目录
第一章 绪论 1
1.1 研究的背景与意义[1] 1
1.2 机器人的研究现状[4] 2
1.3机器人的发展趋势 4
1.4本文的主要研究内容 5
第二章 机器人总体方案设计 7
2.1 小型仓储机器人的功能 7
2.2 传感器系统[13] 7
2.3 移动载体 7
2.4 自由度与机器人的运作 8
2.5 控制方式的选择 9
2.6 小结 10
第三章 机器人的手部设计 11
3.1 手部的结构设计 11
3.1.1 概述 11
3.1.2 设计时应考虑的几个问题 11
3.1.3 手部夹紧力的计算 12
3.1.4 弹簧的计算 13
3.15 手部主轴的校核计算 14
3.2 驱动方式 17
3.2.1 手部电机选择原则 19
3.2.2 手部电机的选择 21
3.2.3 电机转速与夹紧力速度几何关系的确定 22
第四章 手臂的设计 23
4.1 手臂结构设计 23
4.2 手部质量计算 23
4.3 手臂计算及电机选择 24
4.4 小结 25
第五章 腰身及底座的设计 26
5.1 腰身的设计 26
5.1.1 腰身以上部分的重量计算 26
5.1.2 腰身计算及电机选择 26
5.2底座的设计 27
5.2.1 底座机构设计 27
5.2.2 底座以上部分的重量计算 28
5.2.3 底座电机选择 28
5.3 齿轮的校核计算 28
5.3.1 选择齿轮材料、热处理方法、精度及齿数 28
5.3.2 验算齿面接触疲劳强度 29
5.3.3 校核齿根弯曲疲劳强度 31
5.3 小结 32
第六章 结论与展望 33
6.1 结论 33
参考文献 34
致 谢 35
第二章 机器人总体方案设计
2.1 小型仓储运机器人的功能
仓储机器人应具备以下功能:
(1)移动:通过机器人的移动实现物料的远距离搬运;
(2)导航跟定位;能够自主的按照预先设置的路线运行,并获得位置资料;
(3)运输:能搬运物料从A位置到B位置;
(4)规划路径:在离线的状态下,操作者要为机器人在结构化的环境中寻找无碰撞路径;
(5)避障(扩展功能):机器人应该具有一定的感受、适应外界环境变化的能力,尤其是要能检测出明显的障碍物,自动调用避障策略;
(6)无线通讯:有数据传输功能,有效距离1000米。
2.2 传感器系统[13]
传感器系统属于机器人控制系统,是整个机器人的感觉器官,负责探测工作环境以及检测机器人自身的运动。传感器系统有能检测机器人运动的传感器和实现机器人可扩展功能所需的传感器。下面主要介绍能实现各种基本作业的传感器:
(1)行进距离检测:编码器,采用积分增量思想,具有较好的短期精度;
(2)偏转角度检测:陀螺,测量旋转角速度,无需外部参考,适于短时间的精确定位;
(3)起点、终点摆放台检测:微动开关,反馈是否接触摆放台侧壁信息;:
(4)物料抓取检测:微动开关,检测物料是否被有效抓起;
