的彩色映射为不突出的无确定性质的颜色。如果感兴趣的颜色由宽为w、中心在原型(即平均)颜色点并具有分量( a 1 , a 2 , … , a n a_1, a_2,…,a_n a1,a2,…,an)的立方体所包围,则必要的一组变换为
s i = { 0.5 , [ ∣ r j − a j ∣ > W 2 ] 1 ≤ j ≤ n i = 1 , 2 , … , n r i , e l s e s_i=\begin{cases} 0.5, &\Big[|r_j-a_j|>\frac{W}{2}\Big]_{1 \leq j \leq n}\quad i=1,2,\dots,n \\ r_i,& \mathrm{else}\end{cases} si=⎩ ⎨ ⎧0.5,ri,[∣rj−aj∣>2W]1≤j≤ni=1,2,…,nelse
6.5.5直方图处理
def hist_show(img,name):#展示图片的直方图
v=img.reshape(-1)
n=len(v)
plt.hist(v,weights=[1/n]*n,bins=64, alpha=0.5,label=name)
plt.legend()
def getImgProbability(img):# 得到概率
v=img.reshape(-1)
n=len(v)
k=1/n
dt={i:0 for i in range(256)}
for t in v:
dt[t]+=k
return [dt[t] for t in dt]
def histogramEqualization(img): #得到T(r)
weight2=getImgProbability(img)
for t in range(1,256):
weight2[t]+=weight2[t-1]
return [x*255 for x in weight2]
def imgHistogramEqualization(img):
Tr=histogramEqualization(img)
img_t=np.zeros(img.shape)
for x in range(len(img)):
for y in range(len(img[x])):
img_t[x][y]=int(Tr[img[x][y]])
return img_t.astype(np.uint8)
img=cv2.imread('me.jpg')
imgR,imgG,imgB=img[:,:,0],img[:,:,1],img[:,:,2]
print(imgR.shape)
imgR=imgHistogramEqualization(img[:,:,0])
imgG=imgHistogramEqualization(img[:,:,1])
imgB=imgHistogramEqualization(img[:,:,2])
img2= cv2.merge([imgR,imgG,imgB])
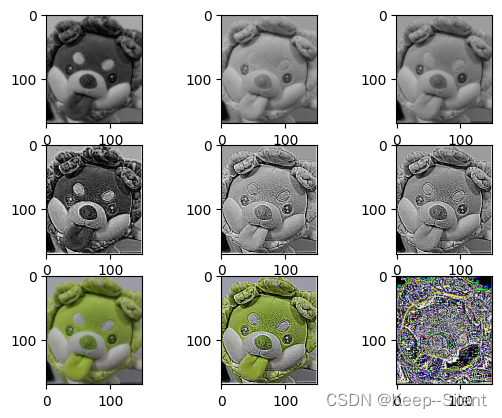
plt_show(img[:,:,0],img[:,:,1],img[:,:,2],
imgR,imgG,imgB,
img,img2)
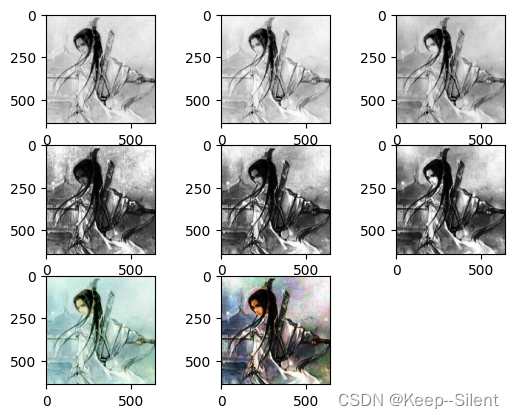
上图分别为:
原图R通道,原图B通道,原图G通道
R直方图均衡化 ,B直方图均衡化,G直方图均衡化
原图,原图直方图均衡化
hist_show(img[:,:,1],'Before')
hist_show(imgG,'After')
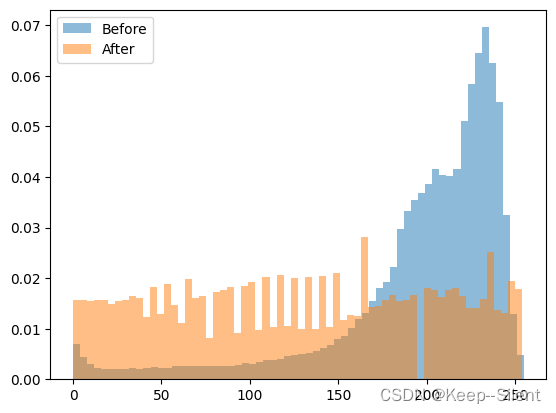
上图为原图G通道的直方图,和G通道直方图均衡后的直方图
同第三章的直方图处理一样,进行直方图均衡处理。不同点在于彩色是三通道(RGB),需要分别处理后进行合成。
6.6平滑和锐化
6.6.1彩色图像平滑
在一幅RGB彩色图像中,令 S x y S_{xy} Sxy表示中心位于 ( x , y ) (x, y) (x,y)的邻域定义的一组坐标。