参考:
https://chtseng.wordpress.com/2018/09/18/%E5%A6%82%E4%BD%95%E4%BC%B0%E7%AE%97%E5%89%8D%E6%96%B9%E4%BA%BA%E7%89%A9%E7%9A%84%E8%B7%9D%E9%9B%A2/
WeChat_20230611160620
1、cv2加载摄像头慢解决方法,单独重新cv2.VideoCapture()
https://blog.csdn.net/captain5339/article/details/128857313
class VideoCapture:
"""Customized VideoCapture, always read latest frame"""
def __init__(self, name):
self.cap = cv2.VideoCapture(name)
self.q = queue.Queue(maxsize=3)
self.stop_threads = False # to gracefully close sub-thread
th = threading.Thread(target=self._reader)
th.daemon = True # 设置工作线程为后台运行
th.start()
# 实时读帧,只保存最后一帧
def _reader(self):
while not self.stop_threads:
ret, frame = self.cap.read()
if not ret:
break
if not self.q.empty():
try:
self.q.get_nowait()
except queue.Empty:
pass
self.q.put(frame)
def read(self):
return self.q.get()
def terminate(self):
self.stop_threads = True
self.cap.release()
cv2.putText()
2、cv2图像翻转镜像
https://blog.csdn.net/m0_38082783/article/details/128897737
img = cv2.rotate(img,cv2.ROTATE_90_COUNTERCLOCKWISE) ##逆时针90
img = cv2.flip(img, 1) ##水平镜像
3、cv2.putText(),cv2.rectangle()
https://www.fke6.com/html/45S8FFN822LM.html
https://www.cnblogs.com/shuangcao/p/11344436.html
https://blog.csdn.net/m0_51004308/article/details/114992313
cv2.rectangle(img, (result["bbox"][0], result["bbox"][1]), (result["bbox"][2], result["bbox"][3]), (0, 0, 255), thickness=2)
cv2.putText(img,"距离:"+str(round(distance,2))+"cm",(12,50),cv2.FONT_HERSHEY_SIMPLEX,1,(255,255,255),2,cv2.LINE_AA)
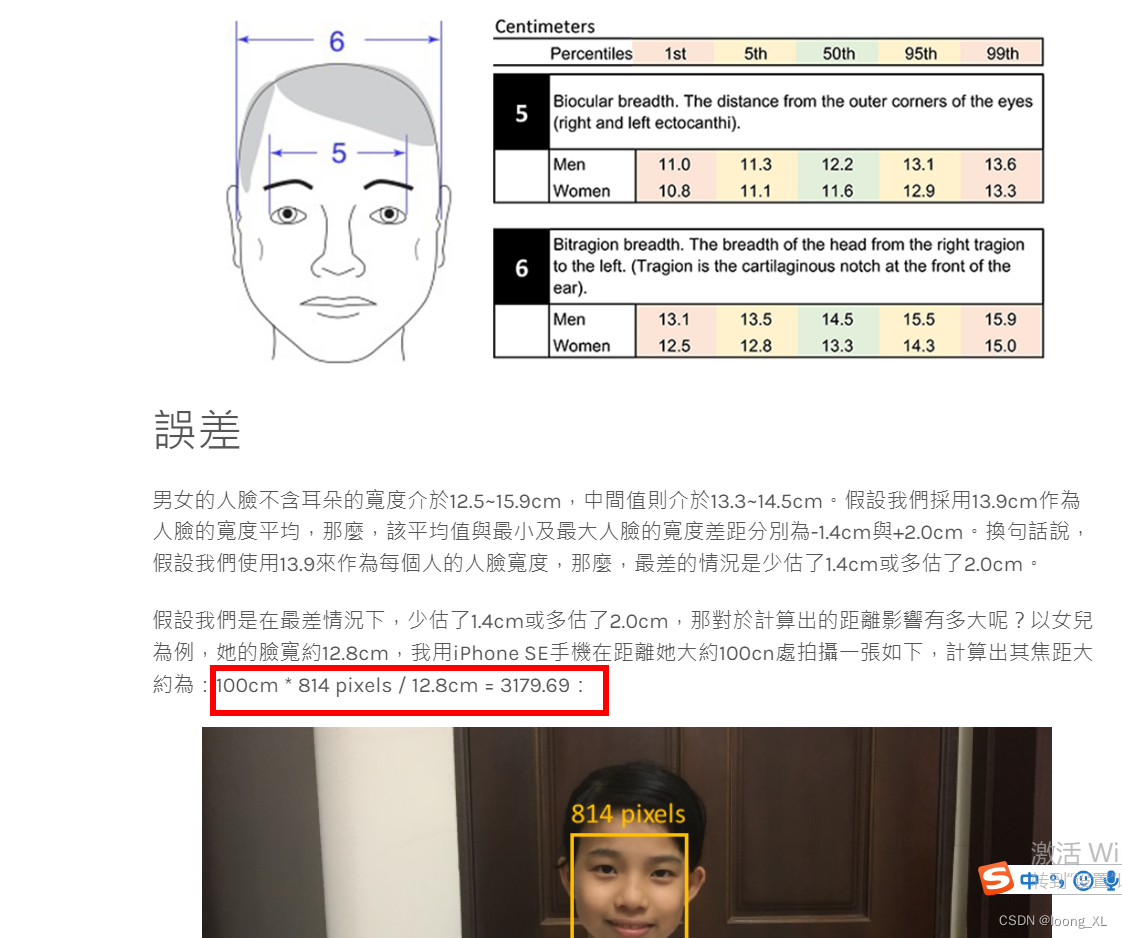
4、相机焦距计算
参考:
https://www.30pf.com/n/259.html
https://chtseng.wordpress.com/2018/09/18/%E5%A6%82%E4%BD%95%E4%BC%B0%E7%AE%97%E5%89%8D%E6%96%B9%E4%BA%BA%E7%89%A9%E7%9A%84%E8%B7%9D%E9%9B%A2/
首先第一步要计算出相机的焦距,所以要人提前去实际距离拍一张确定的图片算出具体焦距,
print(“人脸摄像头距离:”,481.5*13.5/(result[“bbox”][2]-result[“bbox”][0]))
5、直角三角形角度计算
https://blog.csdn.net/qq_35251502/article/details/112653632
import math
math.acos(30/ distance) *180/3.14159
6、cv2截图
# 输入两个对角点的坐标,裁剪图片
def cut_pic(img_path, point_list):
[(x1, y1), (x2, y2)] = point_list
# img = cv2.imread(img_path)
# img = np.array(img)
# 新图片
# print(img.shape)
# 此处注意opencv的顺序是先h,后w,然后c。
img_new = img_path[y1:y2, x1:x2, :]
cv2.imwrite("save.png", img_new)