(5)(可扩展功能)突出的障碍物检测:采用超声波传感器行进路径上有无障碍物;
(6)(可扩展功能)运行环境白色引导线检测:采用颜色传感器识别白线信息,利用白线导航。
2.3 移动载体
移动载体能执行小型仓储机器人的移动功能。常见的移动载体有轮式、履带式和足式行走机构,此外还有各种轮、履跟腿的混合式结构。
(1)轮式
轮式移动载体一直是平坦地面上运动的最有效的工具。它具有能高速稳定移动、能量利用效率高、机构和控制简单等优点,缺点是移动场所限制在平面上,且一般情况下需要一定的转弯半径,因而造成灵活性下降。轮式移动载体依据车轮的数量可分为 1轮、2轮、3轮、4轮及多轮机构。单轮和双轮主要是进行直立稳定移动控制问题的基础研究,而不着眼于移动机器人的实用化问题。从高速移动时加强稳定性的观点出发,多数采用的是四轮机构。五轮以上的机构有较大的稳定性,适合子台阶、阶梯或三维弯曲路面等非平地状态的移动。全方位车轮机构是目前常用的轮式机构,具备全方位移动功能,操作灵活,特,按照所用轮子的类型和驱动方式,轮式移动载体可分为五大类,即(3,0), (2, 0), (2, 1), (1, 1)和(1, 2),其中前面的数字表示移动度(degree of mobility),后面的数字表示转向度(degree of steering)。轮式机器人在地面上滚动时,会受到非完整约束,这是由轮子的运动本质决定的,即轮子在地面上做无滑动的纯滚动。尽管非完整系统类别与轮式平台的类型有关,但所有轮式平台都是非完整的。[5]
(2)履带式
为了改善车轮对松软地面和不平坦地面的适应能力,履带式移动机构被广泛采用。履带式移动机构有以下特点:支承面积大,接地比压小,适于松软和泥泞地面作业。机动性好,爬坡、越沟等性能好。履带不易打滑,牵引附着能力好。履带运动方式在不平地面上的机动性很差,转弯不便,转向时能耗较大。
(3)足式
足式行走机器人即所谓的步行机器人。步行机器人不仅能在平地上而且能在凹凸不平的地面上行走、跨越障碍、上下台阶,具有独特的优越性能。但是,要控制它的步行和不倾倒有很大的难度,目前实现上述功能的机器人很少。四足机器人普遍存在控制复杂和步行速度低、步幅小等缺点,实用化的成果则更少。
显然,本课题所研究的机器人主要在平面的环境中运行,选用轮式移动载体最为合理,即采用两轮独立驱动的方式,通过控制两个驱动轮的速度,使车体跟踪不同的轨迹曲线。这种结构方式的优点是转向灵活,当两轮速度值相同,方向不同时,车体可以原地回转。






智能仓储机器人设计
news2026/2/11 6:26:26
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/64606.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
