1.IIC简介
1.1 IIC概述
IIC即 Inter-Integrated Circuit(集成电路总线),是由 Philips 半导体公司在八十年代初设计出来的一种简单、双向、二线制总线标准。多用于主机和从机在数据量不大且传输距离短的场合下的主从通信。主机启动总线,并产生时钟用于传送数据,此时任何接收数据的器件均被认为是从机。
传输速率标准模式下可以达到100kb/s,快速模式下可以达到 400kb/s,高速模式下可达 3.4Mbit/s,具体使用要看设备的支持情况。IIC接口只需要两条总线线路,即 SCL(串行时钟线)、SDA(串行数据线),IIC 总线是半双工通信。本篇解决的问题就是使用FPGA驱动这两根线实现标准IIC协议,但要清楚使用IIC接口于某设备通信要同样遵守设备的要求,例如IIC接口的EEPROM,会要求现发送读写地址,发送读写指示等。
与UART不同的是,IIC总线上可以挂载若干个从机(一对多)通过主机下发的器件地址选择从机进行通信,并且需要有双向IO的支持,抗干扰能力较弱。每个连接在总线上的 IIC 器件都有一个唯一的器件地址,在通信的时候就是靠这个地址来握手的。而UART为异步串行通信,可称为点对点通信,较为复杂,需要有波特率,即数据传输的间隔要相等,以及接收和发送两根线可实现全双工。
IIC传输时,按照从高到低的位序进行传输,即采用大端模式。大端模式:就是低位字节排放在内存的低地址端,高位字节排放在内存的高地址端。小端模式:是高位字节排放在内存的低地址端,低位字节排放在内存的高地址端。
1.2 总线结构
总线(Bus),是指计算机设备和设备之间传输信息的公共数据通道。总线是连接计算机硬件系统内多种设备的通信线路,它的一个重要特征是由总线上的所有设备共享,可以将计算机系统内的多种设备连接到总线上。如果是某两个设备或设备之间专用的信号连线,就不能称之为总线。
总线的性能直接影响到整机系统的性能,而且任何系统的研制和外围模块的开发都必须依从所采用的总线规范。总线技术随着微机结构的改进而不断发展与完善。常见的总线有好多,例如IIC总线、SPI总线、USB总线、JTAG接口、PCI-E总线等。IIC总线,结构如图所示。
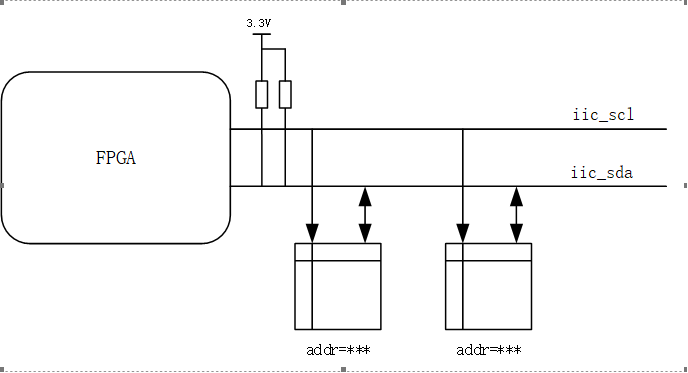
每个 IIC 器件都应该有一个器件地址,不同器件定义地址的方式是不同的,有的是软件定义,有的是硬件定义。例如某些单片机的 IIC接口作为从机时,其器件地址是可以通过软件修改从机地址寄存器确定的。而对于一些其他器件,如 CMOS 图像传感器、EEPROM 存储器,其器件地址在出厂时就已经完全或部分设定好了,具体情况可以在对应器件的数据手册中查到。
严格讲,主机不是直接向从机发送地址,而是主机往总线上发送地址,所有的从机都能接收到主机发出的地址,然后每个从机都将主机发出的地址与自己的地址比较,如果匹配上
了,这个从机就会向总线发出一个响应信号。主机收到响应信号后,开始向总线上发送数据, 与这个从机的通讯就建立起来了。如果主机没有收到响应信号,则表示寻址失败。
需要注意的是,对于 i2c 总线,要求连接到总线上的输出端必须是开漏输出结构,给不了高电平,所以总线上所有的高电平应该是由上拉电阻上拉达到效果的,而不是由主机直接给总线赋值 1 就能实现,本例中需要输出高电平时,输出高阻状态。
2.IIC通信协议
2.1消息种类
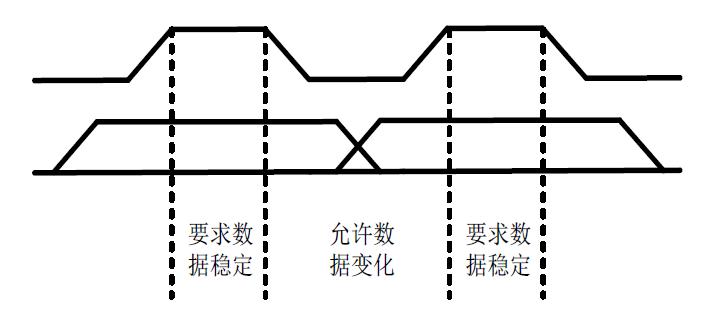
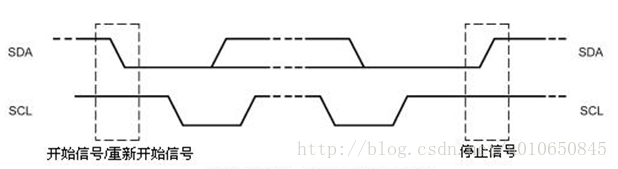