##截图(人脸识别框截图人脸坐标)
cut_pic(img, [(result["bbox"][0]-15, result["bbox"][1]-20), (result["bbox"][2]+15, result["bbox"][3]+20)])
整体代码
# coding=utf-8
import cv2
import insightface
import numpy as np
import queue
import threading
import time
# 输入两个对角点的坐标,裁剪图片
def cut_pic(img_path, point_list):
[(x1, y1), (x2, y2)] = point_list
# img = cv2.imread(img_path)
# img = np.array(img)
# 新图片
# print(img.shape)
# 此处注意opencv的顺序是先h,后w,然后c。
img_new = img_path[y1:y2, x1:x2, :]
cv2.imwrite("save.png", img_new)
# 自定义无缓存读视频类
class VideoCapture:
"""Customized VideoCapture, always read latest frame"""
def __init__(self, name):
self.cap = cv2.VideoCapture(name)
self.q = queue.Queue(maxsize=3)
self.stop_threads = False # to gracefully close sub-thread
th = threading.Thread(target=self._reader)
th.daemon = True # 设置工作线程为后台运行
th.start()
# 实时读帧,只保存最后一帧
def _reader(self):
while not self.stop_threads:
ret, frame = self.cap.read()
if not ret:
break
if not self.q.empty():
try:
self.q.get_nowait()
except queue.Empty:
pass
self.q.put(frame)
def read(self):
return self.q.get()
def terminate(self):
self.stop_threads = True
self.cap.release()
class FaceRecognition:
def __init__(self, gpu_id=0, face_db='face_db', threshold=1.24, det_thresh=0.50, det_size=(640, 640)):
"""
人脸识别工具类
:param gpu_id: 正数为GPU的ID,负数为使用CPU
:param face_db: 人脸库文件夹
:param threshold: 人脸识别阈值
:param det_thresh: 检测阈值
:param det_size: 检测模型图片大小
"""
self.gpu_id = gpu_id
self.face_db = face_db
self.threshold = threshold
self.det_thresh = det_thresh
self.det_size = det_size
# 加载人脸识别模型,当allowed_modules=['detection', 'recognition']时,只单纯检测和识别
self.model = insightface.app.FaceAnalysis(root='./',
# allowed_modules=None,
allowed_modules=['detection', 'recognition'],
providers=['CUDAExecutionProvider'])
self.model.prepare(ctx_id=self.gpu_id, det_thresh=self.det_thresh, det_size=self.det_size)
# 检测人脸
def detect(self, image):
faces = self.model.get(image)
results = list()
for face in faces:
result = dict()
# 获取人脸属性
result["bbox"] = np.array(face.bbox).astype(np.int32).tolist()