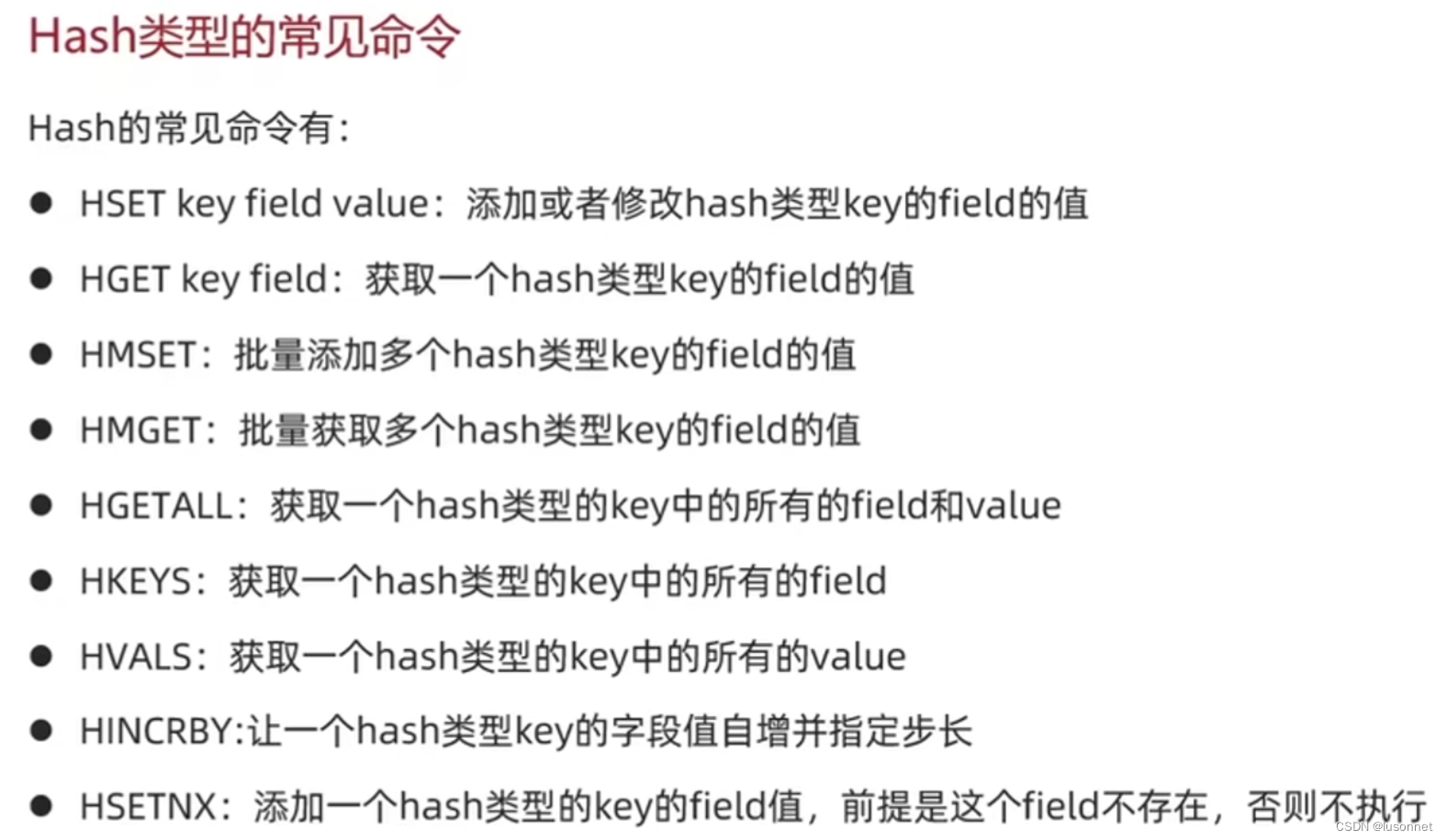
【Redis】初识Redis
1.初识Redis1.1安装1.2数据结构1.2.1 通用命令1.2.2 String类型key的结构1.2.3 Hash类型2.Jedis2.1 添加依赖及配置2.2 配置StringRedisTemplte1.初识Redis
Redis是一个基于内存的键值型NoSQL数据库。其具有性能优越、持久化的特点,能够支持每秒十几万次的读写操作…
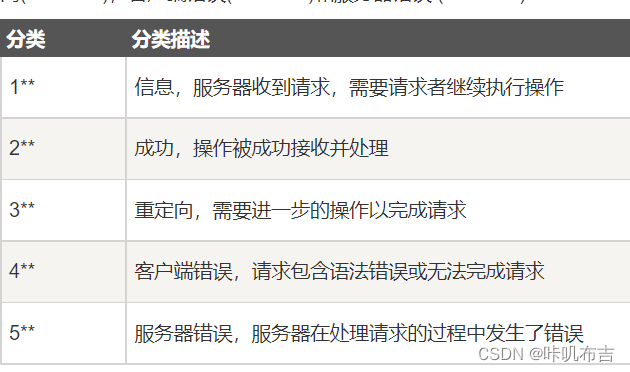
前端面试题之【HTTP/HTML/浏览器】
1.说一下http与https
http:超文本传输协议,https:超文本传输安全协议 区别:
http传输数据是未加密的,是明文传输;https使用ssl协议对数据进行加密处理;https协议需要ca证书,费用高…

【VUE 嵌套路由】
目录
1. 嵌套路由
2. 通俗小结 1. 嵌套路由
要使用菜单显示出“点击不同的菜单项显示不同的内容”的效果,需要使用嵌套路由!
因为,在当前设计中,App.vue是显示整个页面的入口,而App.vue就已经使用<router-view/…
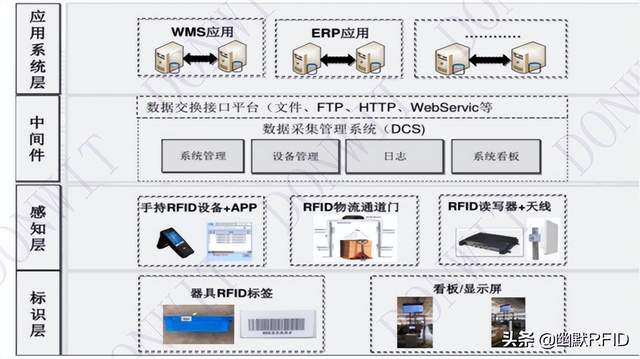
应急物资仓库管理系统-3D可视化管理系统
1. 系统介绍 RFID智慧应急物资仓库可视化管理系统是杭州东识科技有限公司基于物联网RFID技术、云计算技术、3D可视化技术、数据采集技术等,专门为政府、军队等部门量身定制的一体化物资综合管理平台。 本系统包括:物资安全监控部分——提供对环境温湿度监…
![[附源码]Python计算机毕业设计Django失物招领微信小程序论文](https://img-blog.csdnimg.cn/1e5cc57c26204824a12f9cca3f170aab.png)
[附源码]Python计算机毕业设计Django失物招领微信小程序论文
项目运行 环境配置: Pychram社区版 python3.7.7 Mysql5.7 HBuilderXlist pipNavicat11Djangonodejs。
项目技术: django python Vue 等等组成,B/S模式 pychram管理等等。
环境需要 1.运行环境:最好是python3.7.7,…
Slowloris DoS攻击的原理与简单实现
前言 Slowloris 攻击是我在李华峰老师的书——《Metasploit Web 渗透测试实战》里面看的,感觉既简单又使用,现在这种攻击是很容易被防护的啦。不过我也不敢真刀实战的去试,只是拿个靶机玩玩罢了。 废话还是写在结语里面吧。(划掉&…
Java 中重写了 equals 为什么还要重写 hashCode?