IIC 协议规定,在时钟(SCL)为高电平的时候,数据总线(SDA)必须保持稳定,数据总线(SDA)在时钟(SCL)为低电平的时候才能改变。因此,当SCL为高电平时,改变SDA的值,这些情况被赋予了特殊的含义,主机向从机发送的信息种类有启动信号、停止信号、7位地址码、读/写控制位、10位地址码(地址扩展)、数据字节、重启动信号、应答信号、时钟脉冲。而从机向主机发送的信息种类有应答信号、数据字节、时钟低电平(时钟拉伸)。
- 空闲状态:在空闲状态下SDA与SCL均为高电平;
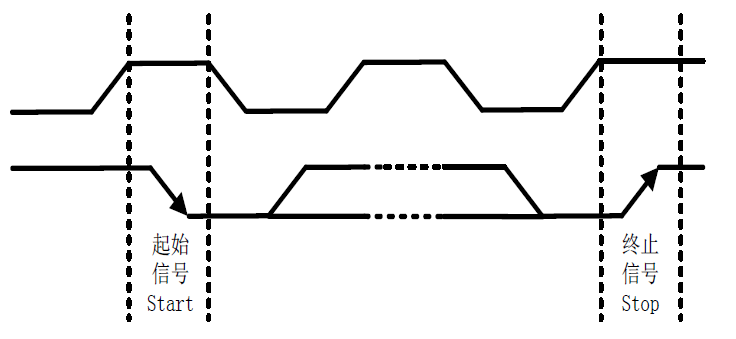
- 起始信号:在时钟(SCL)为高电平的时候,数据总线(SDA)由高到低的跳变;
- 停止信号:在时钟(SCL)为高电平的时候,数据总线(SDA)由低到高的跳变;
4. 重新开始信号:在IIC总线上,由主机发送一个开始信号启动一次通信后,在首次发送停止信号之前,主机通过发送重新开始信号,可以转换与当前从机的通信模式,或是切换到与另一个从机通信。当SCL为高电平时,SDA由高电平向低电平跳变,产生重新开始信号,它的本质就是一个开始信号。
5.应答位:IIC总线上的所有数据都是以8位字节传送的,发送器每发送一个字节,就在第9个时钟脉冲期间释放数据线,由接收器反馈一个应答信号。应答信号为低电平时,规定为有效应答位(ACK简称应答位),表示接收器已经成功地接收了该字节;应答信号为高电平时,规定为非应答位(NACK),一般表示接收器接收该字节没有成功。因此一个完整的字节数据传输需要9个时钟脉冲。如果从机作为接收方向主机发送非应答信号,主机方就认为此次数据传输失败;如果是主机作为接收方,在从机发送器发送完一个字节数据后,向从机发送了非应答信号,从机就认为数据传输结束,并释放SDA线。不论是以上哪种情况都会终止数据传输,这时主机或是产生停止信号释放总线或是产生重新开始信号,开始一次新的通信。
6.插入等待时间:如果被控器需要延迟下一个数据字节开始传送的时间,则可以通过把时钟线SCL电平拉低并且保持,使主控器进入等待状态。一旦被控器释放时钟线,数据传输就得以继续下去,这样就使得被控器得到足够时间转移已经收到的数据字节,或者准备好即将发送的数据字节。

7.器件地址:任何IIC设备都有一个7位地址,理论上,现实中只能有127种不同的IIC设备。实际上,已有IIC的设备种类远远多于这个限制,在一条总线上出现相同的地址的IIC设备的概率相当高。为了突破这个限制,很多设备使用了双重地址——7位地址加引脚地址(external configuration pins)。主机向从机发送的第一个字节为器件地址加1Bit读写位,0代表写操作,1代表读操作。
2.2通信过程
写过程
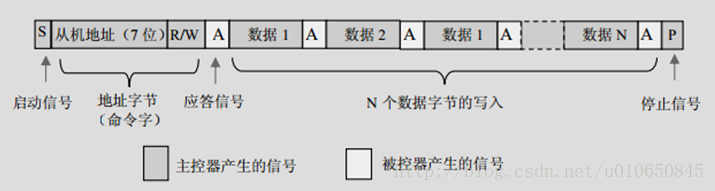
- 主机设置SDA为输出;
- 主机发起起始信号;
- 主机传输器件地址字节,其中最低位为 0,表明为写操作;
- 主机设置 SDA 为三态门输入,读取从机应答信号;
- 读取应答信号成功,主机设置 SDA 为输出,传输待写入的数据;
- 设置 SDA 为三态门输入,读取从机应答信号;
- 读取应答信号成功,主机产生 STOP 位,终止传输。
读过程
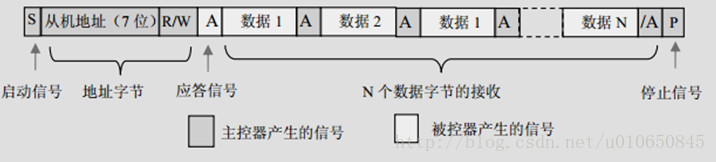
- 主机设置 SDA 为输出;
- 主机发起起始信号;
- 主机传输器件地址字节,其中最低位为 1,表明为读操作;
- 设置 SDA 为三态门输入,读取从机应答信号;
- 读取应答信号成功,主机设置SDA为三态门输入,读取SDA总线上的一个字节的数据;