在该邻域中RGB分量的向量平均值为 c ‾ ( x , y ) = 1 K ∑ ( s , t ) ∈ S s x y c ( s , t ) \overline{\mathfrak{c}}(x,y)=\frac{1}{K}\sum_{(s,t)\in S_{s_{xy}}}{c}(s,t) c(x,y)=K1(s,t)∈Ssxy∑c(s,t) 其遵循向量相加原则: C ‾ ( x , y ) = [ 1 K ∑ ( s , t ) ∈ s x y R ( s , t ) 1 K ∑ ( s , t ) ∈ s x y G ( s , t ) 1 K ∑ ( s , t ) ∈ s x y B ( s , t ) ] \overline{\mathcal{C}}(x,y)=\begin{bmatrix}\displaystyle \frac{1}{K}\sum_{(s,t)\in s_{xy}}R(s,t)\\ \displaystyle \frac{1}{K}\sum_{(s,t)\in s_{xy}}G(s,t)\\ \displaystyle \frac{1}{K}\sum_{(s,t) \in s_{xy}}B(s,t)\end{bmatrix} C(x,y)= K1(s,t)∈sxy∑R(s,t)K1(s,t)∈sxy∑G(s,t)K1(s,t)∈sxy∑B(s,t)
6.6.2彩色图像锐化
在第三章灰度变换与空间滤波中,已经提到过锐化,仅需将三通道分别处理后合并即可 ∇ 2 [ c ( x , y ) ] = [ ∇ 2 R ( x , y ) ∇ 2 G ( x , y ) ∇ 2 B ( x , y ) ] \nabla^2\left[c(x,y)\right] = \begin{bmatrix} \nabla^2R(x,y)\\ \nabla^2G(x,y) \\ \nabla^2B(x,y)\end{bmatrix} ∇2[c(x,y)]= ∇2R(x,y)∇2G(x,y)∇2B(x,y)
def WaveFilter(img,w):
size=len(w)
n,m=len(img),len(img[0])
img2=np.zeros([n,m])
img=np.pad(img,(size-1)//2)
for x in range(n):
for y in range(m):
f=img[x:x+size,y:y+size]
img2[x][y]=np.vdot(f,w) +img[x][y]
if img2[x][y]<0:
img2[x][y]=0
elif img2[x][y]>255:
img2[x][y]=255
img2=img2.astype(np.uint8)
return img2
img=cv2.imread('caigou.jpg')
imgR,imgG,imgB=img[:,:,0],img[:,:,1],img[:,:,2]
print(imgR.shape)
imgR=WaveFilter(img[:,:,0],[[-1,-1,-1],[ -1,8,-1],[ -1,-1,-1]])
imgG=WaveFilter(img[:,:,1],[[-1,-1,-1],[ -1,8,-1],[ -1,-1,-1]])
imgB=WaveFilter(img[:,:,2],[[-1,-1,-1],[ -1,8,-1],[ -1,-1,-1]])
img2= cv2.merge([imgR,imgG,imgB])
plt_show(img[:,:,0],img[:,:,1],img[:,:,2],
imgR,imgG,imgB,
img,img2,img2-img)
上图分别为:
原图R通道,原图B通道,原图G通道
R拉普拉斯锐化 ,BR拉普拉斯锐化,GR拉普拉斯锐化
原图,原图R拉普拉斯锐化,原图和拉普拉斯锐化图相减
6.7基于彩色的图像分割
6.7.2RGB向量空间中的分割
欧式距离:
D
(
z
,
a
)
=
∥
z
−
a
∥
=
[
(
z
−
a
)
T
(
z
−
a
)
]
1
2
=
[
(
z
R
−
a
R
)
2
+
(
z
G
−
a
G
)
2
+
(
z
B
−
a
B
)
2
]
1
2
D(z,\boldsymbol{a})=\|z-\boldsymbol{a}\|=\left[(z-\boldsymbol{a})^{\text{T}}(\boldsymbol{z}-\boldsymbol{a})\right]^{\frac{1}{2}}=\left[(z_R-a_R)^2+(z_G-a_G)^2+(z_B-a_B)^2\right]^{\frac{1}{2}}
D(z,a)=∥z−a∥=[(z−a)T(z−a)]21=[(zR−aR)2+(zG−aG)2+(zB−aB)2]21
给定一个任意的彩色点,如同采用距离公式那样,通过确定它是否在盒子表面或内部来进行分割。
6.8彩色图像中的噪声
通常,彩色图像的噪声内容在每个彩色通道中具有相同的特性,但噪声对不同的彩色通道所造成的影响不同。一种可能是个别通道的电子学故障。然而,不同的噪声水平像是由每个彩色通道的相对照射强度的差异造成的。例如,在CCD摄像机中红色滤镜的使用将减小用于红色传感器的照射强度。CCD传感器在低照明水平下就是噪声源,因此,这种情况下得到的RGB 图像的红色分量图像与其他两幅分量图像相比往往是噪声源。