# result["kps"] = np.array(face.kps).astype(np.int32).tolist()
# print(np.array(face.landmark_3d_68))
# result["landmark_3d_68"] = np.array(face.landmark_3d_68).astype(np.int32).tolist()
# result["landmark_2d_106"] = np.array(face.landmark_2d_106).astype(np.int32).tolist()
# result["pose"] = np.array(face.pose).astype(np.int32).tolist()
# result["age"] = face.age
# gender = '男'
# if face.gender == 0:
# gender = '女'
# result["gender"] = gender
# 开始人脸识别
# embedding = np.array(face.embedding).reshape((1, -1))
# embedding = preprocessing.normalize(embedding)
# result["embedding"] = embedding
results.append(result)
return results
if __name__ == '__main__':
face_recognitio = FaceRecognition()
# 开启ip摄像头
cv2.namedWindow("camera")
# 这个地址就是下面记下来的局域网IP
video = "http://admin:admin@192.168.0.154:8081" # 此处@后的ipv4 地址需要修改为自己的地址
# video = "rtsp://admin:admin@192.168.0.154:8554/live"
# capture = cv2.VideoCapture(0)
# success, img = capture.read()
capture = VideoCapture(0)
img = capture.read()
index = 0
imgname = -1
while True:
cv2.imshow("camera", img)
# success, img = capture.read()
img = capture.read()
# img = cv2.rotate(img,cv2.ROTATE_90_COUNTERCLOCKWISE) ##逆时针90
img = cv2.flip(img, 1) ##水平镜像
print("图像大小:",img.shape)
index+=1
# 不进行旋转
# 人脸检测
# img = cv2.imdecode(np.fromfile(img, dtype=np.uint8), -1)
if index//10==0:
# 人脸识别
results = face_recognitio.detect(img)
for result in results:
cv2.rectangle(img, (result["bbox"][0], result["bbox"][1]), (result["bbox"][2], result["bbox"][3]), (0, 0, 255), thickness=2)
print('人脸框坐标:{}'.format(result["bbox"]))
print("人脸宽像素:",result["bbox"][2]-result["bbox"][0])
# print("人脸摄像头距离:",481.5*13.5/(result["bbox"][2]-result["bbox"][0]))
# cv2.putText(img,str(round(481.5*13.5/(result["bbox"][2]-result["bbox"][0]),2))+"cm",(10,500),cv2.FONT_HERSHEY_SIMPLEX,1,(255,255,255),2,cv2.LINE_AA)
distance = 607*13.5/(result["bbox"][2]-result["bbox"][0])
print("人脸摄像头距离:",distance)
##截图
cut_pic(img, [(result["bbox"][0], result["bbox"][1]-20), (result["bbox"][2], result["bbox"][3]+20)])
import math
print("人脸摄像头角度:",math.acos(30/ distance) *180/3.14159)
cv2.putText(img,"距离:"+str(round(distance,2))+"cm",(12,50),cv2.FONT_HERSHEY_SIMPLEX,1,(255,255,255),2,cv2.LINE_AA)
index=0
# if key == 27:
# # 按esc键退出
# print("esc break...")
# break
# 4 若键盘按下q则退出播放
if cv2.waitKey(20) & 0xff == ord('q'):
break
capture.release()
cv2.destroyWindow("camera")