- 主机收到数据后向从机反馈一个应答信号;
- 从机收到应答信号后再向主机发送下一个数据;
- 当主机完成接收数据后,向从机发送一个“非应答信号(ACK=1)”,从机收到ACK=1 的非应答信号后便停止发送;
- 主机发送非应答信号后,再发送一个停止信号,释放总线结束通信。
3.开发思路
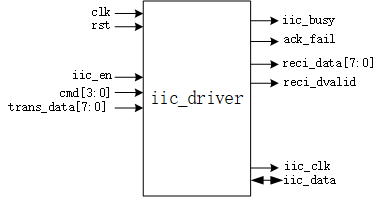
IIC协议虽然只有两根线,协议规定也简明清晰,但是要使用HDL实现,并不是一件“愉快”的事情,因为思路很难理清楚,可能会导致代码臃肿,资源浪费的情况出现。如下图所示为iic_driver模块,IIC协议规定每8bit数据为一个传输单位,需要有一个ACK信号,基于此,将所有的IIC消息分为带起始位写8bit,不带起始位写8bit,带停止位写8bit,不带起始位和停止位读8bit,带停止位的读五种操作类型,默认都带有应答位。因此创建IIC驱动模块的主要思路就是,保持读或写8bit的主体结构,区分五种命令以区分是否带起始位、是否带停止位、是否有ACK、是读还是写。当针对不同的设备器件写入不同的器件地址,或者是不同器件有不同的操作要求时,可在此驱动之上写一个模块用来满足器件要求,称此模块为iic_ctrl模块。例如,某型eeprom的一条写入数据命令依次为,带起始信号写入器件地址和写请求,不带起始位写入EEPROM内部地址,带停止位写入要写入的8bit数据,完成写入操作,iic_ctrl的任务就是将此写入命令拆分成了3个8bit主体,然后“调用”驱动模块完成写入操作。本节仅介绍驱动模块的编写,如下图所示。clk和rst分别为该模块的时钟和脉冲信号;iic_en为输入脉冲信号,拉高一次代表执行一次“8bit操作”,cmd表征了具体执行哪一个“8bit”操作,cmd[0] 1为读操作,0为写操作。cmd[1] 1为带起始位,0为不带起始位。cmd[2] 1为带停止位,0为不带停止位。cmd[3] 1为ACK,0为NOACK(在带停止位的读或者写操作中可以不要ACK信号)。Trans_data为要传入的8bit数据,不同的操作可能包含了器件地址、读写指示等。矩形框右侧为输出信号,iic_busy代表驱动模块正在忙,无法相应当前请求。Ack_fail标识是否有相应失败的情况,reci分别是读取到的数据和该数据的同步信号。
4.仿真分析
代码如下:
iic_sim文件如下:
module iic_sim();
reg clk_50;
reg rst_n;
reg iic_en;
reg [3:0]cmd;
reg [7:0]trans_data;
wire iic_busy;
wire ack_fail;
wire [7:0]reci_data;//接收数据
wire reci_dvalid;//接收数据同步信号
wire iic_clk;
wire iic_data;//使用force
initial begin
clk_50 = 0;
rst_n = 0;
iic_en = 0;
cmd = 0;
trans_data = 0;
#1000
rst_n = 1;
#100
//仿真写过程:向某器件地址中写入data1和data2
//写起始位+器件地址+读写指示+ACK
do_iic(1'b1,4'b1010,8'b11001010);
#20
iic_en = 0;
@(negedge iic_busy)
#10
//写8bit数据1+ACK
do_iic(1'b1,4'b1000,8'b00110011);
#20
iic_en = 0;
@(negedge iic_busy)
#10