问题
不管是在书本或者是博客上,都会推荐我们在重写 equals 方法时重写 hashCode 方法。明明对象之间就是通过 equals 方法进行判断的,那么为什么非要写 hashCode 方法呢?
equals 实验
创建一个 Teacher 类。方便起见,就一个 name 属性。…
1.1 异步相关概念:初步了解
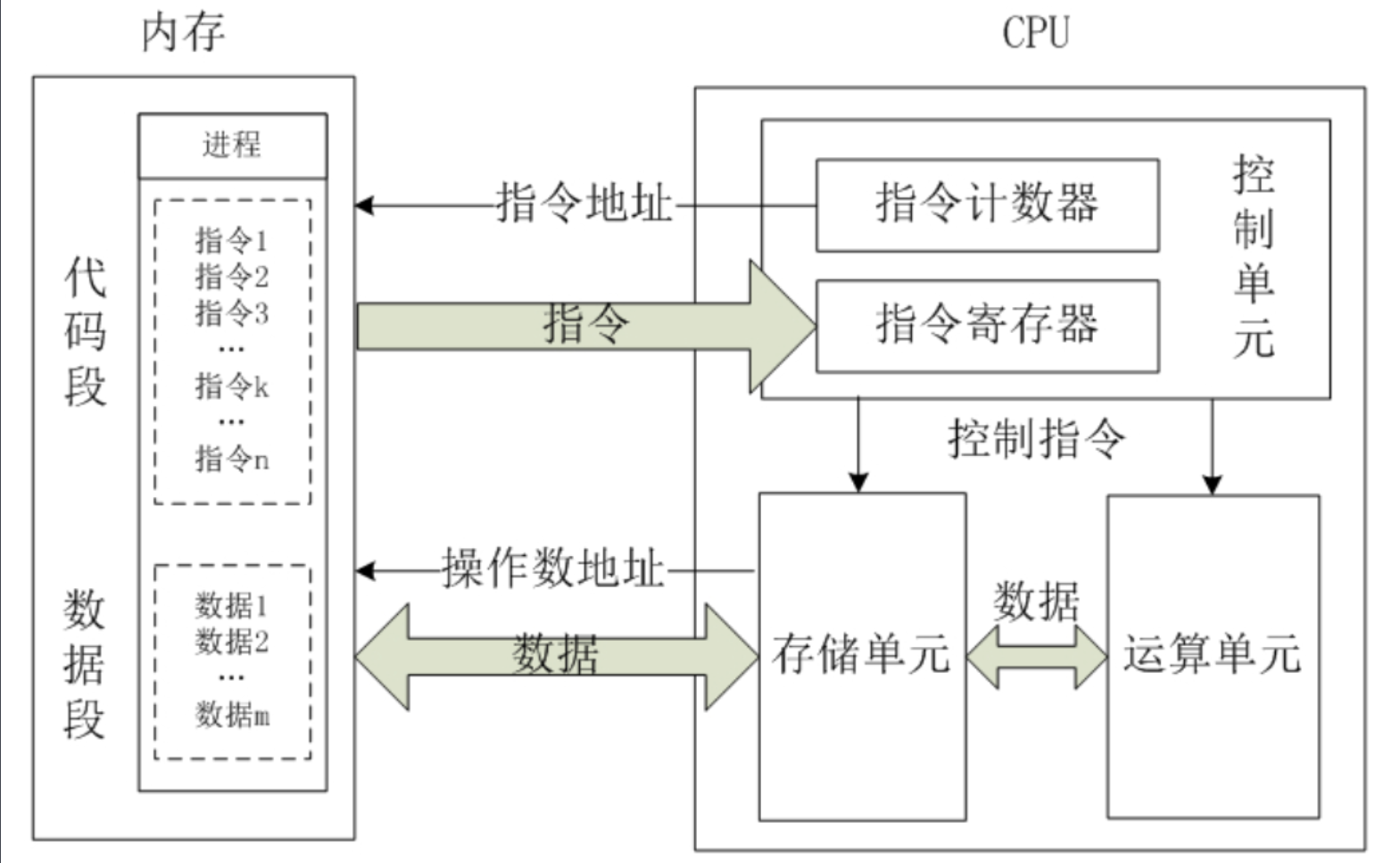
1.进程和线程的概念
计算机有5大基本组成部分,运算器,控制器,存储器,输入和输出。运算器和控制器封装到一起,加上寄存器组和cpu内部总线构成中央处理器(CPU)。cpu的根本任务,就是执…

2022年跨境电商卖家如何在Facebook上做广告【完整指南】
关键词:跨境电商卖家、Facebook广告 了解如何在 Facebook 上做广告对于大多数跨境电商卖家来说是一项非常重要的技能,因为您在 Facebook 上做广告,您的广告可以覆盖21.7 亿人——换句话说,接近世界人口的 30%。此外,该…

Java项目:SSM物业缴费管理系统
作者主页:源码空间站2022 简介:Java领域优质创作者、Java项目、学习资料、技术互助 文末获取源码 项目介绍
管理员角色包含以下功能: 管理员登录,管理员管理,住户管理,缴费列表,公告列表管理,用户反馈管理等功能。 用户角色包含以下功能&…
![[附源码]计算机毕业设计失物招领微信小程序论文Springboot程序](https://img-blog.csdnimg.cn/ec010e2bc3ee48f19218aaaeff4c6925.png)
[附源码]计算机毕业设计失物招领微信小程序论文Springboot程序
项目运行
环境配置:
Jdk1.8 Tomcat7.0 Mysql HBuilderX(Webstorm也行) Eclispe(IntelliJ IDEA,Eclispe,MyEclispe,Sts都支持)。 项目技术:
SSM mybatis Maven Vue 等等组成,B/S模式 M…

keras-gpu安装
需要安装: TensorFlow 安装(包含cudatoolkit、cuDNN) HDF5 和 h5py (如果你需要将 Keras模型保存到磁盘,则需要这些) graphviz 和 pydot (用于绘制模型图的可视化工具) Keras 一、更新驱动
先升级显卡驱动:https://zh…
【软件测试】测试老鸟老张,我的梦想是什么?梦想还在吗?
目录:导读前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜)前言
老张: 这…

QML + KDDockWidget 实现 tabwidget效果( 窗口可独立浮动和缩放)
前言
前面文章介绍过在QML中使用ListView实现TabBar标签拖拽交换位置效果(文章在这里)
先在此基础上升级一下,结合KDDockWidget做一个可浮动的窗口效果。
关于KDDockWidget的介绍,以前的文章有写过,可参考ÿ…
![[附源码]Python计算机毕业设计SSM健身俱乐部管理系统(程序+LW)](https://img-blog.csdnimg.cn/c898cf46a1d5486196d98442bcb7ca81.png)
[附源码]Python计算机毕业设计SSM健身俱乐部管理系统(程序+LW)
项目运行
环境配置:
Jdk1.8 Tomcat7.0 Mysql HBuilderX(Webstorm也行) Eclispe(IntelliJ IDEA,Eclispe,MyEclispe,Sts都支持)。 项目技术:
SSM mybatis Maven Vue 等等组成,B/S模式 M…

移动WEB开发之rem布局--rem适配方案
思考
1. 我们适配的目标是什么? 2. 怎么去达到这个目标的? 3. 在实际的开发当中使用?