//写8bit数据2+ACK+停止位
do_iic(1'b1,4'b1100,8'b01011010);
#20
iic_en = 0;
@(negedge iic_busy)
#110
//仿真 8bit读 过程
do_iic(1'b1,4'b1001,8'b0);
#20
iic_en = 0;
end
always #10 begin
clk_50 = ~clk_50;
end
task do_iic;
input user_en;
input [3:0]user_cmd;
input [7:0]user_data;
begin
iic_en <= user_en;
cmd <= user_cmd;
trans_data <= user_data;
end
endtask
//将一次eeprom动作拆解成多个iic动作
iic_driver sub_for_one_iic(
.clk_50 (clk_50),
.rst_n (rst_n),
.iic_en (iic_en),
.cmd (cmd), //3:0
.trans_data (trans_data),
.iic_busy (iic_busy),
.ack_fail (ack_fail),
.reci_data (reci_data),
.reci_dvalid(reci_dvalid),
.iic_clk (iic_clk),
.iic_data (iic_data)
);
endmoduleiic_driver文件如下:
module iic_driver(
input clk_50,
input rst_n,
input iic_en,
input [3:0]cmd,
input [7:0]trans_data,
output reg iic_busy,
output reg ack_fail,
output reg [7:0]reci_data,//接收数据
output reg reci_dvalid,//接收数据同步信号
output reg iic_clk,
inout iic_data
);
//系统时钟采用50MHz
parameter SYS_CLOCK = 50_000_000;
//SCL总线时钟采用400kHz
parameter SCL_CLOCK = 400_000;
//产生时钟SCL计数器最大值
localparam SCL_CNT_M = SYS_CLOCK/SCL_CLOCK/4 - 1;
reg[3:0]state;
reg[3:0]sub_cmd;
reg[7:0]sub_data;
reg sub_ack;
always@(posedge clk_50 or negedge rst_n)
if(!rst_n)begin
sub_cmd <= 4'd0;
sub_data<= 8'd0;
end else if(iic_en)begin
sub_cmd <= cmd;
sub_data<= trans_data;
end
reg en_div;
reg [19:0]div_cnt;
always@(posedge clk_50 or negedge rst_n)
if(!rst_n)
div_cnt <= 20'd0;
else if(en_div)begin
if(div_cnt < SCL_CNT_M)
div_cnt <= div_cnt + 1'b1;
else
div_cnt <= 0;
end
else
div_cnt <= 0;
wire imp_node;
reg out_oe; //1代表写 , 0代表读.