答案
1. 让一些不能等比自适应的元素,达到当设备尺寸发生改变的时候,等比例适配当前设备。
2. 使用媒体查询根据不同设备按比例…
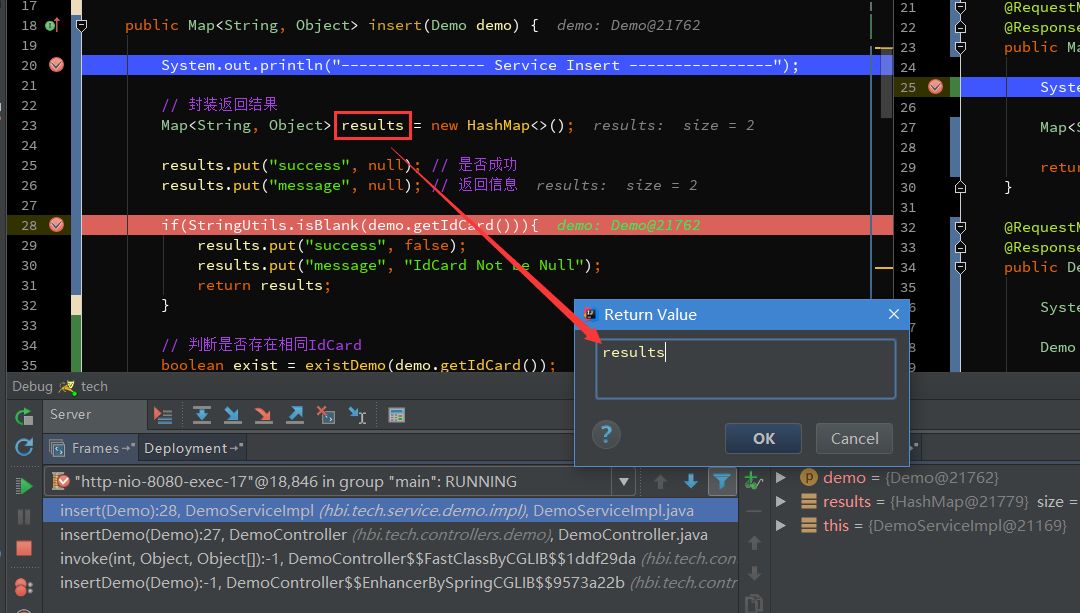
idea高级调试技巧
前言
对于一名开发者来说,找出并处理掉Bug是不可或缺的能力。能够熟练的调试程序将大大提升开发的效率。学好DeBug,再多Bug也不怕。Debug用来追踪代码的运行流程,通常在程序运行过程中出现异常,启用Debug模式可以分析定位异常发生…
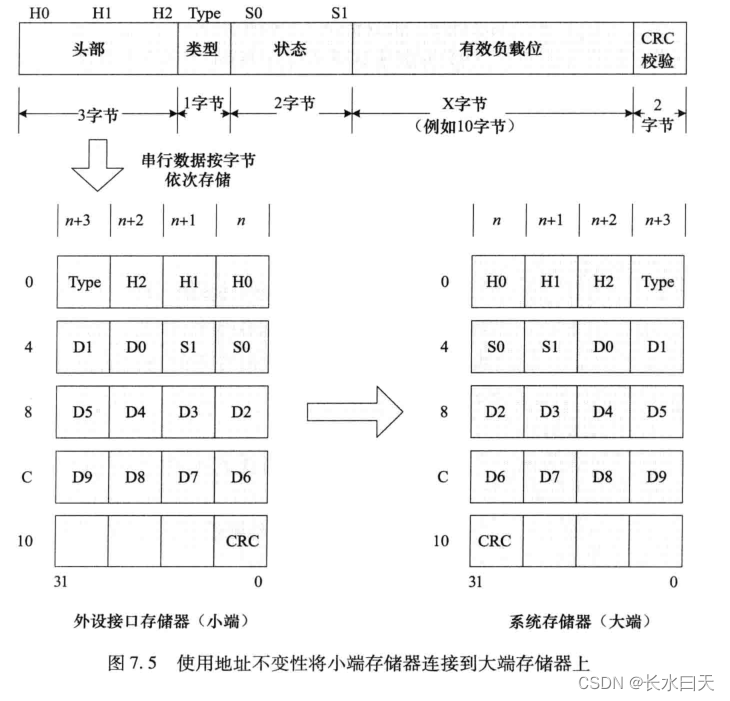
chapter7——处理字节顺序
目录1.定义2.小端模式和大端模式的比较3.处理字节顺序不匹配的问题4.访问32位存储器5.处理字节顺序不匹配6.字节顺序中性代码7.字节顺序中性编码指南1.定义
字节顺序定义数据在计算机系统中的存储格式。它描述存储器中地址的最高有效位(MSB)和最低有效位…

基于百度地图的交通查询的毕业设计(android)
目 录 1 前言 1 1.1 背景 1 1.2 论文主要内容与结构 1 2 基础技术介绍(一) 2 2.1 Android概述 2 2.2 Android架构 2 2.3 Android应用程序类型分析 5 3 基础技术介绍(二) 6 3.1 地图简介 6 3.1.1 地图概念 6 3.1.2 构成…