reg out_10;//代表输出高地电平
reg [5:0]rd_cnt;
assign imp_node = div_cnt == SCL_CNT_M;
reg [1:0]cnt;
//时钟生成 iic_clk信号
always@(posedge clk_50 or negedge rst_n)
if(!rst_n)begin
iic_clk <= 0;
end else if(en_div)begin
if(imp_node)begin
cnt <= cnt + 1;
case (cnt)
0:iic_clk <= 0;
1:iic_clk <= 1;
2:iic_clk <= 1;
3:iic_clk <= 0;
default: iic_clk <= 0;
endcase
end
end
assign iic_data = !out_10 && out_oe ? 1'b0:1'bz; //IIC上拉电阻,高电平无需输出
always@(posedge clk_50 or negedge rst_n)
if(!rst_n)begin
state <= 0;
en_div<= 0;
cnt <= 0;
out_10 <= 1;
out_oe <= 0;
rd_cnt <= 0;
reci_dvalid <= 0;
sub_ack <= 0;
ack_fail <= 0;
iic_busy<=0;
reci_data <=0;
end else begin
case (state)
0:begin //接收指令,进入选择选项
ack_fail <= 0;
if(iic_en)begin
en_div<=1;
iic_busy<=1;
state <= state + 1;
end else begin
en_div<=0;
end
end
1:begin//根据不同指令分发
//cmd[0] 1为读操作,0为写操作
//cmd[1] 1为带起始位,0为不带起始位
//cmd[2] 1为带停止位,0为不带停止位
//cmd[3] 1为ACK,0为NOACK
if(sub_cmd[1])
state <= 2;
else if(sub_cmd[0])
state <= 3;
else
state <= 4;
end
2:begin //生成起始位 START
if(imp_node)begin
case(cnt)
0:begin out_10 <= 1; out_oe <= 1'd1;end //keep high(clk=0)
1:;//data high and clk=1
2:begin out_10 <= 0; end//data high clk=0 产生起始位
3:;
default:begin out_10 <= 1;end
endcase
if(cnt==3)begin
if(sub_cmd[0]) //读操作
state <= 3;
else
state <= 4; //写操作
end
end
end
3:begin //读操作
if(imp_node)begin
case(cnt)
0:begin out_oe <= 1'd0;end
1:;
2:begin reci_data <= {reci_data[6:0],iic_data}; end
3:begin
if(rd_cnt<7)
rd_cnt <= rd_cnt + 1;
else begin
rd_cnt <= 0;
state <= 6;
reci_dvalid <= 1;
end
end
default:begin out_10 <= 1;end
endcase
end
end
4:begin //写操作
if(imp_node)begin
case(cnt)
0:begin out_10 <= sub_data[7-rd_cnt];out_oe<=1'b1;end
1:;
2:;
3:begin
if(rd_cnt<7)
rd_cnt <= rd_cnt + 1;
else begin
rd_cnt <= 0;
state <= 5;
end
end
default:begin out_10 <= 1;end
endcase
end
end
5:begin //获取应答
if(imp_node)begin
case(cnt)
0:begin out_oe<=1'b0;end
1:;
2:sub_ack <= iic_data;
3:begin
//状态跳转
if(sub_cmd[2])
state <= 7; //产生终止位
else begin
state <= 0;
iic_busy <= 0;
end
//收到错误应答
if(sub_ack)
ack_fail <= 1;
end
default:begin out_10 <= 1;end
endcase
end
end
6:begin //生成应答
reci_dvalid <= 0;
if(imp_node)begin
case(cnt)
0:begin
out_oe<=1'b1;
if(sub_cmd[3])//应答
out_10 <=0;
else
out_10 <=1;
end
1:;
2:;
3:begin
if(sub_cmd[2])
state <= 7;
else begin
iic_busy <= 0;
state <= 0;
end
end
default:begin out_10 <= 1;end
endcase
end
end
7:begin //产生终止信号
ack_fail <= 0;
if(imp_node)begin
case(cnt)
0:begin out_10 <= 0;out_oe<=1'b1;end
1:;
2:begin out_10 <= 1; end
3:begin
iic_busy <= 0;
state <= 0;
end
default:begin out_10 <= 1;end
endcase
end
end
default: state <= 0;
endcase
end
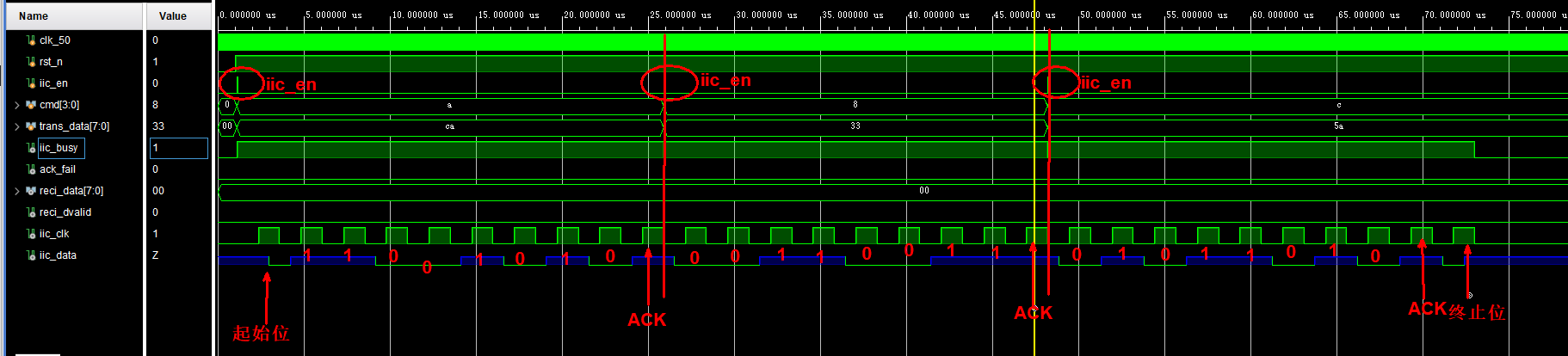
endmodule模拟写入某器件过程为带起始位写入7bit器件地址和1bit读写指令,随后写入一个8bit,在带停止位写入一个8bit,仿真结果如下图所示。
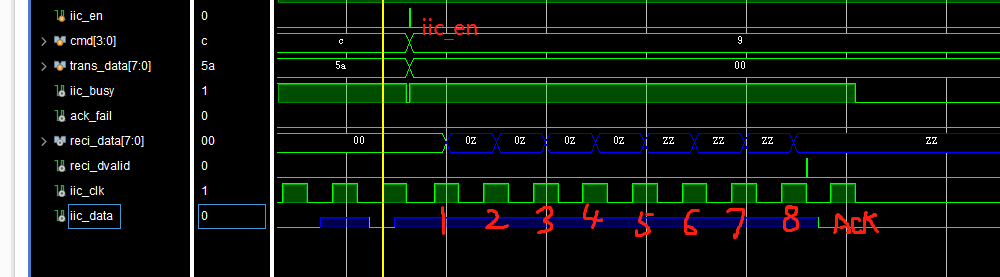
代码中关于读8bit的仿真结果如下图所示。仿真结果正确。
![[附源码]计算机毕业设计少儿节目智能推荐系统Springboot程序](https://img-blog.csdnimg.cn/ebdbb943fff14ecea1f914bf02073533.png)







![[附源码]Python计算机毕业设计Django市场摊位管理系统](https://img-blog.csdnimg.cn/242f00509d3844c3922da346bc622052.png)